相机模块及相机模块控制方法与流程
本发明涉及相机模块以及用于控制相机模块的方法,并且更具体地,涉及基于用于关于从磁体发出的通过使用多个霍尔传感器进行测量而获取的磁力的大小的信息并且预先通过使用三角函数从该信息中去除由外部因素引起的噪声来检测透镜的位置的技术。
背景技术:
1、随着技术的进步并且相机模块的小型化变得可能,小的相机模块正被应用于并用在诸如智能电话、移动电话、pda等的各种it设备中。相机模块使用诸如ccd或cmos的图像传感器作为主要部件来制造,并且被制造成能够进行聚点调整以调整图像的尺寸。
2、这样的相机模块被配置成包括多个透镜和致动器,并且当致动器移动每个透镜以改变相对距离时可以以调整光学焦距的方式来拍摄相对于被摄体的对象。
3、具体地,相机模块包括:图像传感器,其将从外部接收的光信号转换为电信号;透镜,其将光聚焦到图像传感器上;红外(ir)滤波器;容纳上述部件的壳体;以及处理图像传感器信号的印刷电路板等,并且致动器通过诸如音圈马达(vcm)致动器或微机电系统(mems)致动器的致动器来调整透镜的焦距。
4、同时,诸如智能电话、平板pc和膝上型计算机的便携式设备具有内置的超小型相机模块,并且这样的相机模块可以执行自动地调整图像传感器与透镜之间的距离以对准透镜的焦距的自动聚焦(af)功能。
5、另外,通常,相机配备有变焦功能以拍摄远处对象的图片,并且变焦功能主要分为:光学变焦,在光学变焦中,相机内部的实际透镜移动以增大或减小被摄体的放大率;以及数字变焦方法,在该数字变焦方法中,通过使用数字处理方法放大被拍摄被摄体的图像数据的一部分来实现变焦效果。
6、在通过使用透镜移动来获得对象的图像的光学变焦的情况下,与数字处理方法相比,存在获得具有相对高的分辨率的图像的优点。
7、另外,在最近的相机模块中,采用图像稳定(is)技术来校正或防止由于固定设备的不稳定或用户移动而引起的相机移动造成的图像抖动。
8、通常,光学图像稳定器(ois)技术用于通过物理地移动相机的透镜或图像传感器来改变光路而补偿移动。因此,ois技术通过陀螺仪传感器或霍尔传感器检测相机的移动,并且基于所检测到的移动,以计算透镜或图像传感器应当移动的距离的方式来执行校正。
9、并且ois校正方法主要分为透镜移动方法和模块倾斜方法。在透镜移动方法中,通过仅移动相机模块中的透镜以重新对准图像传感器的中心和光轴来执行校正。另一方面,在模块倾斜方法中,通过移动包括透镜和图像传感器的整个模块来执行校正。
10、因此,当通过透镜移动方法执行校正时,在相机模块内部设置霍尔传感器以检测透镜的位置和移动。具体地,在检测从在透镜模块或透镜组件的外周表面上设置的感测磁体发出的磁力的大小和方向之后,并且基于该磁力的大小和方向,可以检测透镜的位置。
11、然而,在该方法的情况下,从感测磁体发出的磁力的大小受到外部因素的极大影响。例如,由于受到温度、外部碰撞、信号干扰、外部干扰等的极大影响,由霍尔传感器测量的磁力的大小测量包括由这样的外部影响引起的噪声的结果,并且因此,在基于这样的结果检测透镜的位置的情况下,存在不能准确地检测透镜的位置的缺点。
12、也就是说,在相机模块中,针对每个感测磁体设置用于测量磁力的一个传感器,并且由传感器测量的磁力的大小和方向测量受外部影响的结果,因此存在实际透镜位置与检测到的透镜位置之间不匹配的问题。
技术实现思路
1、技术主题
2、因此,本发明是为了解决以上提及的现有技术的问题而设计的发明,并且本发明的目的是提供能够通过使用多个传感器获取关于从其去除外部影响的磁力的信息来更准确地检测透镜的位置的相机模块以及用于控制相机模块的方法。
3、更具体地,本发明提供了能够通过基于使用多个传感器的测量结果生成三角函数并且通过使用所生成的三角函数获得从其去除包括外部影响的噪声的结果来更准确地检测透镜位置的相机模块以及用于控制相机模块的方法。
4、技术方案
5、根据一个实施方式的相机模块可以包括:透镜镜筒,其包括至少一个透镜;磁体,其设置在透镜镜筒的一个表面上;第一传感器和第二传感器,其测量从磁体发出的磁力;以及控制单元,其通过基于关于由第一传感器和第二传感器测量的磁力的信息去除由于外部环境引起的噪声来检测透镜的位置。
6、控制单元可以基于以下的值来检测透镜的位置:所述值是包括关于由第一传感器测量的磁力的信息的数值与包括关于由第二传感器测量的磁力的信息的数值进行抵消而获得的。
7、控制单元分别基于与由第一传感器和第二传感器测量的磁力有关的信息来生成包含关于根据位置的磁力的大小的信息的三角函数,并且可以基于所生成的多个三角函数检测透镜的位置。
8、控制器可以生成正弦(sin)函数表达式或余弦(cos)函数表达式,作为对包括关于由传感器测量的磁力的信息的数值进行近似的方法。
9、控制单元可以使用正弦函数表达式和余弦函数表达式生成正切(tan)函数表达式或反正切(arctan)函数表达式,并且然后基于所生成的函数表达式检测透镜的位置。
10、在相机模块中,控制单元基于由第一传感器测量的信息生成包括根据位置的磁力的大小的正弦(sin)函数表达式,并且基于由第二传感器测量的信息生成包括根据位置的磁力的大小的余弦(cos)函数表达式。
11、可以将第一传感器和第二传感器设置在同一轴线上。
12、可以将第一传感器和第二传感器设置在相对于磁体的中心线彼此对称的位置处。
13、第一传感器和第二传感器可以被设置成相对于磁体彼此等距地间隔开预设的第一距离。
14、预设的第一距离可以包括0.5mm或更大且2mm或更小的距离。
15、第一传感器和第二传感器可以被设置成间隔开预设的第二距离。
16、预设的第二距离可以包括1mm或更大且2mm或更小的距离。
17、根据另一实施方式的相机模块可以包括:第一透镜和第二透镜;第一镜筒和第二镜筒,其分别耦接至第一透镜和第二透镜的一个表面;第一磁体和第二磁体,其分别耦接至第一镜筒和第二镜筒的一个表面;以及控制单元,其用于分别基于由各自测量从第一磁体和第二磁体发出的多个磁力的多个传感器和多个霍尔传感器测量的信息来生成包含关于根据位置的磁力的大小的信息的三角函数,并且基于所生成的多个三角函数检测第一透镜和第二透镜的位置。
18、多个霍尔传感器可以包括:用于测量从第一磁体发出的磁力的第一传感器和第二传感器,以及用于测量从第二磁体发出的磁力的第三传感器和第四传感器。
19、控制单元基于由传感器测量的信息生成包括关于根据位置的磁力的大小的信息的正弦(sin)函数表达式或余弦(cos)函数表达式,并且然后使用正弦函数表达式和余弦函数表达式生成正切(tan)函数表达式或反正切(arctan)函数表达式,并且然后可以使用所生成的函数表达式检测透镜的位置。
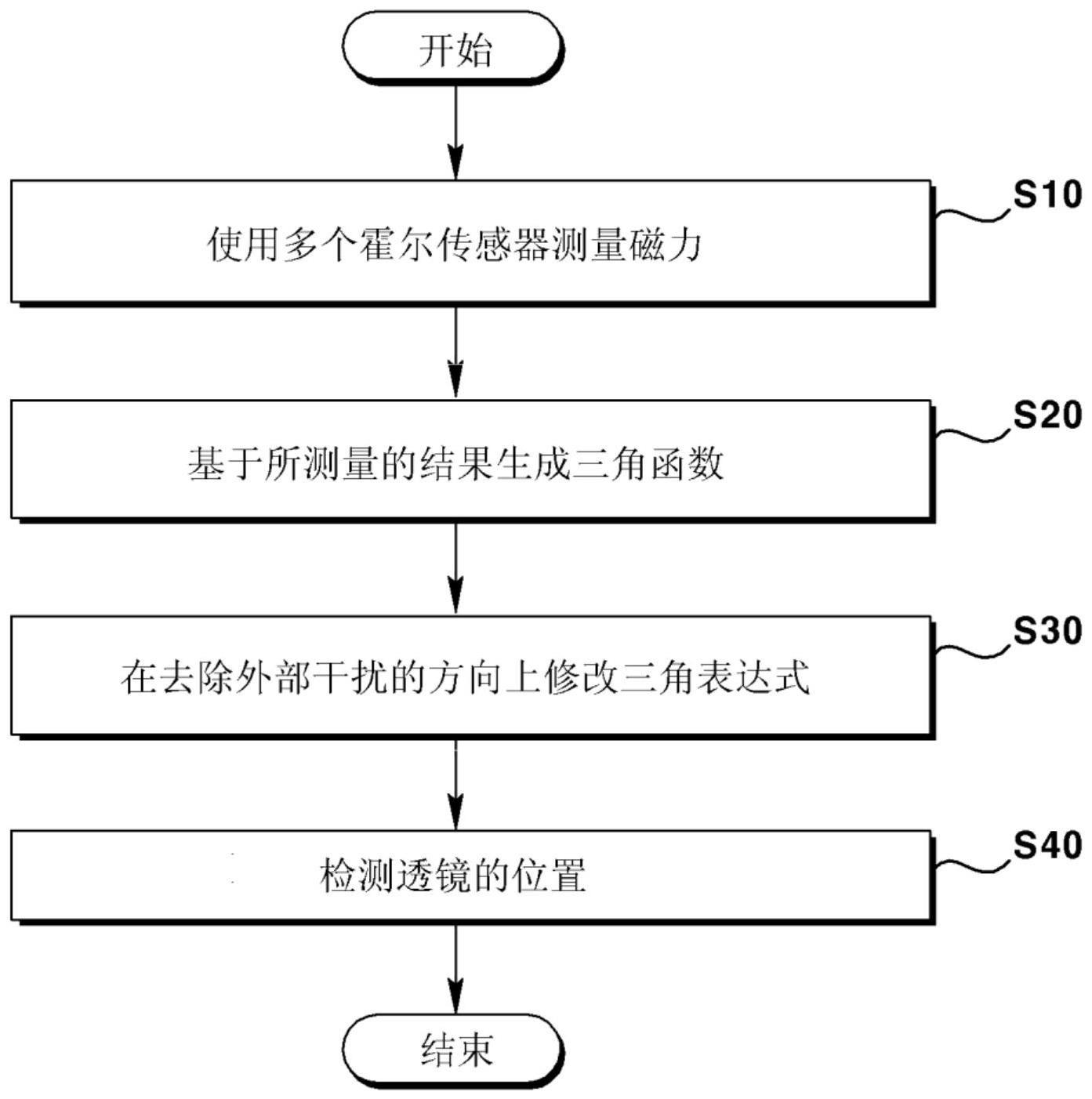
20、在用于检测至少一个透镜的位置的相机模块控制方法中,根据另一实施方式的相机模块控制方法可以包括以下步骤:使用第一传感器和第二传感器测量从设置在透镜的一个表面上的磁体发出的磁力的大小;以及通过基于关于由第一传感器和第二传感器测量的磁力的信息去除由外部环境引起的噪声来检测透镜的位置。
21、检测透镜的位置的步骤可以包括以下步骤:基于包括关于由第一传感器测量的磁力的信息的数值与包括关于由第二传感器测量的磁力的信息的数值进行抵消而获得的值来检测透镜的位置。
22、检测透镜的位置的步骤可以包括以下步骤:分别基于由第一传感器和第二传感器测量的信息来生成包括关于根据位置的磁力的大小的信息的三角函数;以及基于所生成的多个三角函数检测第一透镜和第二透镜的位置。
23、生成三角函数的步骤可以包括:基于由传感器测量的信息生成包含关于根据位置的磁力的大小的信息的正弦(sin)函数表达式或余弦(cos)函数表达式。
24、检测透镜的位置的步骤可以包括以下步骤:使用正弦函数表达式和余弦函数表达式生成正切(tan)函数表达式或反正切(arctan)函数表达式,并且然后使用所生成的函数表达式检测透镜的位置。
25、第一传感器和第二传感器可以被设置成相对于磁体彼此等距地间隔开预设的第一距离。
26、第一传感器和第二传感器设置在同一轴线上,或者可以设置在相对于磁体的中心线彼此对称的位置处。
27、有益效果
28、在根据实施方式的相机模块中,在检测相机模块内部的透镜的位置时,可以去除由于外部环境而引起的影响,从而可以更准确地检测透镜的位置。因此,存在可以准确地执行ois校正的效果。
29、另外,根据实施方式的相机模块可以通过附加地仅附接传感器而无需附加地附接昂贵的设备来检测透镜的位置,因此存在可以更经济地生产可以准确地检测透镜的位置的相机模块的效果。
- 还没有人留言评论。精彩留言会获得点赞!