一种基于UWB测距的非视距效应补偿室内定位方法
本发明属于无线信号室内定位领域,尤其涉及一种基于uwb测距的非视距效应补偿室内定位方法。
背景技术:
1、随着物联网以及5g时代的到来,基于位置信息的服务(location based service,lbs)已经走进了人们生活的方方面面并发挥着极其重要的作用,与此同时人们大多数的生活工作逐渐由室外转向室内,因此人们对室内环境中基于位置信息服务的需要也愈发迫切,这使得室内定位的未来市场会非常巨大,故而室内定位将会在未来的一段时间持续作为学术界的研究热点之一。
2、定位,按字面意思来说就是获取人们自身所处的精确位置的过程,定位以及位置服务与国防安全、经济发展和社会民生息息相关。从有记载的人类历史开始,人们对自身所处位置的探索就从未停止,在原始社会,人们依靠日月星辰来判别方向,后来人们学会了使用指南针来进行航海活动,到了科技高度发达的现代社会,人们可以依靠卫星电波来确定自身所处的位置。以上所说的定位情形大多为室外场景,而室内环境与室外有着极大的不同,室内环境相对要复杂的多。传统的室外定位系统(如:gps,北斗等)能够完全有效地解决户外的定位问题,然而在室内环境中,卫星信号会受到各种墙体的阻隔,这会使卫星信号到达室内环境中的衰减很大,从而导致gps定位系统在室内环境中并不能提供人们所希望的定位性能或者说根本无法提供定位服务。室内定位是一种通过锁定室内无线设备的位置去确定设备持有者的位置坐标的过程,其工作原理是个人移动终端通过无线通信技术实时为用户提供位置信息,因此基于室内位置信息的服务已经成为了全球定位系统的重要延伸。
3、uwb技术和其他的用于室内定位的无线信号传输技术相比具有不可替代的优势,其不使用载波而是使用纳秒级别的窄脉冲来直接传递信号,这使得信号的频谱范围非常宽,可以在信噪比较低的状态下工作;此外uwb脉冲具有较低的功率谱密度,这使得其具有极高的时间分辨率,同时也具有较强的抗多径能力。uwb定位系统因其独特的通信机制可以使其在室内环境中实现厘米级的定位精度,并且在体积、功耗、抗多径方面都有着巨大的优势。
技术实现思路
1、为解决上述技术问题,本发明提出了一种基于uwb(超宽带)测距的非视距效应补偿室内定位方法,该方法可以用在大多数的基于到达时间的室内无线定位方法中,概括性的来说该方法的主要思想就是通过信号传播过程中的物理特性来鉴别可移动的目标节点在定位过程中是否接收到非视距的感知参数,并且要确定出目标节点是到哪一个锚节点之间存在非视距现象,对于存在非视距的测量信息要进行逆向补偿,而不存在非视距效应的感知参数则不需要进行补偿,从原理上讲在经过补偿之后目标节点到所有锚节点之间的参数感知都可以等同于视距传输,在这种情况下室内空间即使存在较多的障碍物也可以近似于自由空间传播环境,而在自由空间中的定位效果是最好的。
2、为达到上述目的, 本发明采用的技术方案为:
3、一种基于uwb测距的非视距效应补偿室内定位方法,包括如下步骤:
4、步骤(1)获取室内定位环境布局图,所述布局图包括室内环境的大小、内部设施摆放位置以及尺寸,用于分析非视距传输的来源以及可能产生非视距效应的目标节点所在的区域;
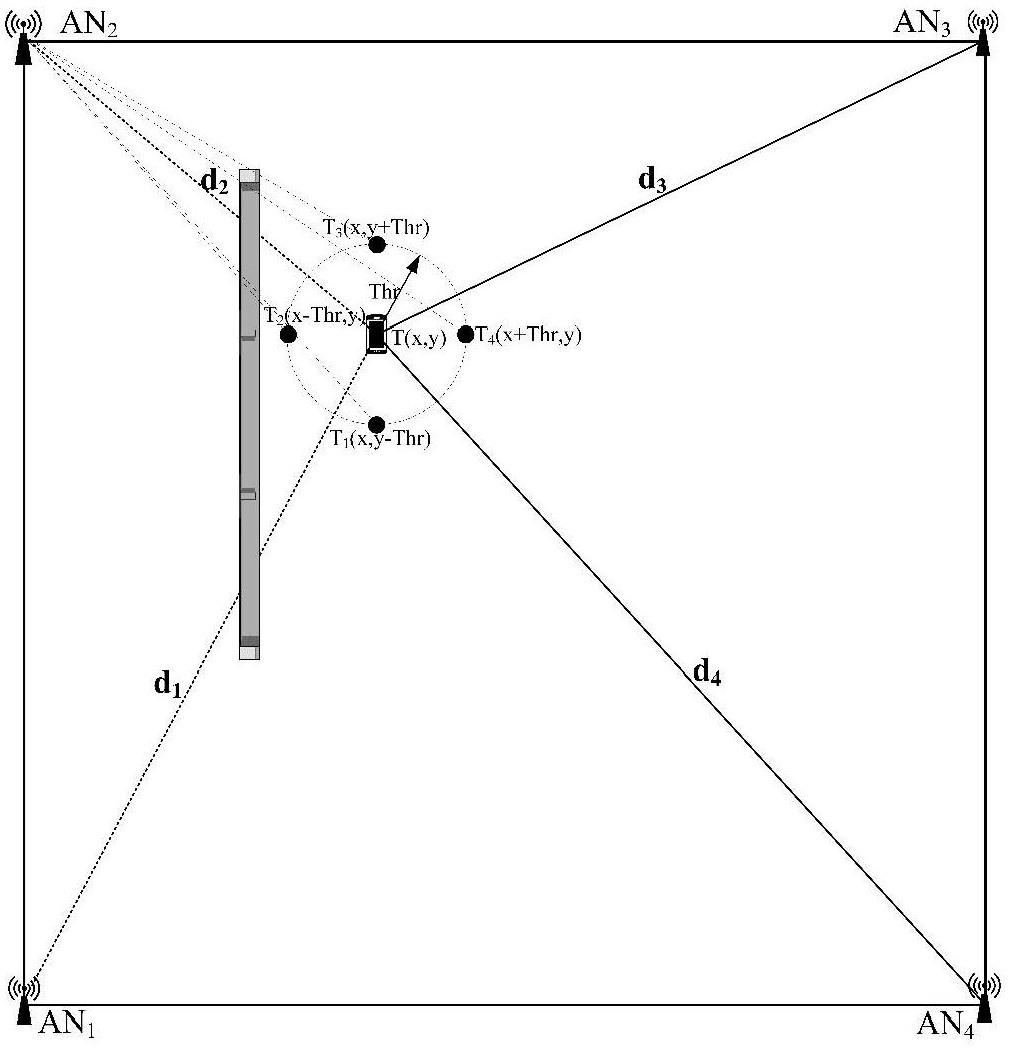
5、步骤(2)初始目标节点位置估计:当目标节点进入到室内区域时与事先布置好的锚节点进行信息交互,进而获得目标节点到每一个锚节点的距离信息,之后联合锚节点的位置坐标得到目标节点的初始位置估计;
6、步骤(3)非视距路径判别:根据步骤(2)获得的目标节点初始位置联合室内定位环境布局图以及uwb室内定位经验误差门限值判断目标节点到达某一锚节点的路径上是否存在非视距干扰;
7、步骤(4)非视距效应测距补偿:在正确的判别出目标节点到哪一个锚节点之间存在非视距效应后,对受到非视距影响的测距信息进行补偿;
8、步骤(5)修正后的目标节点位置估计:经过所述步骤(1)-步骤(4)之后,对信号传播过程中收到非视距影响的距离值进行修正补偿,然后将修正后的距离值和锚节点的位置坐标,带入到定位算法中得到精确的目标节点位置估计坐标。
9、进一步地,所述步骤(2)中,室内环境下求解目标节点的一般表达式如下:
10、(1)
11、其中, 表示的是求解出的目标节点位置,其中 表示估计出的目标节点位置的横坐标, 表示估计出的目标节点位置的纵坐标, 表示第 个锚节点位置横坐标, 表示第 个锚节点位置的纵坐标,表示最小二乘定位算法,表示锚节点的位置坐标, 代表根据无线信号所测得的目标节点到每个锚节点的距离信息。
12、进一步地,所述步骤(4)中,对受到非视距影响的测距信息进行补偿根据无线电信号在穿过不同障碍物时的速度减小原理进行;修正后的目标节点到锚节点的距离值为:
13、(2)
14、其中, 为修正后的目标节点到锚节点的距离值, 为修正之前测量得到的距离信息, 为墙体等障碍物的厚度, 为相对介电常数。
15、进一步地,所述步骤(5)中,修正后的目标节点位置坐标通过如下表达式获得:
16、(3)
17、其中, 为经过非视距补偿之后的修正距离值。
18、有益效果:
19、本发明提出了一种基于uwb测距的非视距效应补偿室内定位方法,通过对室内定位环境中可能存在的非视距路径进行补偿来抵消室内障碍物对定位精度的影响,从而获得更为精确的定位信息。在室内定位环境下基于uwb的测距结果会因为障碍物的存在而引起非视距误差,这是在室内环境中是对定位结果影响最大一种环境干扰,因此解决了非视距效应对于测距的影响也就可以解决室内定位中最大的难点。本发明正是从这一点出发,通过提出一种基于障碍物检测的非视距效应补偿方法来消除室内定位过程中非视距信息对于定位结果的影响。首先通过获取室内定位布局图来获取室内环境中障碍物的存在位置,之后对目标节点测量得到的距离信息进行检测来分辨出受到非视距影响的测距信息,对于存在非视距影响的测距信息则要进行逆向补偿,这样就使得目标节点到每一个锚节点的测距信息都是视距传输,在这种情况下室内空间即使存在较多的障碍物也可以近似于自由空间传播环境,即通过该方法消除了室内定位中的非视距测距信息,从而消除了在室内定位中会对定位性能影响最大的环境干扰,因此从室内定位理论上本方法与未进行非视距效应补偿相比可以获较大的定位性能提升。
技术特征:
1.一种基于uwb测距的非视距效应补偿室内定位方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种基于uwb测距的非视距效应补偿室内定位方法,其特征在于,所述步骤(2)中,室内环境下求解目标节点的一般表达式如下:
3.根据权利要求2所述的一种基于uwb测距的非视距效应补偿室内定位方法,其特征在于,所述步骤(4)中,对受到非视距影响的测距信息进行补偿根据无线电信号在穿过不同障碍物时的速度减小原理进行;修正后的目标节点到锚节点的距离值为:
4.根据权利要求3所述的一种基于uwb测距的非视距效应补偿室内定位方法,其特征在于,所述步骤(5)中,修正后的目标节点位置坐标通过如下表达式获得:
技术总结
本发明提出了一种基于UWB测距的非视距效应补偿室内定位方法,该方法可以用在大多数的基于到达时间的室内无线定位方法中,概括性的来说该方法的主要思想就是通过信号传播过程中的几何特性来鉴别可移动的目标节点在定位过程中是否接收到非视距的感知参数,并且要确定出目标节点是到哪一个锚节点之间存在非视距现象,对于存在非视距的测量信息要进行逆向补偿,而不存在非视距效应的感知参数则不需要进行补偿,从原理上讲在经过补偿之后目标节点到所有锚节点之间的参数感知都可以等同于视距传输,在这种情况下室内空间即使存在较多的障碍物也可以近似为自由空间传播环境,而在自由空间中的定位效果是最好的。
技术研发人员:潘军道,杨阔,汪亮,李卓诚,李子申,王宁波,楚焕鑫,蔚科
受保护的技术使用者:中国科学院空天信息创新研究院
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!