车辆及其控制方法与流程
本发明涉及车辆及其控制方法,更具体地,涉及一种配备有前方防撞辅助(forward collision-avoidance assist,fca)功能的车辆及其控制方法。
背景技术:
1、车辆可以配备高级驾驶员辅助系统(advanced driver assistance system,adas),以避免在道路上行驶时与其它车辆发生各种碰撞。
2、作为adas的一种功能的前方防撞辅助(fca)功能是防止与检测到的位于车辆前方的其它车辆碰撞的功能,并且通过设置在车辆中的摄像头和雷达,考虑与其它车辆的距离关系和车道线关系来避免碰撞。
3、常规的fca功能的问题在于,在没有车道线的道路上无法进行正常操作,或者如果只考虑与其它车辆碰撞的估计时间而不考虑车道线,则在不需要fca的情况下会发生制动控制。
技术实现思路
1、因此,本发明的一方面提供一种控制车辆的方法,其在没有车道线的道路上正常操作前方防撞辅助(fca)功能并防止灵敏控制。
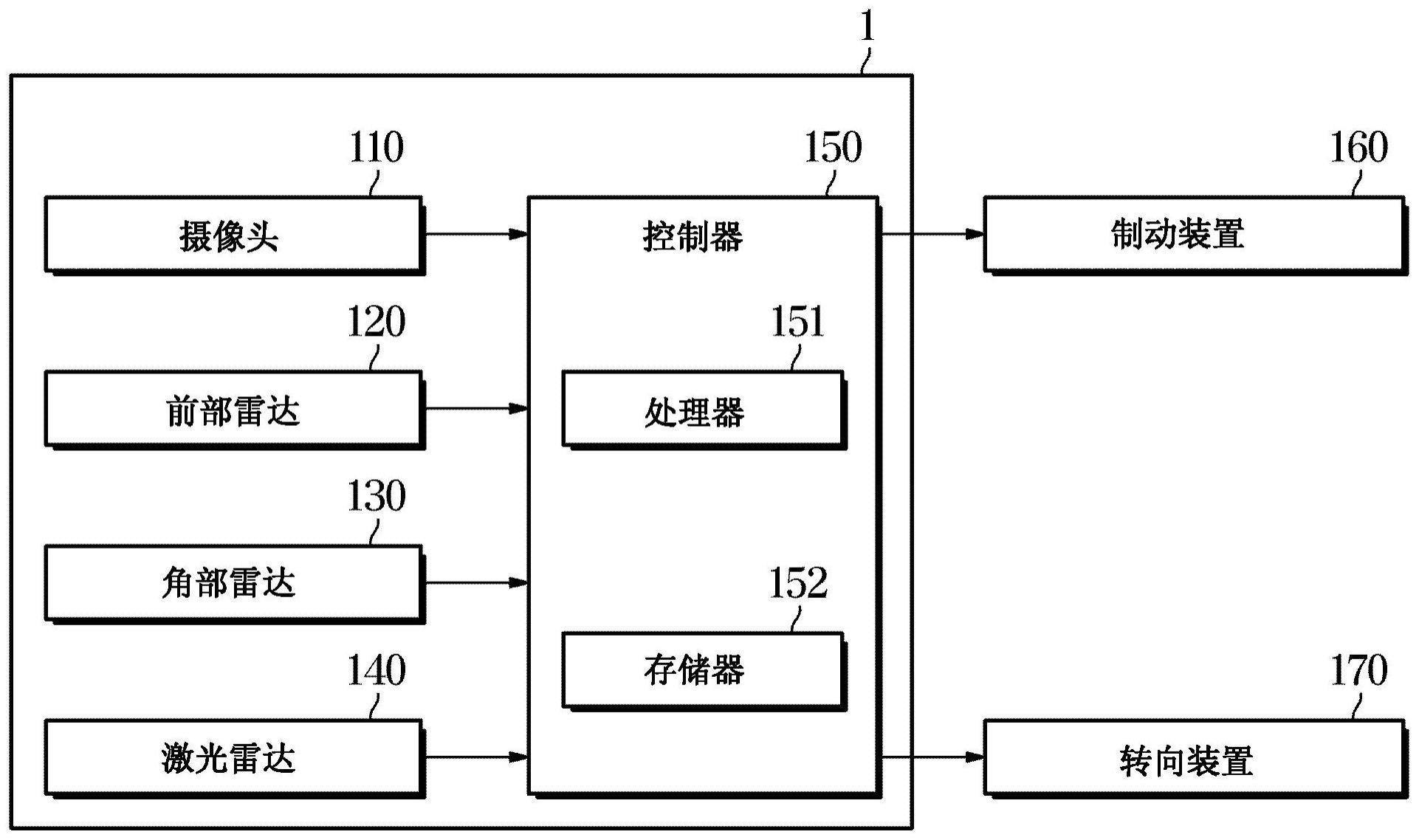
2、根据本发明的一个方面,车辆包括:摄像头,其安装在车辆中以具有车辆的外部视场并且被配置为获取用于检测外部视场中的车道线和对象的图像数据;雷达,其安装在车辆中以具有车辆的外部视场并且被配置为获取用于在外部视场中检测对象的雷达数据;以及控制器,其包括至少一个处理器,处理器被配置为处理图像数据和雷达数据并且被配置成基于处理结果控制制动装置,其中,在未检测到车道线的状态下,控制器检测车辆的行进直线度和对象的行进直线度,并且当车辆的行进直线度和对象的行进直线度为特定水平以上并且对象与车辆的虚拟路径相交的时间为特定时间以下并保持预设第一时间以上时,控制制动装置,使得执行前方防撞辅助(fca)功能,
3、控制器可以基于车辆的转向角、车辆的横摆角速度和车辆的横向移动量中的至少一个来计算作为车辆的行进直线度的指数的第一指数,当车辆的行进直线度大于或等于特定水平时,将第一指数计算为1,并且,当车辆的行进直线度小于特定水平时,将第一指数计算为0。
4、控制器可以基于对象的航向角和对象相对于车辆的横向位置中的至少一个来计算作为对象的行进直线度的指数的第二指数,当对象的行进直线度大于或等于特定水平时,将第二指数计算为1,并且当对象的行进直线度小于特定水平时,将第二指数计算为0。
5、当满足第一条件(其中,对象与车辆的虚拟路径相交的时间为特定时间以下并且保持预设第一时间以上)并满足第二条件(其中,车辆的虚拟路径与对象的虚拟路径重叠的横向重叠区域的面积为预设大小以上)时,控制器可以将作为车辆和对象之间碰撞可能性的指数的第三指数计算为1,并且,当第一条件和第二条件中的至少一个不满足时,将第三指数计算为0。
6、当第一指数、第二指数和第三指数中的至少一个为0时,控制器可以控制前方防撞辅助(fca)功能不执行。
7、当检测到车道线,在对象在车道中心行进的同时检测到与车道相交的对象,并且对象与车辆的虚拟路径相交的时间为特定时间以下并且保持预设第二时间以上时,控制器可以增加制动装置的制动量。
8、控制器可以计算第四指数,当在对象在车道中心行进的同时检测到与车道相交的对象时将第四指数计算为1,并且当没有检测到与车道相交的对象时将第四指数计算为0。
9、控制器可以计算作为车辆与对象之间碰撞可能性的指数的第五指数,当满足第三条件(其中,车辆和对象位于同一车道的时间为特定时间以上)并且满足第四条件(其中,对象与车辆的车道相交的时间为特定时间以下并且为预设第二时间以上)时,将第五指数计算为1,并且,当第三条件和第四条件中的至少一个不满足时,将第五指数计算为0。
10、当第四指数和第五指数中的至少一个为0时,控制器可以以预先存储的制动量输出制动量。
11、控制器可以将预设第二时间设置为大于预设第一时间。
12、根据本发明的另一方面,一种控制车辆的方法包括:获取用于检测车道线和对象的图像数据和用于检测对象的雷达数据;处理图像数据和雷达数据;在未检测到车道线的状态下检测车辆的行进直线度和对象的行进直线度;以及基于车辆的行进直线度和对象的行进直线性为特定水平以上并且对象与车辆的虚拟路径相交的时间为特定时间以下并且保持预设第一时间以上,控制制动装置,使得执行前方防撞辅助(fca)功能。
13、根据另一方面的控制车辆的方法还可以包括基于车辆的转向角、车辆的横摆角速度和车辆的横向移动量中的至少一个来计算作为车辆的行进直线度的指数的第一指数,当车辆的行进直线度大于或等于特定水平时,将第一指数计算为1,并且,当车辆的行进直线度小于特定水平时,将第一指数计算为0。
14、根据另一方面的控制车辆的方法可以包括基于对象的航向角和对象相对于车辆的横向位置中的至少一个来计算作为对象的行进直线度的指数的第二指数、当对象的行进直线度大于或等于特定水平时,将第二指数计算为1,并且,当对象的行进直线度小于特定水平时,将第二指数计算为0。
15、根据另一方面的控制车辆的方法还可以包括计算作为车辆与对象之间碰撞可能性的指数的第三指数,当第一条件(其中,对象与车辆的虚拟路径相交的时间为特定时间以下并且保持预设第一时间以上)并满足第二条件(其中,车辆的虚拟路径与对象的虚拟路径重叠的横向重叠区域的面积为预设大小以上)时,控制器可以将作为车辆和对象之间碰撞可能性的指数的第三指数计算为1,并且,当第一条件和第二条件中的至少一个不满足时,将第三指数计算为0。
16、根据另一方面的控制车辆的方法还可以包括当第一指数、第二指数和第三指数中的至少一个为0时,控制前方防撞辅助(fca)功能不执行。
17、根据另一方面的控制车辆的方法还可以包括,当检测到车道线,在车辆在车道线之间的车道中心行进的同时检测到与车道相交的对象,并且对象与车辆的车道相交的时间为特定时间以下并且保持预设第二时间以上时,增加制动装置的制动量。
18、根据另一方面的控制车辆的方法还可以包括计算第四指数,其中当在车辆在车道线之间的车道中心行进的同时检测到与车道相交的对象时,将第四指数计算为1,并且当没有检测到与车道相交的对象时,将第四指数计算为0。
19、根据另一方面的控制车辆的方法还可以包括计算作为车辆与对象之间碰撞可能性的指数的第五指数,当满足第三条件(其中,车辆和对象位于同一车道的时间为特定时间以上)并且满足第四条件(其中,对象与车辆的车道相交的时间为特定时间以下并且为预设第二时间以上)时,将第五指数计算为1,并且,当第三条件和第四条件中的至少一个不满足时,将第五指数计算为0。
20、根据另一方面的控制车辆的方法还可以包括当第四指数和第五指数中的至少一个为0时,以预先存储的制动量输出制动量。
21、预设第二时间可以被设置为大于预设第一时间。
技术特征:
1.一种车辆,包括:
2.根据权利要求1所述的车辆,其中,所述控制器被配置为:
3.根据权利要求2所述的车辆,其中,所述控制器被配置为:
4.根据权利要求3所述的车辆,其中,所述控制器被配置为:
5.根据权利要求4所述的车辆,其中,所述控制器被配置为:基于第一指数、第二指数和第三指数中的至少一个为0,阻止前方防撞辅助fca功能的执行。
6.根据权利要求5所述的车辆,其中,所述控制器被配置为:基于检测到车道线,在所述车辆在车道线之间的车道中心行进的同时检测到与车道相交的对象,并且所述对象与所述车辆的车道相交的时间小于或等于特定时间并且保持大于或等于预设第二时间,增加制动装置的制动量。
7.根据权利要求6所述的车辆,其中,所述控制器被配置为:
8.根据权利要求7所述的车辆,其中,所述控制器被配置为:
9.根据权利要求8所述的车辆,其中,所述控制器被配置为:基于第四指数和第五指数中的至少一个为0,以预先存储的量输出所述制动量。
10.根据权利要求9所述的车辆,其中,所述控制器被配置为将所述预设第二时间设置为大于所述预设第一时间。
11.一种控制车辆的方法,包括以下步骤:
12.根据权利要求11所述的方法,还包括:
13.根据权利要求12所述的方法,还包括:
14.根据权利要求13所述的方法,还包括:
15.根据权利要求14所述的方法,还包括:基于第一指数、第二指数和第三指数中的至少一个为0,阻止执行前方防撞辅助fca功能。
16.根据权利要求15所述的方法,还包括:基于检测到车道线,在所述车辆在车道线之间的车道中心行进的同时检测到与车道相交的对象,以及所述对象与所述车辆的所述车道相交的时间小于或等于特定时间并且保持大于或等于预设第二时间,增加制动装置的制动量。
17.根据权利要求16所述的方法,还包括:
18.根据权利要求17所述的方法,还包括:
19.根据权利要求18所述的方法,还包括:基于第四指数和第五指数中的至少一个为0,以预先存储的量输出所述制动量。
20.根据权利要求19所述的方法,其中,所述预设第二时间被设置为大于所述预设第一时间。
技术总结
提出了车辆及其控制方法。本发明提供一种车辆,包括:被配置为拍摄车辆外部的摄像头、被配置为检测车辆外部的对象的雷达,以及控制器,所述控制器被配置为基于从摄像头输出的图像数据和从雷达输出的雷达数据获取车辆的虚拟路径,并基于保持对象与车辆的虚拟路径相交的时间来执行前方防撞制动。
技术研发人员:李相敏,全大奭,成东炫,安泰根,魏炯钟,李俊昊,金应瑞,权容奭
受保护的技术使用者:现代自动车株式会社
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!