航空相机俯角单框架匀速扫描成像起步控制方法及系统
本发明涉及航空相机成像控制,尤其涉及航空相机俯角单框架匀速扫描成像起步控制方法及系统。
背景技术:
1、航空相机成像是获取地面信息的一种重要技术手段,其具备机动性强、时效性好、分辨率高等诸多优势,在情报获取、灾害救援、农林测绘等军民两用方面有着广泛的应用。航空相机根据采用的ccd类型及成像方式的不同,大致可分为面阵框幅式、线阵推扫式和线阵摆扫式等几类;其中,线阵摆扫式相机通过线阵ccd在垂直于载机航向方向倾斜摆扫成像,并保证相邻各幅图像之间具有一定的重叠率,通过后期图像拼接处理而获取成像区域的完整图像,从而有效地扩大相机视场。
2、在这种摆扫成像过程中,通常采用垂直于载机航向的相机俯角框架以“之”字形或“弓”字形的匀速摆扫工作方式来实现。传统的实现方式是在准备拍照指令下,俯角框架以位置伺服方式运动到扫描行起始角,在拍照指令下,俯角框架以速度伺服方式按给定的角速度指令,从行起始角起步扫描到行结束角,显然在每行起拍阶段,俯角框架并未达到匀速稳定状态,动态成像容易产生畸变或拉缝,也给后期图像处理带来一定困难。
3、因此,针对线阵摆扫式航空相机,有必要采用有效的扫描成像起步控制方法,保证航空相机动态扫描成像品质和提高图像后期处理效率。
技术实现思路
1、本申请的目的是提供航空相机俯角单框架匀速扫描成像起步控制方法及系统,旨在解决上述问题。
2、为实现上述目的,本申请提供如下技术方案:
3、本申请提供航空相机俯角单框架匀速扫描成像起步控制方法,包括:
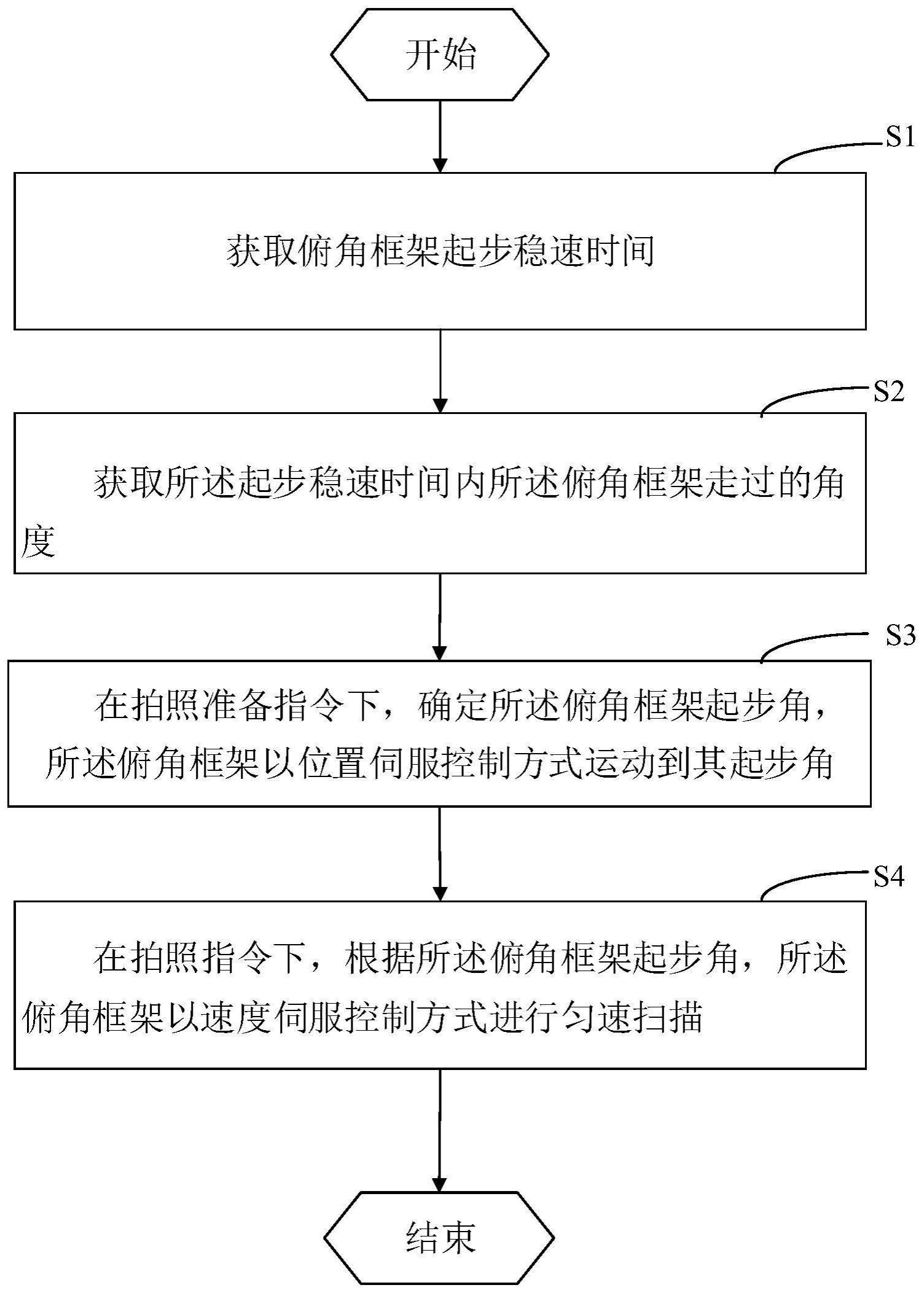
4、s1:获取俯角框架起步稳速时间δt;
5、s2:获取所述起步稳速时间内所述俯角框架走过的角度δθ;
6、s3:在拍照准备指令下,确定所述俯角框架起步角θ0,所述俯角框架以位置伺服控制方式运动到其起步角θ0;
7、s4:在拍照指令下,根据所述俯角框架起步角θ0,所述俯角框架以速度伺服控制方式进行匀速扫描。
8、进一步的,所述步骤s1中,包含下述步骤:
9、所述俯角框架以速度伺服控制方式,记录所述俯角框架从零速v0起步阶跃到匀速vref的起步稳速时间δt正,以及所述俯角框架从零速v0起步阶跃到匀速-vref的起步稳速时间δt负;
10、其中定义v0=0,vref>0为俯角框架正向扫描任务指令角速度,则-vref为俯角框架负向扫描任务指令角速度,δt正>0为正向扫描稳速时间δt,δt负>0为负向扫描稳速时间δt。
11、进一步的,所述步骤s2中,包含下述步骤:
12、所述俯角框架以速度伺服控制方式,记录俯角框架从零速v0起步阶跃到匀速vref走过的角度δθ正,以及俯角框架从零速v0起步阶跃到匀速-vref走过的角度δθ负;
13、其中定义,v0=0,vref>0为俯角框架正向扫描任务指令角速度,则-vref为俯角框架负向扫描任务指令角速度,δθ正>0为正向扫描稳速时俯角框架走过的角度δθ,δθ负>0为负向扫描稳速时俯角框架走过的角度δθ。
14、进一步的,所述步骤s1中,包含下述步骤:
15、所述俯角框架从零速v0起步阶跃到匀速vref或-vref的起步稳速时间中,根据成像控制精度选取稳速指标,若选取速度95%指标,则稳速时间δt正和δt负分别是俯角框架从零速v0分别起步阶跃到匀速95%*vref和-95%*vref的起步稳速对应时间。
16、进一步的,所述步骤s3中,包含下述步骤:
17、步骤s31:根据俯角框架匀速扫描拍照单条带内的起始角θ1和结束角θ2,确定俯角框架起步角θ0,若θ1<θ2时,定义俯角框架为正向扫描,则俯角框架起步角θ0=θ1-δθ正;若θ1>θ2时,定义俯角框架为负向扫描,则俯角框架起步角θ0=θ1+δθ负;
18、步骤s32:俯角框架以位置伺服控制方式运动到起步角θ0。
19、进一步的,所述所述步骤s4中,包括下述步骤:
20、步骤s41:延迟时间δt正或δt负,相机在此扫描行拍第一幅照片;
21、步骤s42:若θ1<θ2时,俯角框架为正向扫描,俯角框架则从起步角θ0从零速v0起步阶跃加速到vref,耗时δt正历经δθ正到达起始角θ1并实现匀速vref,相机在此行拍第一幅照片,俯角框架从起始角θ1以匀速vref扫描到结束角θ2,相机根据重叠率连续间隔拍摄此行后续照片;
22、步骤s43:若θ1>θ2时,俯角框架为负向扫描,俯角框架则从起步角θ0从零速起步阶跃加速到-vref,耗时δt负历经δθ负到达起始角θ1并实现匀速-vref,相机在此行拍第一幅照片,俯角框架从起始角θ1以匀速-vref扫描到结束角θ2,相机根据重叠率连续间隔拍摄此行后续照片。
23、进一步的,还包括下述步骤:
24、步骤s5中,循环交替执行步骤s3和步骤s4。
25、还提供航空相机俯角单框架匀速扫描成像起步控制系统,具体内容包括:
26、时间获取模块:获取俯角框架起步稳速时间δt;
27、角度获取模块:获取所述起步稳速时间内所述俯角框架走过的角度δθ;
28、控制模块:在拍照准备指令下,确定所述俯角框架起步角θ0,所述俯角框架以位置伺服控制方式运动到其起步角θ0;
29、扫描模块:在拍照指令下,根据所述俯角框架起步角θ0,所述俯角框架以速度伺服控制方式进行匀速扫描。
30、本申请提供了航空相机俯角单框架匀速扫描成像起步控制方法及系统,具有以下有益效果:
31、本申请可以使航空相机动态扫描成像作业中,俯角框架到达每行曝光起始角时,俯角框架角速度正好达到匀速稳定状态,从而保证航空相机动态扫描成像品质和提高图像后期处理效率。该方法适用于航空相机动态扫描成像与控制,尤其适用于航空相机俯角单框架匀速扫描成像起步控制。
技术特征:
1.航空相机俯角单框架匀速扫描成像起步控制方法,其特征在于,包括:
2.根据权利要求1所述的航空相机俯角单框架匀速扫描成像起步控制方法,其特征在于,所述步骤s1中,包含下述步骤:
3.根据权利要求1所述的航空相机俯角单框架匀速扫描成像起步控制方法,其特征在于,所述步骤s2中,包含下述步骤:
4.根据权利要求1或2所述的航空相机俯角单框架匀速扫描成像起步控制方法,其特征在于,所述步骤s1中,包含下述步骤:
5.根据权利要求1所述的航空相机俯角单框架匀速扫描成像起步控制方法,其特征在于,所述步骤s3中,包含下述步骤:
6.根据权利要求1所述的航空相机俯角单框架匀速扫描成像起步控制方法,其特征在于,所述所述步骤s4中,包括下述步骤:
7.根据权利要求1所述的航空相机俯角单框架匀速扫描成像起步控制方法,其特征在于,还包括下述步骤:
8.根据权利要求1所述的航空相机俯角单框架匀速扫描成像起步控制方法的系统,其特征在于,包括:
技术总结
本申请公开了航空相机俯角单框架匀速扫描成像起步控制方法及系统,运用于航空相机成像控制技术领域,其方法包括:获取俯角框架起步稳速时间Δt;获取所述起步稳速时间内所述俯角框架走过的角度Δθ;在拍照准备指令下,确定所述俯角框架起步角θ<subgt;0</subgt;,所述俯角框架以位置伺服控制方式运动到其起步角θ<subgt;0</subgt;;在拍照指令下,根据所述俯角框架起步角θ<subgt;0</subgt;,所述俯角框架以速度伺服控制方式进行匀速扫描;可以使航空相机动态扫描成像作业中,俯角框架到达每行曝光起始角时,俯角框架角速度正好达到匀速稳定状态,从而保证航空相机动态扫描成像品质和提高图像后期处理效率。
技术研发人员:王元超,杨永明,匡海鹏
受保护的技术使用者:中国科学院长春光学精密机械与物理研究所
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!