一种无人机的应急通讯方法和应急通讯系统与流程
本发明涉及无人机,具体涉及一种无人机的应急通讯方法。
背景技术:
1、在应对突发事件时,目前应急指挥过程中的通讯方式主要采用的是呼叫方式,即一方呼叫,另一方被动回答来进行通讯,呼叫方和回答方如果中间有山体或者建筑物阻隔,无线电波因为衰减导致沟通效果较差。
2、目前,现有技术公开了一种应急通讯方法,通过多个手台通过天线发出和接收信号,在障碍物中或者障碍物顶端增加中继器,如遇到多个手台之间有高楼山脉等阻隔时,中继器将收到的微弱信号放大后重新转发,从而增加遇到障碍物后的手台通讯效果。
3、但是上述现有的应急通讯方法中的中继器需要事先架设并且覆盖可能出现盲区。
技术实现思路
1、基于此,有必要针对基于现有的解决现有的应急通讯方法的中继器需要事先架设并且覆盖可能出现盲区的问题,提供一种无人机的应急通讯方法。
2、第一方面,本技术实施例提供了一种无人机的应急通讯,所述方法包括:
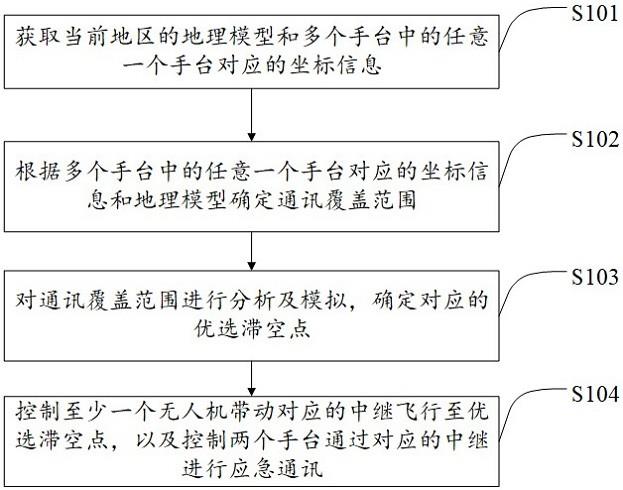
3、获取当前地区的地理模型和多个手台中的任意一个手台对应的坐标信息;
4、根据多个手台中的任意一个手台对应的坐标信息和所述地理模型确定通讯覆盖范围;
5、对所述通讯覆盖范围进行分析及模拟,确定对应的优选滞空点;
6、控制至少一个无人机带动对应的中继飞行至所述优选滞空点,以及控制两个或两个以上的手台通过对应的中继进行应急通讯。
7、在一种实施方式中,所述控制至少一个无人机带动对应的中继飞行至所述优选滞空点,包括:
8、响应于所述优选滞空点的数量为两个,选定的优选滞空点包括第一优选滞空点和第二优选滞空点,且所述无人机的数量为两个,选定的无人机包括第一无人机和第二无人机,与所述第一无人机对应的中继为第一中继,与所述无人机对应的中继为第二中继;依次获取所述第一优选滞空点对应的第一指定坐标信息、所述第二优选滞空点对应的第二指定坐标信息、所述第一无人机的第一当前坐标和所述第二无人机的第二当前坐标;
9、基于所述第一指定坐标信息、所述第二指定坐标信息、所述第一当前坐标和所述第二当前坐标,分别为所述第一无人机分配对应的第一指定点和为所述第二无人机分配对应的第二指定点;
10、基于所述第一指定点和所述第一当前坐标,确定所述第一无人机对应的第一飞行路径;以及基于所述第二指定点和所述第二当前坐标,确定所述第二无人机对应的第二飞行路径;
11、控制所述第一无人机带动所述第一中继,按照所述第一飞行路径飞行至所述第一指定点;以及控制所述第二无人机带动所述第二中继,按照所述第二飞行路径飞行至所述第二指定点。
12、在一种实施方式中,所述基于所述第一指定点和所述第一当前坐标,确定所述第一无人机对应的第一飞行路径,包括:
13、根据所述第一指定点的第一坐标信息确定对应的第一圆弧方程式,所述第一坐标信息包括第一经度信息和第一纬度信息;
14、根据所述第一坐标信息和所述第一圆弧方程式,对所述第一指定点进行细分处理,得到对应的多个第一细分航点;
15、分别获取多个第一细分航点中的每一个第一细分航点的第二坐标信息,所述第二坐标信息包括第二经度信息和第二纬度信息;
16、根据所述第一坐标信息和多个第一细分航点的第二坐标信息,确定所述第一无人机对应的所述第一飞行路径。
17、在一种实施方式中,所述基于所述第一指定点和所述第一当前坐标,确定所述第一无人机对应的第一飞行路径;以及基于所述第二指定点和所述第二当前坐标,确定所述第二无人机对应的第二飞行路径,包括:
18、获取所述第一无人机飞行环境的第一深度信息;以及获取所述第二无人机飞行环境的第二深度信息;
19、分别根据所述第一深度信息和所述第二深度信息生成对应的二维栅格地图;
20、分别获取对应的两个二维栅格地图中的每一个栅格的位置信息和对应的障碍物的位置信息;
21、依次根据对应的二维栅格地图中的每一个栅格的位置信息和对应的障碍物的位置信息,构建每个栅格与对应障碍物的势函数;
22、根据所述第一无人机的第一当前坐标、所述第二无人机的第二当前坐标、所述第一指定点、所述第二指定点、各个栅格与对应障碍物的势函数,依次生成对应的二维栅格地图中栅格的加权图,所述加权图包括与所述第一无人机对应的第一加权图和与所述第二无人机对应的第二加权图;
23、根据所述第一加权图确定所述第一无人机的第一飞行路径;以及根据所述第二加权图确定所述第二无人机的第二飞行路径。
24、在一种实施方式中,还包括:
25、实时监测所述第一中继和所述第二中继之间的中继间距,并在当前条件满足触发条件的情况下,将触发信息发送至报警装置以发出警报,所述触发条件包括所述中继间距大于预设阈值;
26、响应于所述警报,对所述第一中继和所述第二中继之间的所述中继间距进行调整,将所述中继间距调整至小于或等于所述预设阈值为止。
27、在一种实施方式中,还包括:
28、实时监测所述第一中继的信号强度,得到对应的第一监测数据;以及实时监测所述第二中继的信号强度,得到对应的第二监测数据;
29、基于所述第一监测数据和所述第二监测数据,分别对所述第一无人机的位置和所述第二无人机的位置进行调整,得到对应的调整点;
30、基于所述第一无人机的第一调整点和所述第二无人机的第二调整点,控制所述第一无人机带动所述第一中继,以及控制所述第二无人机带动所述第二中继进行位置调整。
31、在一种实施方式中,所述获取当前地区的地理模型,包括:
32、在预设数据库中查询是否有当前地区的所述地理模型;
33、响应于在所述预设数据库中查询到有当前地区的所述地理模型,从所述预设数据库中提取所述地理模型;或者,
34、响应于在所述预设数据库中未查询到当前地区的所述地理模型,基于通过飞机扫描所得的当前地区的地貌数据得到当前地区的所述地理模型。
35、在一种实施方式中,所述基于通过飞机扫描所得的当前地区的地貌数据得到当前地区的所述地理模型,包括:通过所述飞机使用激光点云扫描系统对当前地区的地貌进行扫描,得到当前地区的所述地貌数据;
36、基于所述地貌数据进行三维重建,得到当前地区的所述地理模型。
37、在一种实施方式中,所述优选滞空点的数量与所述中继的数量相等,所述优选滞空点的数量的范围为1-5个。
38、在一种实施方式中,所述中继跟对应的天线连为一个整体,或者,所述中继和对应的天线分开布置;所述中继对应的天线可水平放置,或者所述中继对应的天线可垂直放置,或者所述中继对应的天线可与地面呈现特定角度放置;所述中继在所述无人机的安装位置包括:将所述中继安装在所述无人机的机顶、机臂、机腹或者脚架上。
39、第二方面,本技术实施例提供了一种无人机的应急通讯系统,所述系统包括:
40、用于控制两个或两个以上的无人机和至少一个中继的管理平台、两个或两个以上的无人机、至少一个中继、广播手台和收听手台;
41、所述管理平台,具体用于:
42、获取当前地区的地理模型和多个手台中的任意一个手台对应的坐标信息;
43、根据多个手台中的任意一个手台对应的坐标信息和所述地理模型确定通讯覆盖范围;
44、对所述通讯覆盖范围进行分析及模拟,确定对应的优选滞空点;
45、控制至少一个无人机带动对应的中继飞行至所述优选滞空点,以及控制两个或两个以上的手台通过对应的中继进行应急通讯。
46、在本技术实施例中,获取当前地区的地理模型和多个手台中的任意一个手台对应的坐标信息;根据多个手台中的任意一个手台对应的坐标信息和地理模型确定通讯覆盖范围;对通讯覆盖范围进行分析及模拟,确定对应的优选滞空点;以及控制至少一个无人机带动对应的中继飞行至优选滞空点,以及控制两个或两个以上的手台通过对应的中继进行应急通讯。本技术实施例提供的无人机的应急通讯方法,由于对通讯覆盖范围进行分析及模拟,精准地确定对应的优选滞空点;并能够精准控制至少一个无人机带动对应的中继飞行至优选滞空点,以及控制两个或两个以上的手台通过对应的中继进行应急通讯;这样,在整个通讯方法中,不仅无需事先提前架设中继器,还能够有效地避免通讯覆盖范围可能出现盲区的现象,能够控制两个或两个以上的手台通过对应的中继进行应急通讯。
- 还没有人留言评论。精彩留言会获得点赞!