汽车的远程控制系统及远程控制方法与流程
本技术涉及汽车远程控制,具体涉及一种汽车的远程控制系统及远程控制方法。
背景技术:
1、基于车联网的车辆远程控制系统,使车主无需走近车辆就能对车辆进行远程开闭车门锁、远程寻车、开启空调、启动发动机、断油断电等远程操控。车辆远程控制功能可以增加用车的便捷和舒适。车辆远程控制系统的优劣指标,主要体现在三方面:一是从业务触发到车辆操作执行完成所需的时间,时间越短则用户体验越好;二是功能的稳定性,即在通讯信号不稳定情况下提供服务的质量水平;三是服务的安全性,即服务本身不能造成用户生命财产安全问题。
2、目前,现有技术一般采用短信或者互联网的方式下发指令。通过短信下发指令,该种方式依赖于短信发送的成功率,一旦短信实际发送失败,将影响远程控制指令的送达率。而使用互联网发送远程控制指令能较好的解决短信时效性的问题,但对远程控制系统稳定性有较高的要求。如果出现网络丢包或者业务报错的话,容易导致远程控制指令发送车端失败。因此,现有技术的车辆远程控制技术存在远程控制指令送达率较低的问题。
技术实现思路
1、本技术实施例的目的是提供一种汽车的远程控制系统及远程控制方法,用以解决现有技术的车辆远程控制技术中远程控制指令送达率较低的问题。
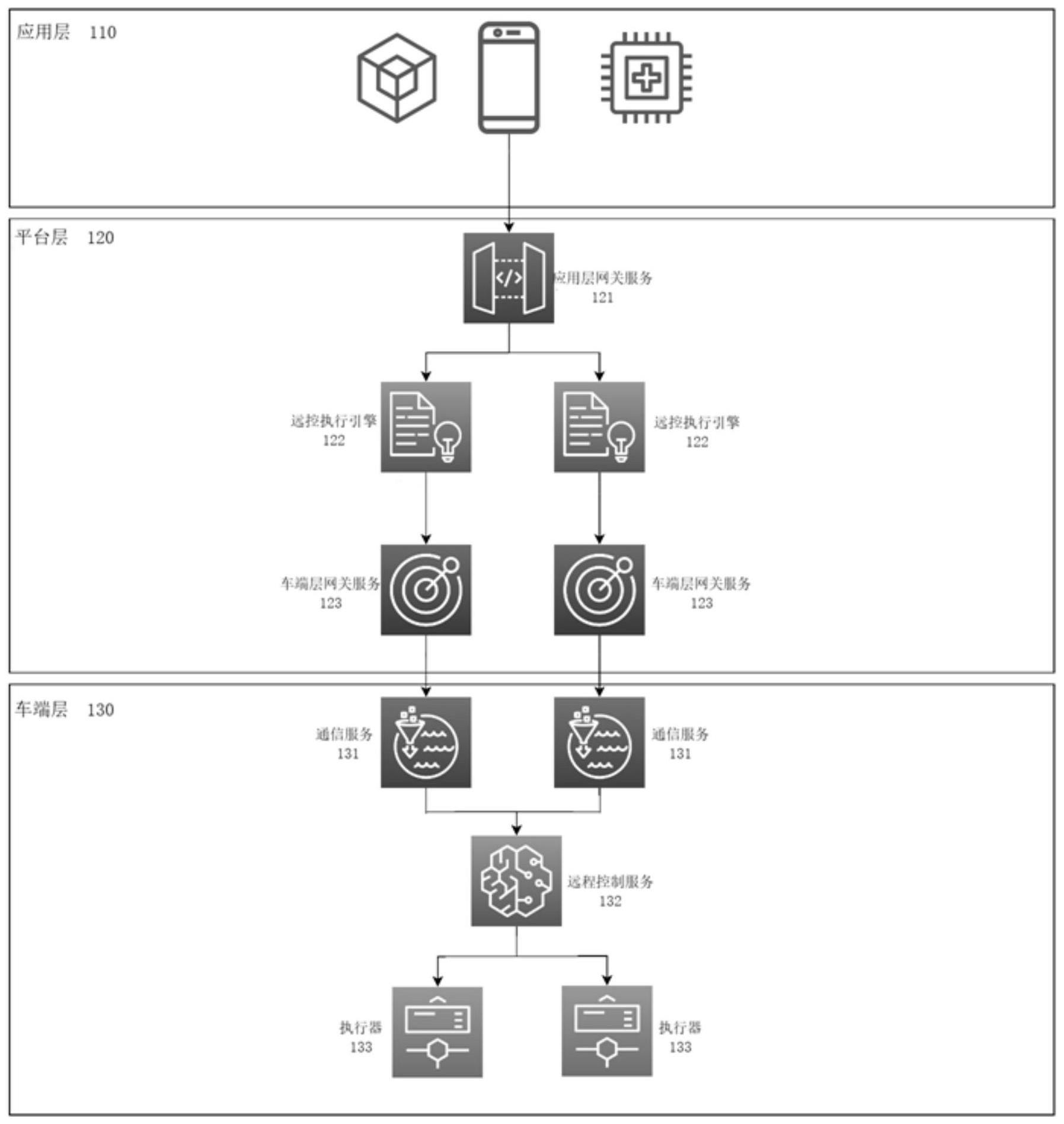
2、为了实现上述目的,本技术第一方面提供一种汽车的远程控制系统,包括:
3、应用层,被配置成发送远程控制请求;
4、平台层,与应用层通信,被配置成将远程控制请求转换为多个远程控制指令,并将多个远程控制指令发送至车端层,
5、其中,平台层包括:
6、应用层网关服务,与应用层通信,被配置成接收并复制应用层发送的远程控制请求,以得到多个远程控制请求,并通过多个消息队列发送多个远程控制请求至多个远程控制执行引擎;
7、多个远程控制执行引擎,与应用层网关服务通信,每个远程控制执行引擎被配置成将接收到的远程控制请求转换为远程控制指令,并发送远程控制指令至对应的车端层网关服务;
8、多个车端层网关服务,与多个远程控制执行引擎通信,每个车端层网关服务被配置成将接收到的远程控制指令转发至车端层;
9、车端层,与平台层通信,被配置成接收多个远程控制指令,对多个远程控制指令进行幂等操作,以得到目标远程控制指令,并执行目标远程控制指令。
10、在本技术实施例中,车端层包括:
11、多个通信服务,与多个车端层网关服务通信,每个通信服务被配置成接收对应的车端层网关服务转发的远程控制指令;
12、远程控制服务,与多个通信服务通信,被配置成对多个远程控制指令进行幂等操作,得到目标远程控制指令,并解析目标远程控制指令,以得到解析后的目标远程控制指令;
13、执行器,与远程控制服务通信,被配置成执行解析后的目标远程控制指令。
14、在本技术实施例中,执行器包括主执行器和备用执行器,远程控制服务还被配置成:
15、判断与主执行器的通信是否正常;
16、在判定与主执行器的通信正常的情况下,调用主执行器;
17、在判定与主执行器的通信异常的情况下,调用备用执行器,并判断调用备用执行器是否成功,在调用备用执行器失败的情况下,发送远控失败提醒。
18、在本技术实施例中,车端层包括:
19、唤醒服务,被配置成在车端层未连接平台层的情况下,唤醒车端层。
20、在本技术实施例中,唤醒服务还被配置成:
21、获取车端层的物联网卡号;
22、根据物联网卡号对车端层进行短信唤醒,并判断短信唤醒是否成功;
23、在判定短信唤醒未成功的情况下,重新对车端层进行短信唤醒,直至唤醒成功或者短信唤醒的重试次数达到第一预设次数;
24、在短信唤醒的重试次数达到第一预设次数的情况下,对车端层进行振铃唤醒,并判断振铃唤醒是否成功;
25、在判定振铃唤醒未成功的情况下,重新对车端层进行振铃唤醒,直至唤醒成功或者振铃唤醒的重试次数达到第二预设次数;
26、在振铃唤醒的重试次数达到第二预设次数的情况下,返回唤醒失败结果。
27、在本技术实施例中,每个远程控制执行引擎包括:
28、路由服务,与唤醒服务通信,被配置成判断车端层是否连接平台层,在车端层未连接平台层的情况下,调用唤醒服务,以唤醒车端层。
29、在本技术实施例中,每个远程控制执行引擎包括:
30、数据转换服务,与应用层网关服务通信,被配置成将接收到的远程控制请求转换为远程控制指令;
31、存储服务,与数据转换服务通信,被配置成存储远程控制指令。
32、在本技术实施例中,平台层还包括全局服务,全局服务被配置成:
33、判断平台层是否接收到历史数据查询指令;
34、在判定平台层接收到历史数据查询指令的情况下,对历史数据查询指令对应的历史数据进行幂等操作。
35、在本技术实施例中,平台层还被配置成:
36、判断远程控制指令是否丢失;
37、在远程控制指令丢失的情况下,通过超时服务查询存储服务中存储的远程控制指令,以确定超时远控指令,并重新发送超时远控指令。
38、本技术第二方面提供一种汽车的远程控制方法,应用于汽车的远程控制系统,远程控制系统包括应用层、平台层和车端层,平台层分别与应用层和车端层通信,平台层包括应用层网关服务、多个远程控制执行引擎和多个车端层网关服务,应用层网关服务与应用层通信,多个远程控制执行引擎分别与应用层网关服务和多个车端层网关服务通信,该远程控制方法包括:
39、通过应用层发送远程控制请求;
40、通过应用层网关服务接收并复制应用层发送的远程控制请求,以得到多个远程控制请求,并通过多个消息队列发送多个远程控制请求至多个远程控制执行引擎;
41、通过多个远程控制执行引擎中的每个远程控制执行引擎将接收到的远程控制请求转换为远程控制指令,并发送远程控制指令至对应的车端层网关服务;
42、通过多个车端层网关服务中的每个车端层网关服务将接收到的远程控制指令转发至车端层;
43、通过车端层接收多个远程控制指令,对多个远程控制指令进行幂等操作,以得到目标远程控制指令,并执行目标远程控制指令。
44、本技术的有益效果:
45、(1)本技术通过多个消息队列发送多个远程控制请求至多个远程控制执行引擎,能够提高远程控制指令的送达率;
46、(2)本技术通过车端层对多个远程控制指令进行幂等操作,以得到目标远程控制指令,能够降低车端层重复执行相同的远程控制指令的可能性;
47、(3)本技术通过超时服务判断远程控制指令是否丢失,在丢失时确定超时远控指令并重新发送,能够进一步提高远程控制指令的送达率。
48、本技术实施例的其它特征和优点将在随后的具体实施方式部分予以详细说明。
- 还没有人留言评论。精彩留言会获得点赞!