基于GNSS系统时间同步的蜂群无人机自组网方法与流程
本发明涉及无人机通信,尤其涉及一种基于gnss系统时间同步的蜂群无人机自组网方法。
背景技术:
1、无人机正在趋向小型化和编队化的发展,且广泛地应用在了军用和民用领域的许多地方。
2、无人机蜂群的组网结构与无线自组网有着很大的相似性,它们都具有无中心、自组织的特点。无人机自组网是将无线自组网技术与无人机结合的一种网络体系,它具有独立组网、自组织和动态中继等特性,在许多领域,尤其是战术通信中,有着十分重要的作用。
3、无人机自组织网络在实际应用过程中通常存在以下关键问题。
4、第一,无人机能量有限,动态性强,因此需要频繁入网和退网,容易造成拓扑快速改变和链路中断问题,因此针对无人机自组网的网络和mac协议需要有更强的容忍链路中断的能力和快速恢复的能力。
5、第二,无人机网络的密度大,小范围下可能存在大量节点通信,因此不适合采用竞争机制的mac协议,如csma/ca协议,因为传输碰撞概率较大导致重传较多,由此带来的传输时延随之增高,tdma类协议通过时隙的划分很大程度地避免了各节点的传输冲突问题,但是固定分配类的tdma协议的信道利用率低,而动态tdma分配类协议的复杂性实现难度高,导致tdma协议在实际应用中还存在很多困难。
6、第三,关于无人机自组网mac协议的理论研究有很多,但是由于协议的复杂性使得它对软硬件的稳健性和实时性提出了较高的要求,并且目前有关这方面的技术实现的研究还比较少。
技术实现思路
1、本发明旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本发明的一个目的在于提出一种基于gnss系统时间同步的蜂群无人机自组网方法,将固定网络节点或连接方式,以路由算法为基础优化为变节点,寻找最短根节点通信路由,减少通信跳数或路由节点数,节省了系统带宽。
2、根据本发明提出的一种基于gnss系统时间同步的蜂群无人机自组网方法,方法步骤如下:
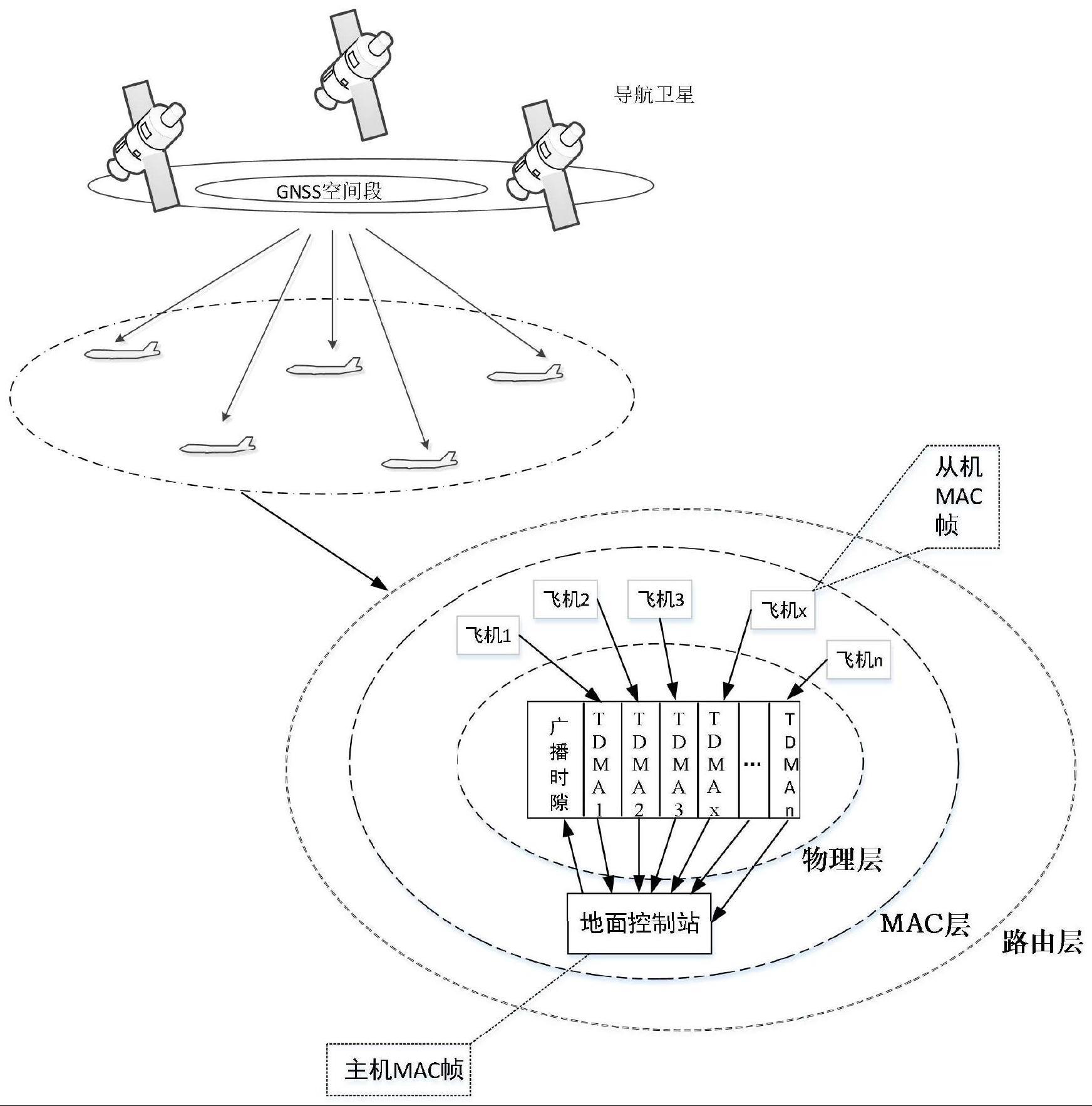
3、s1:秒脉冲同步方法,将1pps秒脉冲信号转化为包含时钟信息和数据信息的数字信号,通过无线通信模块发出;
4、s2:mac层控制接入方法,接收步骤s1发出的数字信号,经过给定延时后,依次完成入网广播,对广播时帧-时隙-mac数据进行填充;
5、s3:路由层协议,将步骤s2中完成入网广播的信号经过路由算法迭代后,建立各个节点路由表,完成各个子节点与根节点路由树建立,并存储;
6、s4:地面控制站,对加入网络的节点进行编号,并赋予附加标记,作为自组网的根节点或目的节点存在,接收载荷数据和遥测数据,并对节点下发指控指令,通过数据标记,动态显示各个节点之间路由路径。
7、优选地,步骤s1中秒脉冲同步方法步骤如下:
8、自组网无人机作为节点,均具备秒脉冲同步能力,内部设置有gnss接收机、a/d信号转换模块、d/a信号转换模块、秒脉冲同步电路和无线通信模块;
9、所述gnss接收机输出1pps秒脉冲;
10、所述秒脉冲同步电路用于校准gnss接收机1pps秒脉冲信号以及输出校准后的精同步脉冲;
11、所述a/d信号转换模块将接收相邻节点射频信号,并转换为数字信号;
12、所述d/a信号转换模块将数字信号转换为射频信号,该射频信号携带本节点时钟信息,时帧数据;
13、所述无线通信模块接收或者发送射频信号。
14、优选地,步骤s1中秒脉冲同步电路包括粗同步电路和精同步电路,所述粗同步电路校准gnss接收机1pps秒脉冲信号,所述精同步电路采样相邻节点时钟信息,与校准后1pps秒脉冲做或与运算后,输出精同步脉冲。
15、优选地,步骤s2中mac层控制接入方法步骤如下:
16、s21:自组网任意无人机作为节点,任意节点以预定周期发送握手包,任意节点接收其邻居节点发送的握手包,获取邻居节点的信息;
17、s22:任意节点发送或者接收,或者转发信息时,以时帧-时隙-mac帧由顶自下组织数据。
18、优选地,步骤s22中一个时帧包含若干个时隙,一个时隙包含若干个mac帧。
19、优选地,时隙0携带特定消息,包括同步头;节点号;邻居节点最高信噪比snr信号测量;带宽协商;时钟同步;数据类型标记,时隙n为路由表和时帧数据校验和,其中n表示最后一组时隙标号,时隙1至时隙n-1为数据内容。
20、优选地,步骤s3中路由层协议的方法步骤如下:
21、s31:存储本节点与地面控制站通信路由表;
22、s32:对接收到的信号通过路由算法处理得出迭代数据;
23、s33:根据规迭代数据以秒周期刷新路由表。
24、优选地,所述步骤s32中路由算法的方法步骤如下:
25、s321:任意节点接收并存储所有可通信节点消息,根据最短路由、信噪比、带宽三个参数寻找根节点路由;
26、s322:路由收敛以寻找根节点作为约束,对于无法实现根节点路由以8跳节点为最大路由节点;
27、s323:任意节点存储接收到的所有路由表,合并自身路由表在1个秒通信周期内发送出去;
28、s324:根据信噪比信息剔除掉失联邻居节点并更新路由表。
29、优选地,路由树的定义公式di为:
30、di={ri*0.5+snri*0.4+bi*0.1}
31、其中,i表示自组网任意节点id号;ri表示该节点与可通信所有节点路由信息;snri表示为本节点和所有可通信节点信道质量;bi表示为邻居节点带宽限制。
32、本发明中的有益效果是:
33、(1)将无人机自组网至于令牌环网之内,并做两个改进:第一,令牌环网内任意节点以路由算法为基础,可以任意改变节点位置。第二,令牌环网内的碰撞冲突概率时间被以秒脉冲到来时刻为基准做确定性延时,使得冲突检测时间转换为延时时间。将概率性获得通信时隙优化为确定性获得通信时隙,将提高系统带宽。将固定网络节点或连接方式,以路由算法为基础优化为变节点,寻找最短根节点通信路由,减少通信跳数或路由节点数,节省了系统带宽,一增一减,提升了无人机自组网通信效率,并适应了无人机自组网快速迭代的现实要求;
34、(2)由于gnss导航系统全球覆盖,在无人机自组网通信实际应用中,其作业区域相对于gnss导航信号覆盖范围相当小,在该区域内,受星历、电离层延时、对流层延时、多经干扰、接收机噪声引起的秒脉冲误差极小,而只决定于接收机秒脉冲精度。只要提高接收机秒脉冲精度,辅以粗同步和精同步运算,即可进一步提高系统通信带宽。同时,高精度的秒脉冲确保出网节点在脱网后仍然与自组网保持同步,使得入网避免了握手确认操作,提高了入网效率;
35、(3)鲁棒性提高。无人机快速移动,引起自组网路由树的快速变化,各节点需要频繁地进行路由算法迭代路由树。本发明以1秒周期作为时间限制,以最短路由根节点作为算法目标,以8跳作为路由迭代次数,从时间,算法迭代次数,迭代目标均作出限制,具有先获得根节点路由先通信,超过8跳路由权重下降特点,避免网络节点拥塞导致的通信延迟。也可以通过调制di各参数权重比,对网络进行实时优化,提高了网络适应不同作业任务现场的鲁棒性。
- 还没有人留言评论。精彩留言会获得点赞!