一种雷达视频一体机的制作方法
本申请涉及监控设备,尤其涉及一种雷达视频一体机。
背景技术:
1、雷达视频一体机是将雷达测速与视频抓拍集成到同一台设备上,从而在视频监控的同时,能够精准的对目标进行捕捉与测速。传统雷达视频一体机的传感器由一个毫米波雷达和一个摄像头组成,感知方向上近端存在较大的感知盲区。
2、现有技术中,一般需要前一个点位的雷达视频一体机去覆盖当前点位的雷达视频一体机的感知盲区,这样需要调整雷达视频一体机的摄像头的角度,然而角度调整可能会出现感知盲区覆盖不全的情况,影响整体感知效果。
3、因此,如何避免出现近端感知盲区,成为了亟待解决的技术问题。
技术实现思路
1、本说明书实施例提供一种雷达视频一体机,以解决现有的近端感知盲区较大的问题。
2、为解决上述技术问题,本说明书实施例是这样实现的:
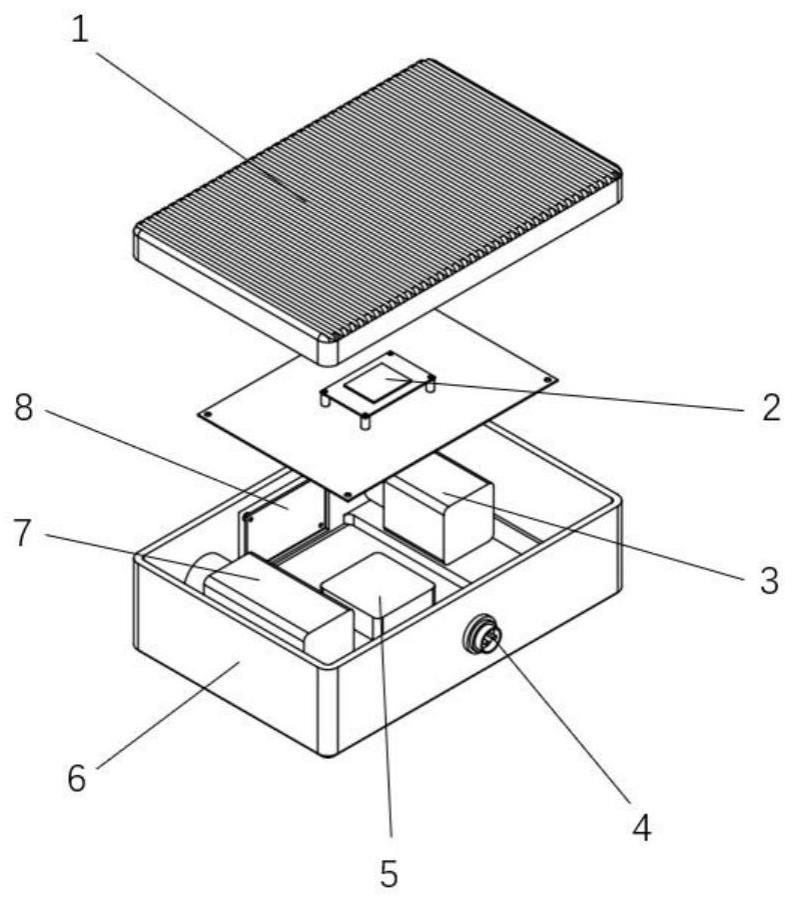
3、本说明书实施例提供的一种雷达视频一体机,包括:摄像头模块、雷达模块、核心处理器、盖板和底盒,所述底盒包括底座和外围侧面;
4、所述摄像头模块、所述雷达模块和所述核心处理器位于所述盖板和所述底盒构成的空间内;
5、所述摄像头模块包括多个不同拍摄距离的摄像头,用于采集不同拍摄距离内的交通视频流数据;
6、所述雷达模块,用于采集交通点云数据;
7、所述核心处理器,用于将所述交通视频流数据和所述交通点云数据进行融合处理。
8、可选的,所述多个不同拍摄距离的摄像头包括近景摄像头、远景摄像头和鱼眼摄像头。
9、可选的,所述鱼眼摄像头位于所述底座上,所述近景摄像头和所述远景摄像头位于所述外围侧面的同一侧面上;其中,所述鱼眼摄像头与所述底座上的第一通孔相匹配,所述近景摄像头与所述外围侧面上的第一通孔相匹配,所述远景摄像头与所述外围侧面上的第二通孔相匹配。
10、可选的,所述雷达模块与所述近景摄像头和所述远景摄像头位于所述外围侧面的同一侧面。
11、可选的,还包括对外接插件,所述对外接插件与所述核心处理器电连接,用于输出融合处理后的数据。
12、可选的,还包括gps授时模块,所述gps授时模块与所述摄像头模块和所述雷达模块电连接,用于将所述交通视频流数据和所述交通点云数据的时间戳进行同步,得到同步后的交通数据。
13、可选的,所述核心处理器与所述盖板相连接,与所述摄像头模块和所述雷达模块位于不同的水平面。
14、可选的,所述盖板的外表面设置散热齿。
15、本说明书实施例还提供的一种交通数据处理方法,所述方法应用于所述的雷达视频一体机,包括:获取不同拍摄距离内的交通视频流数据和交通点云数据;将所述交通视频流数据和所述交通点云数据进行融合处理,输出融合处理后的数据。
16、本说明书一个实施例实现了能够达到以下有益效果:本实施例通过设置多个不同拍摄距离的摄像头,可以采集不同感知范围内的交通数据,从而避免出现近端感知盲区,同时提高感知精度,增加感知范围。
技术特征:
1.一种雷达视频一体机,其特征在于,包括:摄像头模块、雷达模块、核心处理器、盖板和底盒,所述底盒包括底座和外围侧面;
2.根据权利要求1所述的雷达视频一体机,其特征在于,所述多个不同拍摄距离的摄像头包括近景摄像头、远景摄像头和鱼眼摄像头。
3.根据权利要求2所述的雷达视频一体机,其特征在于,所述鱼眼摄像头位于所述底座上,所述近景摄像头和所述远景摄像头位于所述外围侧面的同一侧面上;其中,所述鱼眼摄像头与所述底座上的第一通孔相匹配,所述近景摄像头与所述外围侧面上的第一通孔相匹配,所述远景摄像头与所述外围侧面上的第二通孔相匹配。
4.根据权利要求3所述的雷达视频一体机,其特征在于,所述雷达模块与所述近景摄像头和所述远景摄像头位于所述外围侧面的同一侧面。
5.根据权利要求1所述的雷达视频一体机,其特征在于,还包括对外接插件,所述对外接插件与所述核心处理器电连接,用于输出融合处理后的数据。
6.根据权利要求1所述的雷达视频一体机,其特征在于,还包括gps授时模块,所述gps授时模块与所述摄像头模块和所述雷达模块电连接,用于将所述交通视频流数据和所述交通点云数据的时间戳进行同步,得到同步后的交通数据。
7.根据权利要求1所述的雷达视频一体机,其特征在于,所述核心处理器与所述盖板相连接,与所述摄像头模块和所述雷达模块位于不同的水平面。
8.根据权利要求1所述的雷达视频一体机,其特征在于,所述盖板的外表面设置散热齿。
9.一种交通数据处理方法,所述方法应用于权利要求1所述的雷达视频一体机,包括:
技术总结
本说明书实施例公开了一种雷达视频一体机,包括:摄像头模块、雷达模块、核心处理器、盖板和底盒,所述底盒包括底座和外围侧面;所述摄像头模块、所述雷达模块和所述核心处理器位于所述盖板和所述底盒构成的空间内;所述摄像头模块包括多个不同拍摄距离的摄像头,用于采集不同拍摄距离内的交通视频流数据;所述雷达模块,用于采集交通点云数据;所述核心处理器,用于将所述交通视频流数据和所述交通点云数据进行融合处理。
技术研发人员:隋永吉,杜子建
受保护的技术使用者:云控智行科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!