一种基于图像的物体跟踪方法及其智能摄像头与流程
本发明提出了一种基于图像的物体跟踪方法及其智能摄像头,属于摄像控制。
背景技术:
1、智能摄像机是把光学图像信号转变为电信号记录下来的设备,通过摄像器件把光转变为电能,得到视频信号,通过预放电路进行放大,经过各种电路进行处理和调整,得到标准信号送到录像等记录媒介上记录下来的设备。现有技术中智能摄像头的跟踪准确性较低,导致跟踪的视频内的移动物体跑出画面的问题发生。
技术实现思路
1、本发明提供了一种基于图像的物体跟踪方法及其智能摄像头,用以解决现有技术中智能摄像头的跟踪准确性较低,导致跟踪的视频内的移动物体跑出画面的问题,所采取的技术方案如下:
2、一种基于图像的物体跟踪方法的智能摄像头,所述智能摄像头包括视频信号采集电路、信号处理及驱动电路和电机;所述视频信号采集电路视频信号输出端与所述信号处理及驱动电路的视频信号输入端相连;所述信号处理及驱动电路的电机控制信号输出端与所述电机的控制信号输入端相连。
3、进一步地,所述信号处理及驱动电路包括信号转换电路、视频信号联动处理电路和马达驱动电路;所述视频信号采集电路的视频信号输出端与所述信号转换电路的视频信号输入端相连;所述信号转换电路的电信号输出端与所述视频信号联动处理电路的电信号输入端相连;所述视频信号联动处理电路的电极信号输出端与所述马达驱动电路的电机信号输入端相连;所述马达驱动电路的电机控制信号输出端与所述电机的控制信号输入端相连。
4、进一步地,所述智能摄像头的运行过程包括:
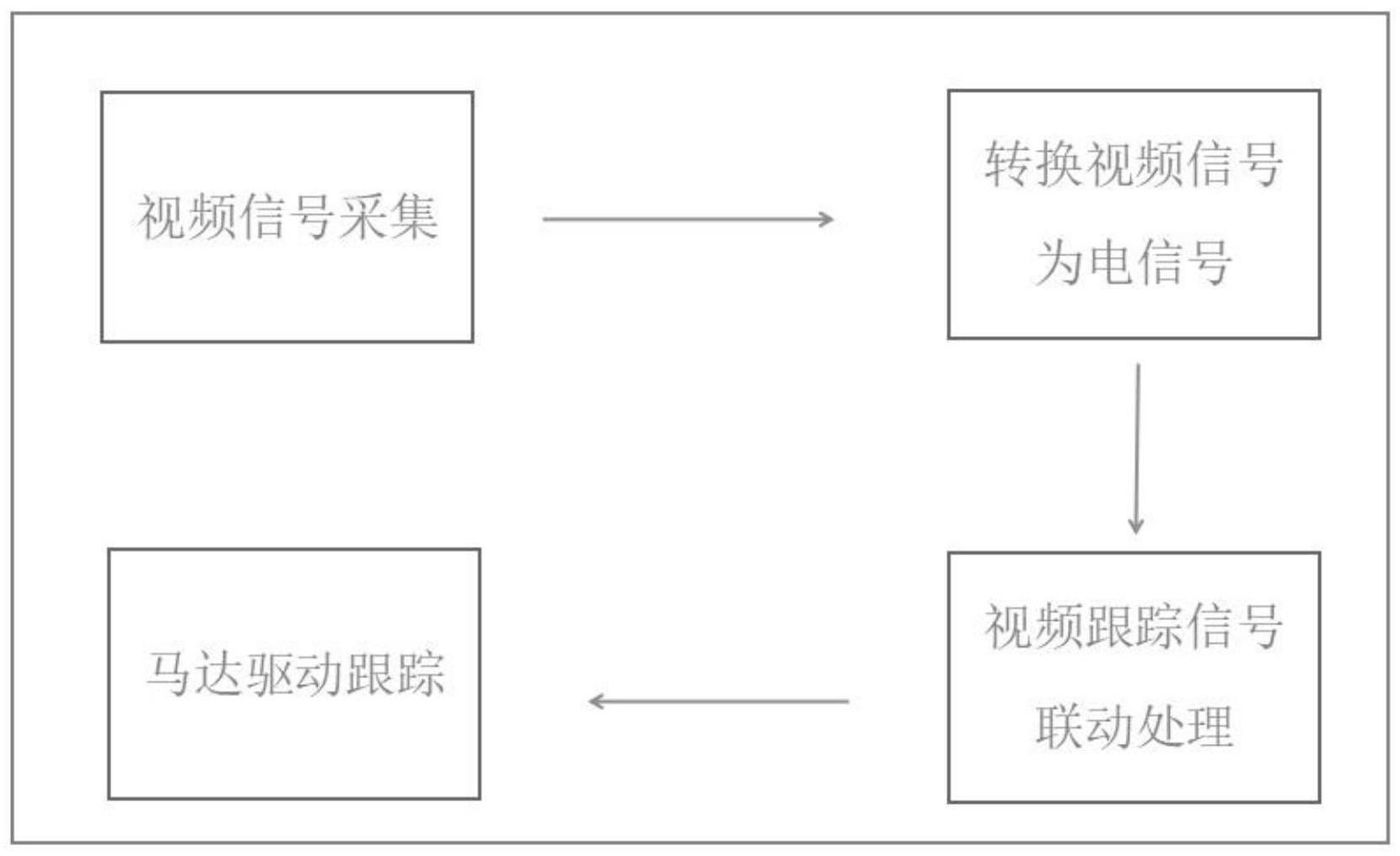
5、通过视频信号采集电路实时采集监控区域内的视频信号,并将所述视频信号发送至信号处理及驱动电路;
6、所述信号处理及驱动电路在接收到视频信号后,对所述视频信号进行转换和联动处理,获得与所述视频信号相对应的电机驱动信号,并将所述电机驱动信号发送至电机;
7、所述电机接收到所述电机驱动信号后,根据所述电机驱动信号进行水平方向和/或垂直方向的转动,用以带动所述智能摄像头跟踪所述监控区域内的移动物体。
8、进一步地,所述信号处理及驱动电路在接收到视频信号后,对所述视频信号进行转换和联动处理,获得与所述视频信号相对应的电机驱动信号,并将所述电机驱动信号发送至电机,包括:
9、所述信号处理及驱动电路的信号转换电路接收到所述视频信号采集电路发送的视频信号,将所述视频信号转化为与所述视频信号对应的电信号,并将所述电信号发送至视频信号联动处理电路;
10、所述视频信号联动处理电路接收到所述电信号后,根据所述电信号反应的视频信息生成电机控制信号,并将所述电机控制信号发送至马达驱动电路,通过马达驱动电路将所述电机驱动信号发送至电机,使其对电机进行驱动控制。
11、进一步地,所述视频信号联动处理电路接收到所述电信号后,根据所述电信号反应的视频信息生成电机控制信号,并将所述电机控制信号发送至马达驱动电路,通过马达驱动电路将所述电机驱动信号发送至电机,包括:
12、所述视频信号联动处理电路接收到所述电信号后,获取与电信号对应的视频信息;
13、所述视频信号联动处理电路根据所述视频信息生成与所述视频信息对应的电机水平控制信号和/或电机垂直控制信号;
14、所述视频信号联动处理电路将所述电机水平控制信号和/或电机垂直控制信号发送至电马达驱动电路;
15、所述马达驱动电路在接收到所述电机水平控制信号和/或电机垂直控制信号后,根据所述电机水平控制信号和/或电机垂直控制信号驱动电机进行水平移动和/或垂直移动。
16、进一步地,所述智能摄像头还包括第一位移传感器、第二位移传感器和红外线感应器;所述第一位移传感器、第二位移传感器的位移信号输出端与视频信号联动处理电路的位移信号输入端相连;所述红外线感应器的感应信号输出端与所述视频信号联动处理电路的感应信号输入端相连;
17、所述第一位移传感器,用于实时监控智能摄像头的水平移动角度,并将所述水平移动角度发送至视频信号联动处理电路;
18、所述第二位移传感器,用于实时监控智能摄像头的垂直移动角度,并将所述垂直移动角度发送至视频信号联动处理电路;
19、所述红外线感应器,用于实时监测所述监控区域内出现的移动物体的移动轨迹,并将所述移动轨迹及轨迹变化点依次发送至视频信号联动处理电路;
20、所述视频信号联动处理电路,用于将所述移动轨迹与所述智能摄像头的位移信息进行比较,并根据比较结果对电机驱动进行补偿调节。
21、一种基于图像的物体跟踪方法,所述物体跟踪方法包括:
22、通过视频信号采集电路实时采集监控区域内的视频信号,并将所述视频信号发送至信号处理及驱动电路;
23、所述信号处理及驱动电路在接收到视频信号后,对所述视频信号进行转换和联动处理,获得与所述视频信号相对应的电机驱动信号,并将所述电机驱动信号发送至电机;
24、所述电机接收到所述电机驱动信号后,根据所述电机驱动信号进行水平方向和/或垂直方向的转动,用以带动所述智能摄像头跟踪所述监控区域内的移动物体;
25、实时采集智能摄像头的移动角度信息,并采集监控区域内移动物体的移动轨迹,通过所述移动角度信息和移动轨迹之间的比较结果结合移补偿量模型,对电机的转动进行补偿调整。
26、进一步地,所述信号处理及驱动电路在接收到视频信号后,对所述视频信号进行转换和联动处理,获得与所述视频信号相对应的电机驱动信号,并将所述电机驱动信号发送至电机,包括:
27、所述信号处理及驱动电路的信号转换电路接收到所述视频信号采集电路发送的视频信号,将所述视频信号转化为与所述视频信号对应的电信号,并将所述电信号发送至视频信号联动处理电路;
28、所述视频信号联动处理电路接收到所述电信号后,根据所述电信号反应的视频信息生成电机控制信号,并将所述电机控制信号发送至马达驱动电路,通过马达驱动电路对电机进行驱动控制。
29、进一步地,所述视频信号联动处理电路接收到所述电信号后,根据所述电信号反应的视频信息生成电机控制信号,并将所述电机控制信号发送至马达驱动电路,通过马达驱动电路对电机进行驱动控制,包括:
30、所述视频信号联动处理电路接收到所述电信号后,获取与电信号对应的视频信息;
31、所述视频信号联动处理电路根据所述视频信息生成与所述视频信息对应的电机水平控制信号和/或电机垂直控制信号;
32、所述视频信号联动处理电路将所述电机水平控制信号和/或电机垂直控制信号发送至电马达驱动电路;
33、所述马达驱动电路在接收到所述电机水平控制信号和/或电机垂直控制信号后,根据所述电机水平控制信号和/或电机垂直控制信号驱动电机进行水平移动和/或垂直移动。
34、进一步地,所述实时采集智能摄像头的移动角度信息,并采集监控区域内移动物体的移动轨迹,通过所述移动角度信息和移动轨迹之间的比较结果结合移补偿量模型,对电机的转动进行补偿调整,包括:
35、利用第一位移传感器实时监控智能摄像头的水平移动角度,并将所述水平移动角度发送至视频信号联动处理电路;
36、利用第二位移传感器实时监控智能摄像头的垂直移动角度,并将所述垂直移动角度发送至视频信号联动处理电路;
37、利用红外线感应器实时监测所述监控区域内出现的移动物体的移动轨迹,并将所述移动轨迹及轨迹变化点依次发送至视频信号联动处理电路;
38、所述视频信号联动处理电路将所述移动轨迹与所述智能摄像头的位移信息进行比较,并根据比较结果结合移补偿量模型获取电机驱动补偿量,利用所述电机驱动补偿量对电机驱动进行补偿调节。
39、本发明有益效果:
40、本发明提出的一种基于图像的物体跟踪方法及其智能摄像头通过视频信号采集电路进行视频信号采集,并通过信号处理及驱动电路将视频信息转化为电机控制信息控制电机带动智能摄像头根据移动物体的运行轨迹进行水平和垂直移动,实现智能摄像头对移动物体的跟踪拍摄。同时,通过位移传感器和红外线感应器分别针对智能摄像头实际移动情况和移动物体的实际移动轨迹进行实时监测和比较的方式,对智能摄像头的移动偏差进行补偿控制,使移动物体实时存在与智能摄像头的镜头画面内。
- 还没有人留言评论。精彩留言会获得点赞!