基于自适应卡尔曼滤波的UWB定位方法及相关设备
本技术涉及超宽带定位,尤其涉及一种基于自适应卡尔曼滤波的uwb定位方法及相关设备。
背景技术:
1、随着对位置感知应用程序需求的增加,面向大众的室内定位服务(indoorlocation base service,简称ilbs)越来越受到关注。在当今社会,ilbs已经无处不在,例如,它能够帮助人们在商场中快速定位商铺,同时在应急救援、消防和安全执法方面也具有重要作用。为了满足ilbs的要求,研究人员利用多种方式来实现精确的室内定位,包括wi-fi、低功耗蓝牙、陀螺仪、视觉相机和磁场等。然而,这些技术存在适应性差、成本过高、功耗较高和精度低等问题。
2、传统的uwb定位方法使用到达时间差(time difference of arrival,简称tdoa)算法进行位置解算,但是,由于环境中存在的墙体和障碍物,uwb信号会在移动站和基准站之间经过折射和反射,从而导致非视距(non line of sight,简称nlos)误差的产生。这种误差极大地降低了测距精度,进而导致定位结果出现较大的误差。此外,uwb测距还会受到实验环境、仪器硬件和人为干扰等因素的影响,产生测距异常值。这两种测距误差都表现为量测信息的异常,因此很难用准确的统计特征来描述系统噪声,这也导致了距离量测和定位解算出现异常。因此,如何在复杂室内环境中实现对目标的精准定位是亟待解决的问题。
技术实现思路
1、有鉴于此,本技术的目的在于提出一种基于自适应卡尔曼滤波的uwb定位方法及相关设备,以解决或部分解决上述问题。
2、基于上述目的,在第一方面,本技术提供了一种基于自适应卡尔曼滤波的uwb定位方法,包括:
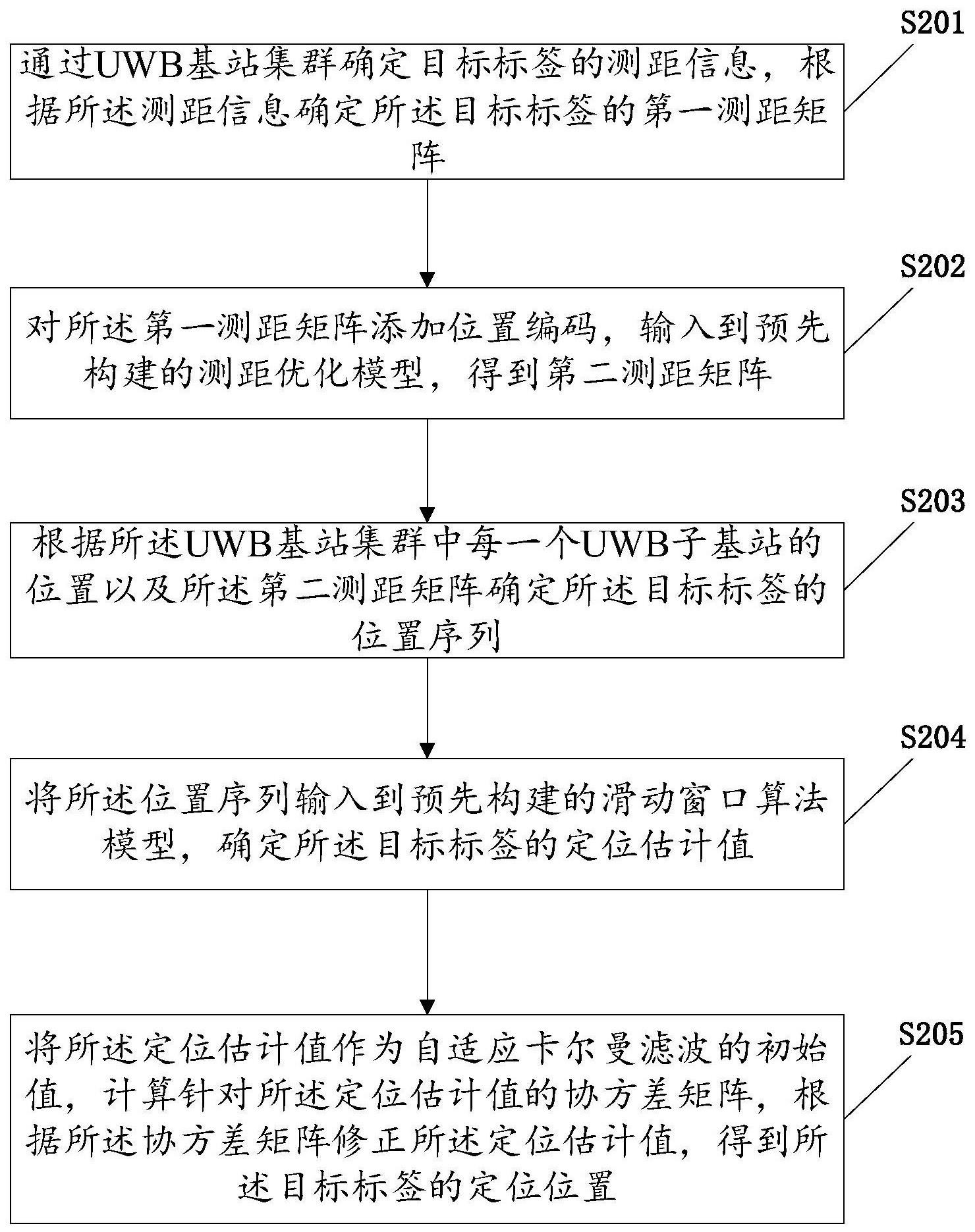
3、通过uwb基站集群确定目标标签的测距信息,根据所述测距信息确定所述目标标签的第一测距矩阵;
4、对所述第一测距矩阵添加位置编码,输入到预先构建的测距优化模型,得到第二测距矩阵;
5、根据所述uwb基站集群中每一个uwb子基站的位置以及所述第二测距矩阵确定所述目标标签的位置序列;
6、将所述位置序列输入到预先构建的滑动窗口算法模型,确定所述目标标签的定位估计值;
7、将所述定位估计值作为自适应卡尔曼滤波的初始值,计算针对所述定位估计值的协方差矩阵,根据所述协方差矩阵修正所述定位估计值,得到所述目标标签的定位位置。
8、在一种可能的实现方式中,所述通过uwb基站集群确定目标标签的测距信息,根据所述测距信息确定所述目标标签的第一测距矩阵,包括:
9、确定所述目标标签发送信号的信号发送时间;
10、确定所述uwb基站集群中每一个uwb子基站接收到所述目标标签发出的信号的信号接收时间;
11、根据所述信号发送时间以及所述信号接收时间确定预设时间间隔内的信号时间差序列;
12、根据所述信号时间差序列以及所述uwb子基站的数量确定所述目标标签的第一测距矩阵。
13、在一种可能的实现方式中,对所述第一测距矩阵添加位置编码,输入到预先构建的测距优化模型,得到第二测距矩阵,包括:
14、按照目标维度调整所述第一测距矩阵的维度,得到调整后的第一测距矩阵;
15、对所述调整后的第一测距矩阵添加位置编码,提取所述第一测距矩阵的上下文特征;
16、根据所述上下文特征处理所述调整后的第一测距矩阵,得到符合所述目标维度的第二测距矩阵。
17、在一种可能的实现方式中,所述根据所述uwb基站集群中每一个uwb子基站的位置以及所述第二测距矩阵确定所述目标标签的位置序列,包括:
18、根据所述uwb基站集群中每一个uwb子基站的位置以及所述第二测距矩阵,通过双曲线方程模型构造出含有所述目标标签的位置坐标和所述uwb子基站的位置坐标的非线性方程组;
19、根据所述非线性方程组确定所述目标标签的位置序列。
20、在一种可能的实现方式中,所述将所述位置序列输入到预先构建的滑动窗口算法模型,确定所述目标标签的定位估计值,包括:
21、确定所述滑动窗口算法模型的窗口数据量;
22、根据所述位置序列、所述窗口数据量确定所述目标标签的平均运动速度以及速度方差;
23、根据所述平均运动速度以及所述速度方差确定所述目标标签的定位估计值。
24、在一种可能的实现方式中,所述将所述定位估计值作为自适应卡尔曼滤波的初始值,计算针对所述定位估计值的协方差矩阵,根据所述协方差矩阵修正所述定位估计值,得到所述目标标签的定位位置,还包括:
25、确定所述目标标签的状态转移方程以及量测方程;
26、根据所述状态转移方程以及所述量测方程确定所述定位估计值的协方差矩阵;
27、确定针对所述定位估计值的自适应卡尔曼滤波的量测新息并根据所述量测新息以及所述协方差矩阵构建假设检验统计量;
28、根据所述假设检验统计量以及预先确定的修正阈值确定所述协方差矩阵的修正矩阵。
29、在一种可能的实现方式中,所述方法还包括:
30、响应于所述假设检验统计量不大于所述修正阈值,根据所述协方差矩阵得到所述目标标签的定位位置;
31、响应于所述假设检验统计量小于所述修正阈值,根据所述协方差矩阵的修正矩阵得到所述目标标签的定位位置。
32、基于同样的目的,在第二方面,本技术提供了一种基于自适应卡尔曼滤波的uwb定位装置,包括:
33、测距模块,被配置为通过uwb基站集群确定目标标签的测距信息,根据所述测距信息确定所述目标标签的第一测距矩阵;
34、优化模块,被配置为将所述第一测距矩阵输入到预先构建的测距优化模型,对所述第一测距矩阵添加位置编码,得到第二测距矩阵;
35、位置解算模块,被配置为根据所述uwb基站集群中每一个uwb子基站的位置以及所述第二测距矩阵确定所述目标标签的位置序列;
36、窗口模块,被配置为将所述位置序列输入到预先构建的滑动窗口算法模型,确定所述目标标签的定位估计值;
37、修正模块,被配置为将所述定位估计值作为自适应卡尔曼滤波的初始值,计算针对所述定位估计值的协方差矩阵,根据所述协方差矩阵修正所述定位估计值,得到所述目标标签的定位位置。
38、基于上述目的,本技术还提供了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任意一项所述的方法。
39、基于上述目的,本技术还提供了一种非暂态计算机可读存储介质,所述非暂态计算机可读存储介质存储计算机指令,所述计算机指令用于使所述计算机执行上述任意一项所述的方法。
40、从上面所述可以看出,本技术提供的基于自适应卡尔曼滤波的uwb定位方法及相关设备,通过uwb基站集群确定目标标签的测距信息,根据测距信息确定目标标签的第一测距矩阵,进一步地,对第一测距矩阵添加位置编码,输入到预先构建的测距优化模型,得到第二测距矩阵,根据uwb基站集群中每一个uwb子基站的位置以及第二测距矩阵确定目标标签的位置序列,将位置序列输入到预先构建的滑动窗口算法模型,确定目标标签的定位估计值,最后,将定位估计值作为自适应卡尔曼滤波的初始值,计算针对定位估计值的协方差矩阵,根据协方差矩阵修正定位估计值,得到目标标签的定位位置。本技术通过预先构建的测距优化模型,自适应的学习模型中输入数据和输出数据之间的映射关系,实现了对测距信息的优化处理,进一步地,利用新息向量和los环境下的阈值量测信息进行比较鉴别是否出现异常进一步构建量测噪声的抗差协方差矩阵,得到更准确稳定的测距信息。基于上述优化后的测距信息,利用卡尔曼滤波得到目标标签的位置和速度信息,显著提高了复杂室内环境中定位结果的鲁棒性和准确性。
- 还没有人留言评论。精彩留言会获得点赞!