车辆控制方法、装置、电子设备和存储介质与流程
本公开涉及车辆,尤其涉及智能车载,具体涉及一种车辆控制方法、装置、电子设备和存储介质。
背景技术:
1、随着人们生活水平的提高和道路交通的快速发展,越来越多的人选择驾驶机动车出行,而由于主驾驶的不良驾驶行为,例如分心驾驶、疲劳驾驶等,直接或者间接导致交通意外事故频繁发生。如何减少因为主驾驶疲劳驾驶等造成的意外事故发生是一个亟待解决的问题。
技术实现思路
1、本公开提供了一种车辆控制方法、装置、电子设备和存储介质。
2、根据本公开的第一方面,提供了一种车辆控制方法,包括:
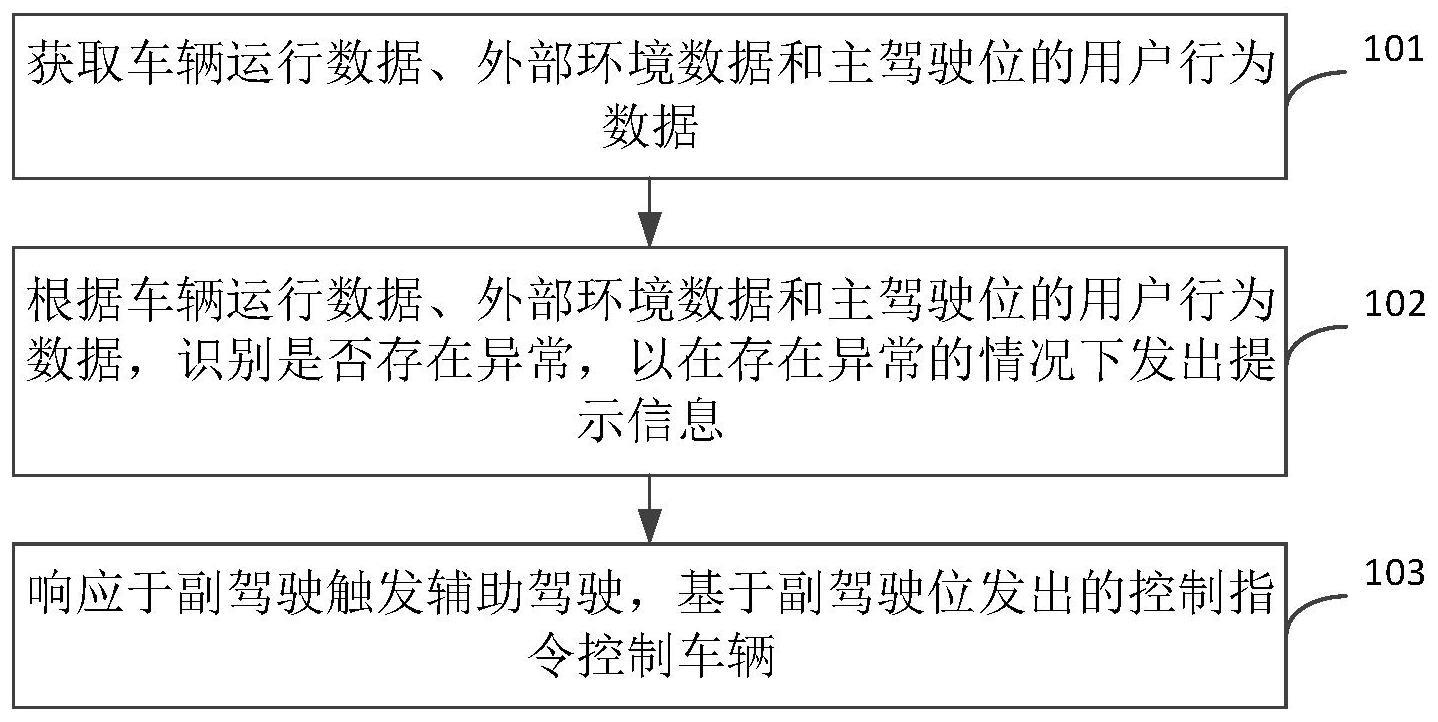
3、获取车辆运行数据、外部环境数据和主驾驶位的用户行为数据;
4、根据所述车辆运行数据、外部环境数据和主驾驶位的用户行为数据,识别是否存在异常,以在存在异常的情况下发出提示信息;
5、响应于副驾驶触发辅助驾驶,基于副驾驶位发出的控制指令控制车辆。
6、可选的,所述提示信息用于提醒副驾驶触发辅助驾驶;
7、所述根据所述车辆运行数据、外部环境数据和主驾驶位的用户行为数据,判断是否存在异常,以在存在异常的情况下发出提示信息,包括:
8、根据所述车辆运行数据和所述外部环境数据,识别车辆行驶是否存在异常;
9、在识别到车辆行驶存在异常的情况下,根据所述主驾驶位的用户行为数据,识别驾驶状态是否正常;
10、在识别到所述驾驶状态存在异常的情况下,发出用于提醒副驾驶触发辅助驾驶的提示信息。
11、可选的,所述根据所述车辆运行数据和外部环境数据,识别车辆行驶是否存在异常,包括:
12、对所述外部环境数据中采集的限速标志进行识别,以确定速度上限和/或速度下限;
13、在所述车辆运行数据中采集的车辆速度大于所述速度上限的情况下,确定所述车辆超速行驶;
14、在所述车辆运行数据中采集的车辆速度小于所述速度下限的情况下,确定所述车辆慢速行驶;
15、在确定所述车辆超速行驶或所述车辆慢速行驶的情况下,识别到所述车辆行驶存在异常。
16、可选的,所述根据所述车辆运行数据和外部环境数据,识别车辆行驶是否存在异常,包括:
17、对所述外部环境数据中采集的道路图像进行车道线识别,以确定所述车道线在所述道路图像中的位置;
18、根据所述车道线在所述道路图像中的位置,确定车辆相对于所述车道线的位置;
19、根据所述车辆相对于所述车道线的位置,识别车辆行驶是否存在异常。
20、可选的,所述根据所述车辆运行数据和外部环境数据,识别车辆行驶是否存在异常,包括:
21、对所述外部环境数据中采集的道路图像进行车道线识别,以确定所述车道线在所述道路图像中的位置;
22、根据所述车道线在所述道路图像中的位置,确定左右车道线与所述道路图像底边之间的夹角;
23、在所述左右车道线与所述道路图像底边之间的夹角的差的绝对值小于或等于预设阈值的情况下,识别到车辆行驶正常;
24、在所述左右车道线与所述道路图像底边之间的夹角的差的绝对值大于所述预设阈值的情况下,识别到车辆行驶存在异常。
25、可选的,所述根据所述车辆运行数据和外部环境数据,识别车辆行驶是否存在异常,包括:
26、对所述外部环境数据中采集的道路图像进行车道线识别,以确定所述车道线在所述道路图像中的位置;
27、根据所述车道线在所述道路图像中的位置,确定左右车道线与所述道路图像底边之间的夹角;
28、在所述左右车道线与所述道路图像底边之间的夹角的差的绝对值小于或等于预设阈值的情况下,识别到车辆行驶正常;
29、在所述左右车道线与所述道路图像底边之间的夹角的差的绝对值大于所述预设阈值的情况下,识别到车辆行驶存在异常。
30、可选的,所述响应于副驾驶触发辅助驾驶,基于副驾驶位发出的控制指令控制车辆,包括:
31、响应于副驾驶通过语音触发辅助驾驶,基于副驾驶位发出的语音控制指令控制车辆。
32、可选的,所述响应于副驾驶通过语音触发辅助驾驶,基于副驾驶位发出的语音控制指令控制车辆之前,还包括:
33、根据多个分布在不同位置的麦克风接收到语音的时刻,识别出副驾驶位发出的语音。
34、根据本公开的第二方面,提供了一种车辆控制装置,包括:
35、获取模块,用于获取车辆运行数据、外部环境数据和主驾驶位的用户行为数据;
36、处理模块,用于根据所述车辆运行数据、外部环境数据和主驾驶位的用户行为数据,识别是否存在异常,以在存在异常的情况下发出提示信息;
37、控制模块,用于响应于副驾驶触发辅助驾驶,基于副驾驶位发出的控制指令控制车辆。
38、可选的,所述提示信息用于提醒副驾驶触发辅助驾驶;
39、所述处理模块,包括:
40、第一识别单元,用于根据所述车辆运行数据和所述外部环境数据,识别车辆行驶是否存在异常;
41、第二识别单元,用于在识别到车辆行驶存在异常的情况下,根据所述主驾驶位的用户行为数据,识别驾驶状态是否正常;
42、处理单元,用于在识别到所述驾驶状态存在异常的情况下,发出用于提醒副驾驶触发辅助驾驶的提示信息。
43、可选的,所述第一识别单元,还用于:
44、对所述外部环境数据中采集的限速标志进行识别,以确定速度上限和/或速度下限;
45、在所述车辆运行数据中采集的车辆速度大于所述速度上限的情况下,确定所述车辆超速行驶;
46、在所述车辆运行数据中采集的车辆速度小于所述速度下限的情况下,确定所述车辆慢速行驶;
47、在确定所述车辆超速行驶或所述车辆慢速行驶的情况下,识别到所述车辆行驶存在异常。
48、可选的,所述第一识别单元,还用于:
49、对所述外部环境数据中采集的道路图像进行车道线识别,以确定所述车道线在所述道路图像中的位置;
50、根据所述车道线在所述道路图像中的位置,确定车辆相对于所述车道线的位置;
51、根据所述车辆相对于所述车道线的位置,识别车辆行驶是否存在异常。。
52、可选的,所述第一识别单元,还用于:
53、对所述外部环境数据中采集的道路图像进行车道线识别,以确定所述车道线在所述道路图像中的位置;
54、根据所述车道线在所述道路图像中的位置,确定左右车道线与所述道路图像底边之间的夹角;
55、在所述左右车道线与所述道路图像底边之间的夹角的差的绝对值小于或等于预设阈值的情况下,识别到车辆行驶正常;
56、在所述左右车道线与所述道路图像底边之间的夹角的差的绝对值大于所述预设阈值的情况下,识别到车辆行驶存在异常。
57、可选的,所述主驾驶位的用户行为数据包括眼部数据和身体姿态数据中的至少一个,所述眼部数据包括闭眼时间和闭眼频率,所述身体姿态数据包括身体姿态的时间和身体姿态的频率;
58、所述第二识别单元,还用于:
59、在所述闭眼时间大于或者等于所述第一安全时间阈值,和/或,所述闭眼频率大于或者等于所述第一安全频率阈值的情况下,识别到驾驶状态存在异常;
60、在所述身体姿态的时间大于或者等于所述第二安全时间阈值,和/或,所述身体姿态的频率大于或者等于所述第二安全频率阈值的情况下,识别到驾驶状态存在异常。
61、可选的,所述控制模块,还用于:
62、响应于副驾驶通过语音触发辅助驾驶,基于副驾驶位发出的语音控制指令控制车辆。
63、可选的,所述装置,还包括:
64、识别模块,用于根据多个分布在不同位置的麦克风接收到语音的时刻,识别出副驾驶位发出的语音。
65、根据本公开的第三方面,提供了一种电子设备,包括:
66、至少一个处理器;以及
67、与所述至少一个处理器通信连接的存储器;其中,
68、所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行前述第一方面所述的方法。
69、根据本公开的第四方面,提供了一种存储有计算机指令的非瞬时计算机可读存储介质,其中,所述计算机指令用于使所述计算机执行前述第一方面所述的方法。
70、根据本公开的第五方面,提供了一种计算机程序产品,包括计算机程序,所述计算机程序在被处理器执行时实现如前述第一方面所述的方法。
71、本公开提供的车辆控制方法、装置、电子设备和存储介质,通过获取车辆运行数据、外部环境数据和主驾驶位的用户行为数据,实现根据车辆运行数据、外部环境数据和主驾驶位的用户行为数据,识别是否存在异常,以在存在异常的情况下发出提示信息,从而响应于副驾驶触发辅助驾驶,基于副驾驶位发出的控制指令控制车辆。由于可以基于车辆运行数据、外部环境数据和主驾驶位的用户行为数据提醒副驾驶触发辅助驾驶,从而使得副驾驶能够参与到辅助驾驶,有效保证车辆成员的安全,避免意外事故的发生。
72、应当理解,本部分所描述的内容并非旨在标识本公开的实施例的关键或重要特征,也不用于限制本公开的范围。本公开的其它特征将通过以下的说明书而变得容易理解。
- 还没有人留言评论。精彩留言会获得点赞!