基站板件调度方法、装置、设备及存储介质与流程
本技术涉及通信,尤其涉及一种基站板件调度方法、装置、设备及存储介质。
背景技术:
1、随着手机上网人数的逐年攀升,以及各种大型活动、会议等保障项目产生的需求,无线通信基站的负荷往往会随着每天不同时段而变化。在通信基站运营维护中,主控板、基带板等各种基站板件资源往往会出现紧缺的问题,因此,解决基站板件的调度问题至关重要。
2、现有技术中,通过机器学习的方式对基站负荷趋势进行预测,为基站板件调度工作提供指导依据。
3、然而,现有技术中为基站板件调度工作提供指导依据,仍然需要通过后台人工分析后,安排施工人员到现场拆装基带板实施扩容,不能解决因施工人手不足导致的基站板件调度效率低的问题。
技术实现思路
1、本技术提供一种基站板件调度方法、装置、设备及存储介质,用以解决因施工人手不足导致的基站板件调度效率低的技术问题。
2、第一方面,本技术提供一种基站板件调度方法,应用于服务器,包括:
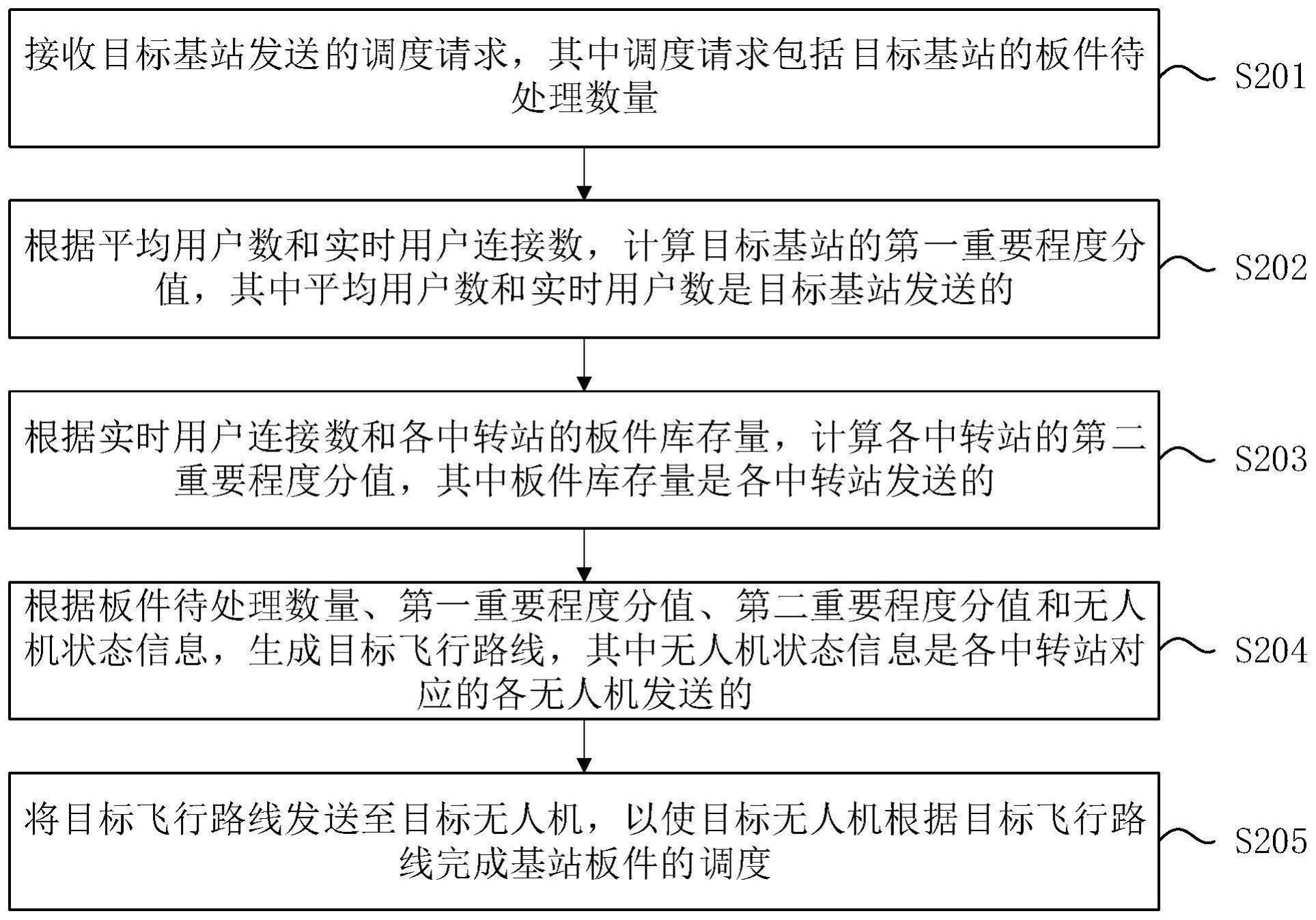
3、接收目标基站发送的调度请求,其中调度请求包括目标基站的板件待处理数量。
4、根据平均用户数和实时用户连接数,计算目标基站的第一重要程度分值,其中平均用户数和实时用户数是目标基站发送的。
5、根据实时用户连接数和各中转站的板件库存量,计算各中转站的第二重要程度分值,其中板件库存量是各中转站发送的。
6、根据板件待处理数量、第一重要程度分值、第二重要程度分值和无人机状态信息,生成目标飞行路线,其中无人机状态信息是各中转站对应的各无人机发送的。
7、将目标飞行路线发送至目标无人机,以使目标无人机根据目标飞行路线完成基站板件的调度。
8、可选地,如上所述的方法,所述无人机状态信息包括每公里飞行所需消耗的电量、电池总容量和理论飞行速度。相应地,根据板件待处理数量、第一重要程度分值、第二重要程度分值和无人机状态信息,生成目标飞行路线,包括:根据理论飞行速度,计算得到各无人机所需飞行时间。根据板件待处理数量,计算得到在目标基站的第一处理时间。根据板件待处理数量,计算得到在各中转站的第二处理时间。根据每公里飞行所需消耗的电量和电池总容量,计算得到各无人机的充电时间。根据第一重要程度分值、第二重要程度分值、无人机所需飞行时间、第一处理时间、第二处理时间和充电时间,计算得到各飞行路线的第三重要程度分值。将第三重要程度分值最大的飞行路线确定为目标飞行路线。
9、可选地,如上所述的方法,所述根据理论飞行速度,计算得到各无人机所需飞行时间的计算公式为:
10、
11、
12、式中,tf为各无人机所需飞行时间,sf为通过三维地图得出的各无人机的飞行总里程,vi为各无人机的理论飞行速度及方向,vws为实际风速的大小和方向,α为无人机理论飞行方向与实际风速的夹角,β为根据侧向风对飞行的影响,计算出的无人机理论飞行方向与实际飞行方向的夹角,n为实际风速不相同的路段,n为正整数。
13、根据板件待处理数量,计算得到在目标基站的第一处理时间的计算公式为:
14、
15、式中,tb为第一处理时间,m为板件待处理数量,tbi为第二预设周期内在目标基站各无人机的平均处理时间,k为第二预设周期的值,m为正整数。
16、根据板件待处理数量,计算得到在各中转站的第二处理时间的计算公式为:
17、
18、式中,ts为第二处理时间,m为板件待处理数量,tsi为第二预设周期内在各中转站无人机的平均处理时间,k为第二预设周期的值,m为正整数。
19、根据每公里飞行所需消耗的电量和电池总容量,计算得到第二指标值的计算公式为:
20、ce=cn-cp×s
21、式中,ce为第二指标值,cn为各无人机执行任务前的电池电量,cp为各无人机每公里飞行所需消耗的电量,s为执行任务的总里程。
22、若第二指标值小于0,则计算各无人机的充电时间的公式为:
23、
24、若第二指标值大于等于0且小于0.2,则计算各无人机的充电时间的公式为:
25、
26、式中,tc为各无人机的充电时间,ce为第二指标值,ca为各无人机的电池总容量,ic为充电时的电流。
27、若第二指标值大于0.2,则各无人机的充电时间为0。
28、根据第一重要程度分值、第二重要程度分值、无人机所需飞行时间、第一处理时间、第二处理时间和充电时间,计算得到各飞行路线的第三重要程度分值的计算公式如下:
29、
30、式中,tf为各无人机所需飞行时间,tb为第一处理时间,tc为各无人机的充电时间,ts为第二处理时间,iq为各中转站的第二重要程度分值,ia为目标基站的第一重要程度分值。
31、可选地,如上所述的方法,还包括:若任一中转站的板件库存量小于预设时刻的任一中转站的板件库存量,则获取任一目标基站的基站板件需要拆卸的数量。根据任一目标基站的位置和三维地图得出目标飞行路线。将目标飞行路线发送至任一中转站对应的无人机,以使无人机根据目标飞行路线完成基站板件的拆卸。
32、可选地,如上所述的方法,所述根据平均用户数和实时用户连接数,计算目标基站的第一重要程度分值的公式为:
33、ia=0.3up+0.7un
34、式中,ia为目标基站的第一重要程度分值,up为平均用户数,un为实时用户连接数。
35、可选地,如上所述的方法,所述根据实时用户连接数和各中转站的板件库存量,计算各中转站的第二重要程度分值的公式为:
36、
37、式中,iq为各中转站的第二重要程度分值,un为实时用户连接数,nq为各中转站的板件库存量。
38、第二方面,本技术提供一种基站板件调度方法,应用于任一目标基站,包括:
39、确定目标基站的板件待处理数量。
40、生成调度请求,其中调度请求包括目标基站的板件待处理数量。
41、发送调度请求至服务器,以使服务器根据平均用户数和实时用户连接数,计算目标基站的第一重要程度分值,其中平均用户数和实时用户数是目标基站发送的;根据实时用户连接数和各中转站的板件库存量,计算各中转站的第二重要程度分值,其中板件库存量是各中转站发送的;根据板件待处理数量、第一重要程度分值、第二重要程度分值和无人机状态信息,生成目标飞行路线,其中无人机状态信息是各中转站对应的各无人机发送的;将目标飞行路线发送至目标无人机,以使目标无人机根据目标飞行路线完成基站板件的调度。
42、可选地,如上所述的方法,所述确定目标基站的板件待处理数量,包括:获取现有小区数量、待新增小区数量、现有基站板件数量和基站板件能够支撑小区建立的最大支撑量。根据现有小区数量、待新增小区数量、现有基站板件数量和最大支撑量,计算得到第一指标值。若第一指标值大于0,且第一指标值与最大支撑量的比值为正整数,则通过第一公式计算,得到板件待处理数量。若第一指标值大于0,且第一指标值与最大支撑量的比值不为正整数,则通过第二公式计算,得到板件待处理数量。若第一指标值小于0,但第一指标值的绝对值大于最大支撑量,且第一指标值与最大支撑量的比值为负整数,则通过第三公式计算,得到板件待处理数量。若第一指标值小于0,但第一指标值的绝对值大于最大支撑量,且第一指标值与最大支撑量的比值不为负整数,则通过第四公式计算,得到板件待处理数量。
43、可选地,如上所述的方法,所述根据现有小区数量、待新增小区数量、现有基站板件数量和最大支撑量,计算得到第一指标值的公式为:
44、nw=nn+na-nbase×nn
45、式中,nw为第一指标值,nn为现有小区数量,na为待新增小区数量,nbase为最大支撑量,nn为现有基站板件数量。
46、第一公式为:
47、
48、第二公式为:
49、
50、第三公式为:
51、
52、第四公式为:
53、
54、式中,nr为板件待处理数量,nw为第一指标值,nbase为最大支撑量。
55、第三方面,本技术提供一种基站板件调度装置,应用于服务器,包括:
56、请求接收模块,用于接收目标基站发送的调度请求,其中调度请求包括目标基站的板件待处理数量。
57、第一计算模块,用于根据平均用户数和实时用户连接数,计算目标基站的第一重要程度分值,其中平均用户数和实时用户数是目标基站发送的。
58、第二计算模块,用于根据实时用户连接数和各中转站的板件库存量,计算各中转站的第二重要程度分值,其中板件库存量是各中转站发送的。
59、路线生成模块,用于根据板件待处理数量、第一重要程度分值、第二重要程度分值和无人机状态信息,生成目标飞行路线,其中无人机状态信息是各中转站对应的各无人机发送的。
60、路线发送模块,用于将目标飞行路线发送至目标无人机,以使目标无人机根据目标飞行路线完成基站板件的调度。
61、第四方面,本技术提供另一种基站板件调度装置,应用于任一目标基站,包括:
62、数量确定模块,用于确定目标基站的板件待处理数量。
63、请求生成模块,用于生成调度请求,其中调度请求包括目标基站的板件待处理数量。
64、请求发送模块,用于发送调度请求至服务器,以使服务器根据平均用户数和实时用户连接数,计算目标基站的第一重要程度分值,其中平均用户数和实时用户数是目标基站发送的。根据实时用户连接数和各中转站的板件库存量,计算各中转站的第二重要程度分值,其中板件库存量是各中转站发送的。根据板件待处理数量、第一重要程度分值、第二重要程度分值和无人机状态信息,生成目标飞行路线,其中无人机状态信息是各中转站对应的各无人机发送的。将目标飞行路线发送至目标无人机,以使目标无人机根据目标飞行路线完成基站板件的调度。
65、第五方面,本技术提供一种服务设备,包括:至少一个处理器和存储器;
66、所述存储器存储计算机执行指令;
67、所述至少一个处理器执行所述存储器存储的计算机执行指令,使得所述至少一个处理器执行如上第一方面以及第一方面各种可能的设计所述的基站板件调度方法。
68、第六方面,本技术提供一种基站设备,包括:至少一个处理器和存储器;
69、所述存储器存储计算机执行指令;
70、所述至少一个处理器执行所述存储器存储的计算机执行指令,使得所述至少一个处理器执行如上第二方面以及第二方面各种可能的设计所述的基站板件调度方法。
71、第七方面,本技术提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机执行指令,当处理器执行所述计算机执行指令时,实现如上第一方面以及第一方面各种可能的设计所述的基站板件调度方法。
72、第八方面,本技术提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机执行指令,当处理器执行所述计算机执行指令时,实现如上第二方面以及第二方面各种可能的设计所述的基站板件调度方法。
73、本技术提供的基站板件调度方法、装置、设备及存储介质,响应于基站的调度请求,服务器通过获取基站和各中转站的相关数据,计算出的目标飞行路线并将目标飞行路线发送至无人机,由无人机执行基站板件的调度,降低了现场维护人员的人力成本,从而提高了基站板件的调度效率。
- 还没有人留言评论。精彩留言会获得点赞!