一种基于图像识别的自动拍照装置的制作方法
本发明属于图像处理,具体涉及一种基于图像识别的自动拍照装置。
背景技术:
1、现实生活中由于需要拍摄不同角度的画面,存在对拍摄方向调整的需求,在传统拍摄系统中,为获取范围更广的图像画面,常常需要可以转动的控制摄像镜头能够旋转,而通常智能通过对摄像头的控制实现焦距的调整,无法实现转向,这种转向需要由拍摄者完成,或事先设置好相机的角度和大致估算出焦距以后固定拍摄装置,通过拍摄装置的摄像头定时的模式,最终拍摄的图像质量不佳,导致需要拍摄的景物不一定在摄像头的视景框内。现有的拍照装置或无法满足智能化对移动物联网的要求,因此,亟需一种新的智能化的拍照奇偶数提高图像拍摄质量。
技术实现思路
1、有鉴于此,本发明提供了一种提供图像拍摄质量、可以自动对焦和提升拍摄灵活性的基于图像识别的自动拍照装置,来解决上述存在的技术问题,具体采用以下技术方案来实现。
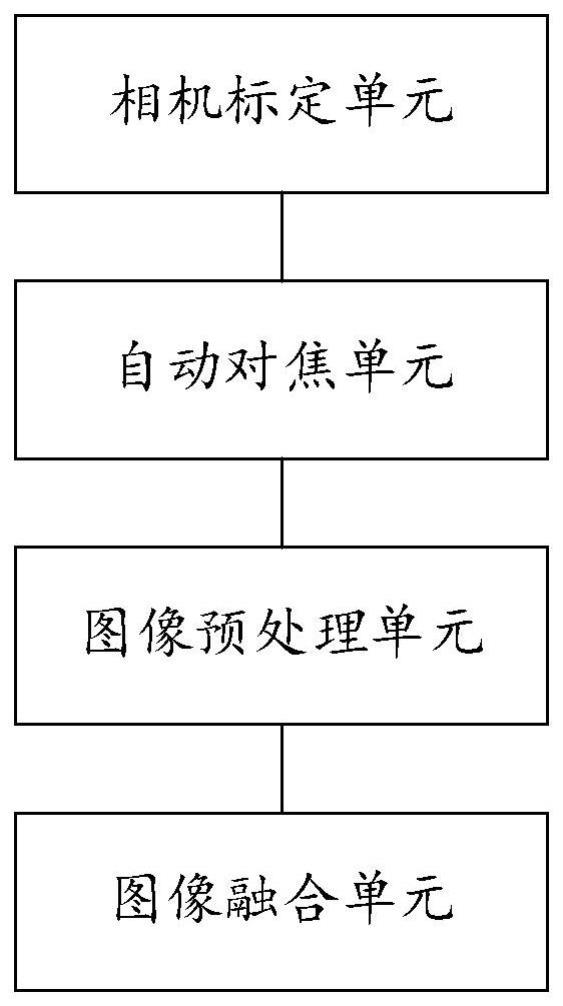
2、本发明提供了一种基于图像识别的自动拍照装置,包括:
3、相机标定单元,用于将ccd摄像机对棋盘格从不同角度和距离拍摄多福图像,通过检测棋盘格的角点来计算各个坐标系之间的对应关系以获取摄像机的标定参数,其中,棋盘格为等间距的黑白相间棋盘格,坐标系包括世界坐标系、相机坐标系和图像坐标系;
4、自动对焦单元,用于根据相机的标定参数确定成像系统的焦深和景深并实现成像系统的自动对焦以拍摄多张待测图像;
5、图像预处理单元,用于将所有待测图像进行预处理得到图像数据,其中,图像预处理包括图像滤波、背景去除和图像二值化;
6、图像融合单元,用于获取的图像数据的图像质量评价指标并使用加权来融合图像数据以获得最终图像,其中,评价指标选取标准差且标准差的表达式为m×n表示图像的像素规模,l(i,j)表示图像在坐标(i,j)处的像素值。
7、作为上述技术方案的进一步优选,获取的图像数据的图像质量评价指标并使用加权来融合图像数据以获得最终图像,包括:
8、根据图像的对比度、饱和度和曝光度生成权重,对比度由灰度图像与拉普拉斯算子求取卷积获得拉氏域图像,以得到图像上每个像素点上的值即该像素对应的对比度参数的表达式为cijk=conv(lijk,hi),其中将拉普拉斯滤波器应用于每个图像的灰度版本,并获取滤镜相应的绝对值,产生对比度的指标cijk,hi表示拉普拉斯算子的表达;
9、饱和度用于表征图像的色彩明艳程度,饱和度采用rgb模型分三个色彩通道,以计算三个色彩通道的强度标准差的表达式为其中,mij,k表示第k张图像的(i,j)位置像素上的三色彩通道上的强度平均值,sij,k表示第k张图像的(i,j)位置像素上的饱和度的值,
10、曝光度是通过权重函数映射的曝光度权重参数设为eij,k,预设对比度、饱和度和曝光度对应的指数参数为ωc、ωs和ωe,权重值的计算表达式为在使用权重值对多张图像进行融合前,将权重归一化,获得归一化的权重值多张图像根据归一化后的权重进行融合,以获得最终的显示全图细节的图像rij,其中
11、作为上述技术方案的进一步优选,将所有待测图像进行预处理得到图像数据,包括:
12、采用高斯滤波对图像进行滤波处理,高斯滤波包括将各个离散点对应的高斯函数值作为权值,对采样点做邻域加权平均,其引入的高斯函数为对图像进行高斯滤波采用高斯算子对图像进行卷积,加权平均的矩阵模板为高斯核,由二维高斯函数计算得到,维数为2k+1的离散高斯卷积核f,其矩阵元素用表达式为其中σ表示方差,由滤波窗口的宽度wih、高度het和表达式为对称的高斯核wih和het相等。
13、作为上述技术方案的进一步优选,图像二值化包括预设源图像在(u,v)处的灰度值为g(u,v),以此像素点为中心,则该像素点的阈值t(u,v)的表达式为t(u,v)=0.5×(max(g(u+i,v+j))+min(g(u+i,j+v))),即采样点的灰度值取以该像素点为中心的正方窗体区域内所有像素的灰度值序列中最大灰度值和最小灰度值的均值,对该窗体区域内的没一点用阈值t(u,v)进行二值化处理。
14、作为上述技术方案的进一步优选,采用超声波测距进行成像系统的自动对焦以完成自动拍照,成像系统的接收模块接收从目标景物反射回的信号以测量目标景物的位置,再通过测量反射信号的时间差计算出被拍摄目标的距离,从而控制镜头实现对焦,其中,超声波测距的计算表达式为d=v×t/2,d表示目标景物与成像系统的距离,v表示超声波在介质中的传播速度,t表示超声波往返时间。
15、作为上述技术方案的进一步优选,根据相机的标定参数确定成像系统的焦深和景深并实现成像系统的自动对焦以拍摄多张待测图像,包括:
16、焦深为当物平面固定时能清晰成像的像空间深度,当景物固定时,在保证成像清晰的条件下,像面沿光轴在准焦像面前后移动的距离,且该距离内产生的弥散圆在可接受范围内,则该距离为成像系统的焦深,焦深的大小由允许弥散圆的大小决定,焦深通过光学模型进行计算,δ1和δ2表示前后焦深,其表达式由三角形相似定理得到其中d表示镜头的口径,l′表示理想像距,r表示弥散图的半径,焦深δ=δ1+δ2,即
17、作为上述技术方案的进一步优选,成像系统的景深为当成像系统的像平面固定时,能清晰成像所测定的景物空间深度,计算能清晰成像的最远与最近物面的距离,前后景深的计算表达式为其中l表示对准平面到入射光瞳的距离,景深δ为当δ1<δ2,即前景深小于后景深,光圈数f、焦距f以及物距l都会影响景深,光圈数f越大,即光圈越小,景深越大;镜头焦距f越短,景深越大;拍摄距离l越远,景深越大;反之,景深越小。
18、作为上述技术方案的进一步优选,通过检测棋盘格的角点来计算各个坐标系之间的对应关系以获取摄像机的标定参数,包括:
19、图像的角点可描述为图像灰度梯度的局部最大值所对应的像素点或图像中梯度值和梯度方向的变化速率高的点,在图像上取一个预设尺寸的窗体,沿各个不同的方向移动窗体;
20、若窗体区域内像素点元灰度变化,则该区域有明显的灰度变化,则该区域中心点为角点;
21、若沿着边缘方向移动,区域内像素点无灰度变化,则确定该区域为图像边缘。
22、作为上述技术方案的进一步优选,预设高斯函数为w(x,y),窗口平移量为(m,n),图像原灰度值为l(x,y),则平移后图像的灰度值为l(x+m,y+v),其灰度变化函数为e(m,n),灰度变化函数的计算表达式为e(m,n)=∑w(x,y)[l(x+m,y+n)-l(x,y)]2。
23、作为上述技术方案的进一步优选,成像系统中的坐标系转换包括世界坐标系转换到相机坐标系、相机坐标系转换到图像物理坐标系和图像物理坐标系转换到图像像素坐标系,摄像机的标定参数包括内参矩阵、外参矩阵和畸变系数。
24、本发明提供了一种基于图像识别的自动拍照装置,通过将ccd摄像机对棋盘格从不同角度和距离拍摄多福图像,通过检测棋盘格的角点来计算各个坐标系之间的对应关系以获取摄像机的标定参数,根据相机的标定参数确定成像系统的焦深和景深并实现成像系统的自动对焦以拍摄多张待测图像,将所有待测图像进行预处理得到图像数据,获取的图像数据的图像质量评价指标并使用加权来融合图像数据以获得最终图像,采用图像识别技术和自动对焦来提升图像拍摄质量和拍摄灵活性,一定程度上也提高了使用体验。
- 还没有人留言评论。精彩留言会获得点赞!