一种多移动目标定位方法、系统、电子设备及存储介质
本发明涉及多移动目标定位,尤其涉及一种多移动目标定位方法、系统、电子设备及存储介质。
背景技术:
1、传统粒子滤波算法:是一种基于贝叶斯滤波理论的目标跟踪方法,该算法首先通过对目标的状态进行初始化,包括目标的位置、速度、加速度等信息。然后,根据目标的运动模型对目标状态进行预测。在预测完成后,需要根据目标的观测信息对粒子进行权重更新,通常采用的方法是计算粒子与观测信息之间的距离,距离越小的粒子权重越大。在进行权重更新后,需要对粒子进行重采样,以保证粒子的多样性。最后,根据粒子的权重信息对目标的状态进行估计,通常采用的方法是对所有粒子的状态进行加权平均,以得到最终的目标状态估计值。
2、扩展卡尔曼滤波算法:扩展卡尔曼滤波(extended kalman filter,ekf)是一种基于卡尔曼滤波的非线性系统状态估计算法。它通过对非线性系统进行线性化处理,将非线性问题转化为线性问题,从而实现对系统状态的估计。扩展卡尔曼滤波的基本思想是通过对非线性系统进行一次一阶泰勒展开,将非线性函数近似为线性函数,从而将非线性问题转化为线性问题。具体地,扩展卡尔曼滤波将系统状态的估计分为两个步骤:预测和更新;预测步骤中,扩展卡尔曼滤波使用系统的状态转移方程和控制输入来预测下一个时刻的状态值和协方差矩阵。这个预测值是通过对上一个时刻的状态值进行线性变换得到的。更新步骤中,扩展卡尔曼滤波使用测量方程和测量结果来更新预测值。这个更新值是通过对预测值进行线性变换得到的。
3、现有技术还有一种基于最小二乘法和三边定位的超宽带室内定位方法。该定位方法通过利用所获取到的距离信息,采用改进的最小二乘和三边定位的联合算法对测距结果进行两步解算处理,从而得到更加精确的定位结果。其实现步骤包括:获取4个锚节点与标签间的距离信息;处理测距数据得到关于锚节点平面对称的2个坐标解;根据2个对称解得到标签精确的位置坐标;输出计算得到的标签位置坐标。该方法针对室内复杂环境利用超宽带技术提高了数据传输速率,将原有三边定位技术与最小二乘法进行结合,并对最小二乘法进行改进,提升了多元方程组求解位置坐标的效率。
4、现有技术中存在的以下缺陷:
5、1.粒子退化的问题:传统粒子滤波算法在长时间追踪目标的过程中,粒子的权值会出现退化现象,即只有很少一部分粒子的权值非常大,其他粒子的权值都很小,这会导致算法的估计结果不准确。
6、2.运动模型不准确的问题:定位算法的性能容易受到目标运动模型的影响,尤其是在这种多目标运动的情况下,各个目标的运动轨迹不同。
7、3.卡尔曼滤波需要进行系统状态的线性化处理,还需要对系统模型进行精细的设计和调整,将非线性问题转化为线性问题。这可能会导致估计误差较大的问题,也增加了算法的复杂度。
8、4.联合最小二乘和三边定位的超宽带室内定位方法,需要提前确定至少4个锚节点的坐标信息以及锚节点到标签间的距离信息,且利用距离与坐标建立矩阵方程组求解时,未考虑到测距误差影响,因而当标签存在频繁位置移动造成测距不准确时,会对移动目标最终定位结果产生较大偏差。
技术实现思路
1、本发明旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本发明提出一种多移动目标定位方法、系统、电子设备及存储介质,能够多移动目标定位。
2、一方面,本发明实施例提供了一种多移动目标定位方法,包括:
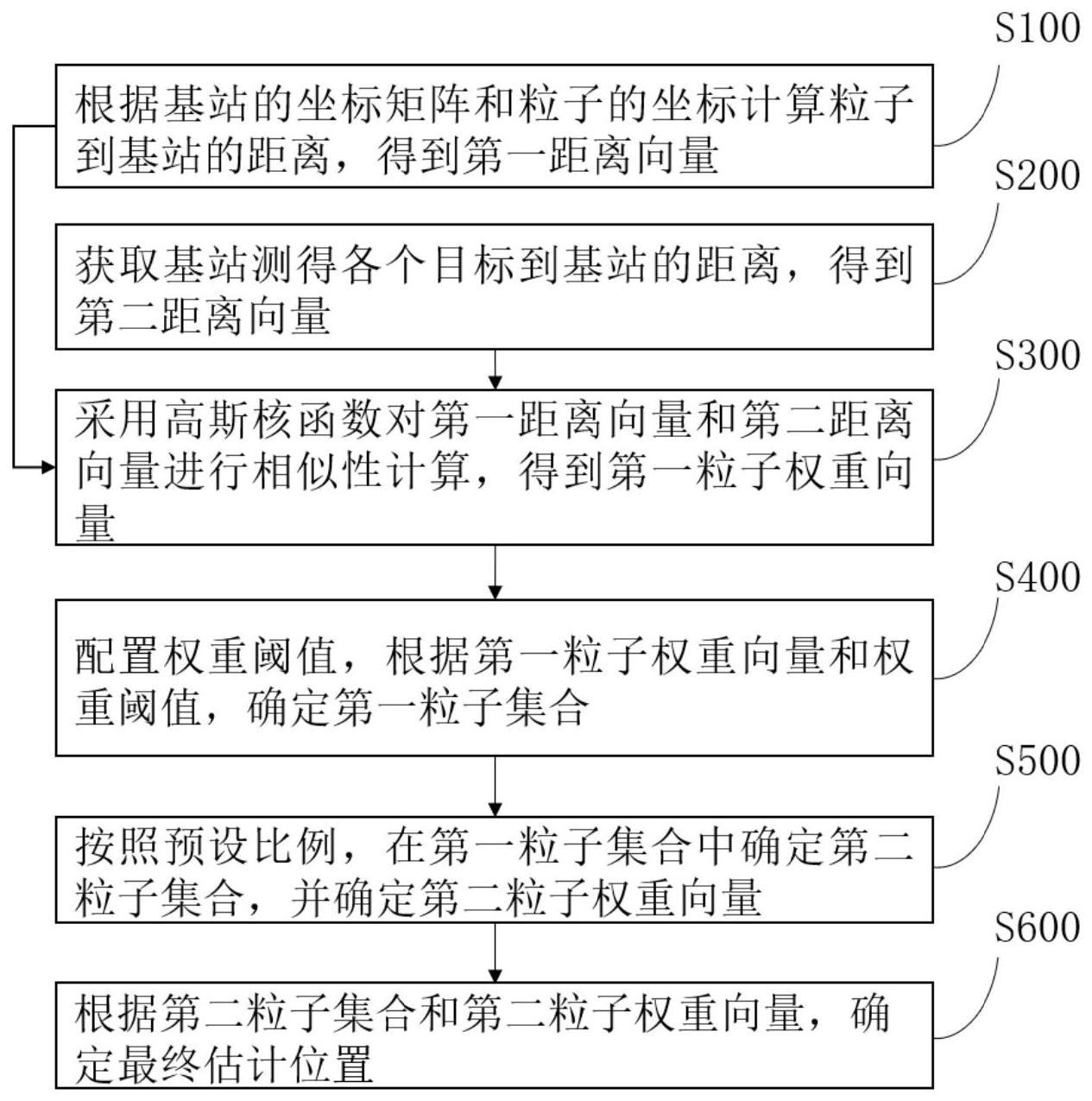
3、根据基站的坐标矩阵和粒子的坐标计算所述粒子到所述基站的距离,得到第一距离向量;其中,所述粒子为若干个;
4、获取所述基站测得各个目标到所述基站的距离,得到第二距离向量;
5、采用高斯核函数对所述第一距离向量和所述第二距离向量进行相似性计算,得到第一粒子权重向量;
6、配置权重阈值,根据所述第一粒子权重向量和所述权重阈值,确定第一粒子集合;
7、按照预设比例,在所述第一粒子集合中确定第二粒子集合,并确定第二粒子权重向量;
8、根据所述第二粒子集合和所述第二粒子权重向量,确定最终估计位置。
9、可选地,所述根据基站的坐标矩阵和粒子的坐标计算所述粒子到所述基站的距离,得到第一距离向量,包括:
10、计算每个粒子的坐标与所有基站坐标之间的欧几里得距离,得到第一距离向量;
11、其中,所述第一距离向量的计算公式为:
12、
13、其中,[particle_distancesi,j]表示第一距离向量的矩阵;xi表示第i个粒子的横坐标;yi表示第i个粒子的纵坐标;bxj表示第j个基站的横坐标矩阵;byj表示第j个基站的纵坐标矩阵。
14、可选地,所述采用高斯核函数对所述第一距离向量和所述第二距离向量进行相似性计算,得到第一粒子权重向量,包括:
15、计算第一距离向量和第二距离向量的距离差值;
16、根据所述距离差值和高斯核函数标准差,计算第一标准差;
17、对所述第一标准差进行指数运算,得到所述粒子的似然值向量;
18、根据每个所述粒子的所述似然值向量,确定第一粒子权重向量。
19、可选地,所述配置权重阈值,根据所述第一粒子权重向量和所述权重阈值,确定第一粒子集合,包括:
20、对所述第一粒子权重向量进行排序,得到第一结果向量;
21、在所有所述第一计算结果向量中确定大于权重阈值的粒子权重,得到第二结果向量;
22、根据所述第二结果向量确定第一粒子集合。
23、可选地,所述按照预设比例,在所述第一粒子集合中确定第二粒子集合,包括:
24、对第二结果向量进行排序,得到第三结果向量;其中,所述第二结果向量中每个元素值对应表示所述第一粒子集合中所述粒子的粒子权重;
25、获取配置的预定比例,按照所述预定比例在所述第三结果向量中确定第四结果向量;
26、根据所述第四结果向量确定第二粒子集合。
27、可选地,述根据所述第二粒子集合的第二粒子权重向量,确定最终估计位置,包括:将第二粒子集合的第二粒子权重向量重复为与所述第二粒子集合的粒子矩阵大小相同的矩阵,得到重复矩阵;
28、将所述第二粒子集合与第二粒子权重向量相乘,得到第一计算结果;
29、将所述第一计算结果与所述重复矩阵相乘,得到第二计算结果;
30、计算所述第二计算结果与第二粒子权重向量总和的商,得到最终估计位置。
31、可选地,所述最终估计位置的计算公式为:
32、[estimated_positions]=sum(weighted_particles)/sum(sorted_weights(idx))
33、其中,[estimated_positions]是最终估计位置的向量;sum(weighted_particles)是第二计算结果的总和,sum(sorted_weights(idx))是第二粒子权重向量总和;idx为粒子索引。
34、另一方面,本发明实施例还提供了一种多移动目标定位系统,包括:
35、第一模块,用于根据基站的坐标矩阵和粒子的坐标计算所述粒子到所述基站的距离,得到第一距离向量;其中,所述粒子为若干个;
36、第二模块,用于获取所述基站测得各个目标到所述基站的距离,得到第二距离向量;
37、第三模块,用于采用高斯核函数对所述第一距离向量和所述第二距离向量进行相似性计算,得到第一粒子权重向量;
38、第四模块,用于配置权重阈值,根据所述第一粒子权重向量和所述权重阈值,确定第一粒子集合;
39、第五模块,用于按照预设比例,在所述第一粒子集合中确定第二粒子集合,并确定第二粒子权重向量;
40、第六模块,用于根据所述第二粒子集合和所述第二粒子权重向量,确定最终估计位置。
41、另一方面,本发明实施例还提供了一种电子设备,包括:处理器以及存储器;存储器用于存储程序;处理器执行程序实现如上所述的方法。
42、另一方面,本发明实施例还提供了一种计算机存储介质,其中存储有处理器可执行的程序,处理器可执行的程序在由处理器执行时用于实现如上所述的方法。
43、本发明实施例具有如下有益效果:
44、根据基站的坐标矩阵和粒子的坐标计算所述粒子到所述基站的距离,得到第一距离向量;获取所述基站测得各个目标到所述基站的距离,得到第二距离向量;采用高斯核函数对所述第一距离向量和所述第二距离向量进行相似性计算,得到第一粒子权重向量;高斯核函数具有平滑性和局部性的特点,可以捕捉数据点之间的非线性关系。在本发明实施例中,权重反映了粒子对目标位置的可能性,采用高斯核函数来计算粒子的权重,进行相似度计算,从而提高粒子滤波算法的鲁棒性,提升了粒子权重计算的准确性,进一步提高了定位精度。此外,高斯核函数还可以降低噪声对目标定位的影响。
45、配置权重阈值,根据所述第一粒子权重向量和所述权重阈值,确定第一粒子集合;按照预设比例,在所述第一粒子集合中确定第二粒子集合,并确定第二粒子权重向量;在保留权重较大的粒子的基础上进一步保留一定比例的粒子,既保证了粒子的数目,能够进行后续的算法迭代,又减少了迭代的时间成本,提升了运行效率;根据所述第二粒子集合和第二粒子权重向量,确定最终估计位置。
46、总体而言,本发明实施例的方法能够准确计算粒子的权重,进行同时对多个目标进行定位,适配多个目标的运动模型,并且保留粒子的多样性。
- 还没有人留言评论。精彩留言会获得点赞!