图像采集设备的处理方法、装置、电子设备和存储介质与流程
本发明涉及图像采集设备,尤其涉及一种图像采集设备的处理方法、装置、电子设备和存储介质。
背景技术:
1、随着智能化煤矿的建设,以视频监控为基础的图像人工智能技术在煤矿也得到广泛关注,智能识别、视频巡检、目标识别与检测等煤矿开采智能化理念的落地,对视频图像的依赖也越来越大。然而,对于高速运行下煤矿带式输送机等场景,常规矿用摄像仪因曝光时间长、采集图像帧率低(一般在20fps-30fps左右)等影响,会导致采集到的图像会出现模糊、拖影等现象,影响皮带大块煤、异物等检测功能的识别精度。
技术实现思路
1、本发明旨在从一定程度上解决相关技术中的技术问题。
2、为此,本发明的第一个目的在于提出一种图像采集设备的处理方法,该方法采用spiht算法和canny边缘检测算法的结合对原始图像进行处理以得到目标图像,这样能够避免对高速运动物体图像采集时出现模糊、拖影等现象,提高运动物体的识别精度。
3、本发明的第二个目的在于提出一种图像采集设备的处理装置。
4、本发明的第三个目的在于提出一种电子设备。
5、本发明的第四个目的在于提出一种计算机可读存储介质。
6、本发明的第五个目的在于提出一种计算机程序产品。
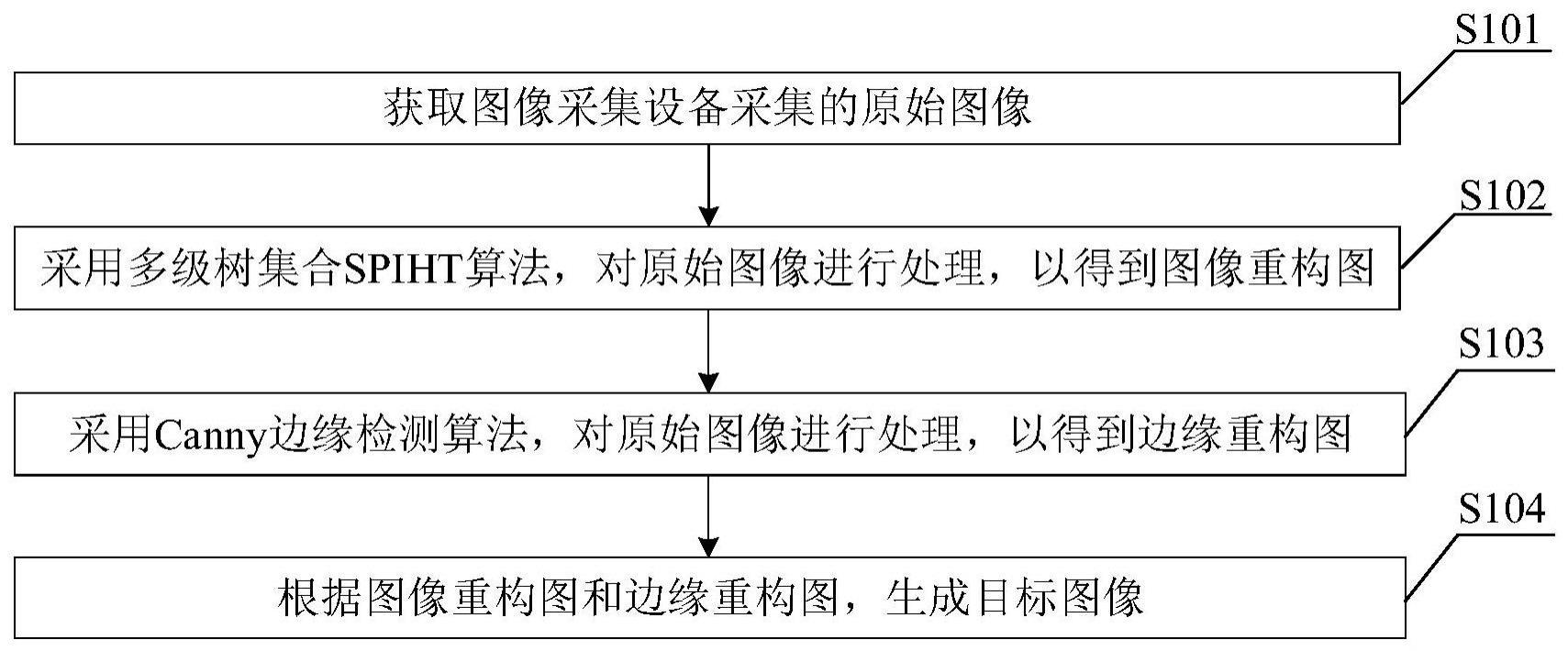
7、为达到上述目的,本发明第一方面实施例提出了一种图像采集设备的处理方法,包括以下步骤:获取图像采集设备采集的原始图像;采用多级树集合spiht算法,对所述原始图像进行处理,以得到图像重构图;采用canny边缘检测算法,对所述原始图像进行处理,以得到边缘重构图;根据所述图像重构图和所述边缘重构图,生成目标图像。
8、根据本发明实施例的图像采集设备的处理方法,先获取图像采集设备采集的原始图像,之后采用多级树集合spiht算法,对原始图像进行处理,以得到图像重构图,并采用canny边缘检测算法,对原始图像进行处理,以得到边缘重构图,最后根据图像重构图和边缘重构图,生成目标图像。由此,该方法采用spiht算法和canny边缘检测算法的结合对原始图像进行处理以得到目标图像,这样能够避免对高速运动物体图像采集时出现模糊、拖影等现象,提高运动物体的识别精度。
9、另外,本发明第一方面实施例提出的图像采集设备的处理方法还可以具有如下附加的技术特征:
10、根据本发明的一个实施例,所述采用多级树集合spiht算法,对所述原始图像进行处理,以得到图像重构图,包括:
11、对所述原始图像进行小波变换;
12、对小波变换后得到的图像依次进行spiht编码和huffman编码,以得到压缩码流;
13、对所述压缩码流依次进行huffman解码、spiht解码和小波逆变换,以得到所述图像重构图。
14、根据本发明的一个实施例,所述采用canny边缘检测算法,对所述原始图像进行处理,以得到边缘重构图,包括:
15、采用canny边缘检测算子对所述原始图像进行处理,以得到所述原始图像的高频信息;
16、根据所述原始图像的高频信息,生成边缘图;
17、对所述边缘图依次进行哈夫曼编码和哈夫曼解码,以得到所述边缘重构图。
18、根据本发明的一个实施例,上述方法还包括:
19、从生成的多帧所述目标图像中提取视频关键帧;
20、对所述视频关键帧进行分析,以判断所述视频关键帧中是否存在目标物;
21、如果存在目标物,则发出报警提示信息。
22、为达到上述目的,本发明第二方面实施例提出了一种图像采集设备的处理装置,包括:获取模块,用于获取图像采集设备采集的原始图像;第一处理模块,用于采用多级树集合spiht算法,对所述原始图像进行处理,以得到图像重构图;第二处理模块,用于采用canny边缘检测算法,对所述原始图像进行处理,以得到边缘重构图;生成模块,用于根据所述图像重构图和所述边缘重构图,生成目标图像。
23、根据本发明实施例的图像采集设备的处理装置,通过获取模块获取图像采集设备采集的原始图像,通过第一处理模块采用多级树集合spiht算法对原始图像进行处理以得到图像重构图,并通过第二处理模块采用canny边缘检测算法对原始图像进行处理以得到边缘重构图,通过生成模块根据图像重构图和边缘重构图生成目标图像。由此,该装置采用spiht算法和canny边缘检测算法的结合对原始图像进行处理以得到目标图像,这样能够避免对高速运动物体图像采集时出现模糊、拖影等现象,提高运动物体的识别精度。
24、另外,本发明第二方面实施例提出的图像采集设备的处理装置还可以具有如下附加的技术特征:
25、根据本发明的一个实施例,所述第一处理模块用于采用多级树集合spiht算法,对所述原始图像进行处理,以得到图像重构图时,包括:
26、对所述原始图像进行小波变换;
27、对小波变换后得到的图像依次进行spiht编码和huffman编码,以得到压缩码流;
28、对所述压缩码流依次进行huffman解码、spiht解码和小波逆变换,以得到所述图像重构图。
29、根据本发明的一个实施例,所述第二处理模块用于采用canny边缘检测算法,对所述原始图像进行处理,以得到边缘重构图时,包括:
30、采用canny边缘检测算子对所述原始图像进行处理,以得到所述原始图像的高频信息;
31、根据所述原始图像的高频信息,生成边缘图;
32、对所述边缘图依次进行哈夫曼编码和哈夫曼解码,以得到所述边缘重构图。
33、根据本发明的一个实施例,上述装置还包括:
34、提取模块,用于从生成的多帧目标图像中提取视频关键帧;
35、分析模块,用于对所述视频关键帧进行分析,以识别所述视频关键帧中是否存在目标物;
36、报警模块,用于在识别到所述视频关键中存在所述目标物时,发出报警提示信息。
37、为达到上述目的,本发明第三方面实施例提出了一种电子设备,包括:处理器和存储器;其中,所述处理器通过读取所述存储器中存储的可执行程序代码来运行与所述可执行程序代码对应的程序,以用于实现第一方面实施例的图像采集设备的处理方法。
38、本发明实施例的电子设备,通过执行上述的图像采集设备的处理方法,采用spiht算法和canny边缘检测算法的结合对原始图像进行处理以得到目标图像,这样能够避免对高速运动物体图像采集时出现模糊、拖影等现象,提高运动物体的识别精度。
39、为达到上述目的,本发明第四方面实施例提出了一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现第一方面实施例的图像采集设备的处理方法。
40、本发明实施例的计算机可读存储介质,通过执行上述的图像采集设备的处理方法,采用spiht算法和canny边缘检测算法的结合对原始图像进行处理以得到目标图像,这样能够避免对高速运动物体图像采集时出现模糊、拖影等现象,提高运动物体的识别精度。
41、为达到上述目的,本发明第五方面实施例提出了一种计算机程序产品,当计算机程序产品中的指令处理器执行时,执行第一方面实施例的图像采集设备的处理方法。
42、本发明实施例的计算机程序产品,通过执行上述的图像采集设备的处理方法,采用spiht算法和canny边缘检测算法的结合对原始图像进行处理以得到目标图像,这样能够避免对高速运动物体图像采集时出现模糊、拖影等现象,提高运动物体的识别精度。
43、本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!