无人驾驶矿用卡车循迹行驶转向中位标定方法及系统与流程
本发明涉及无人驾驶,具体为无人驾驶矿用卡车循迹行驶转向中位标定方法及系统。
背景技术:
1、现有的车辆中位值标定方案一般是通过获取方向盘转角,以及转向电机所反馈的前轮转角,通过人工驾驶跑直线来进行车辆的转向中位值标定,或者是通过检测前轮转角反馈来判断当前是不是处于有速走直线的状态。但是这两种方案没办法确定当前走的直线是否真的是理想的直线,而且不能获取一个较为准确的到底偏差多少的值,来进行对中位值的调节,需要多次跑直线才能完成标定,导致效率较低而且准确度不高,本提案通过软件生成一条基于坐标点的直线路径,然后获取车辆在跑直线过程中与生成路径的实际横向偏差,通过横向偏差的数据来计算车辆需要进行标定的前轮中位偏差转角,规避了人工驾驶标定下的走直线只能依靠感觉,以及没有准确的标定数据这种问题。
技术实现思路
1、鉴于上述存在的问题,提出了本发明。
2、因此,本发明解决的技术问题是:主要解决了无人驾驶矿车在自动驾驶过程中的横向偏差问题,通过实时检测和自动标定中位值,提高了无人驾驶的安全性和效率。
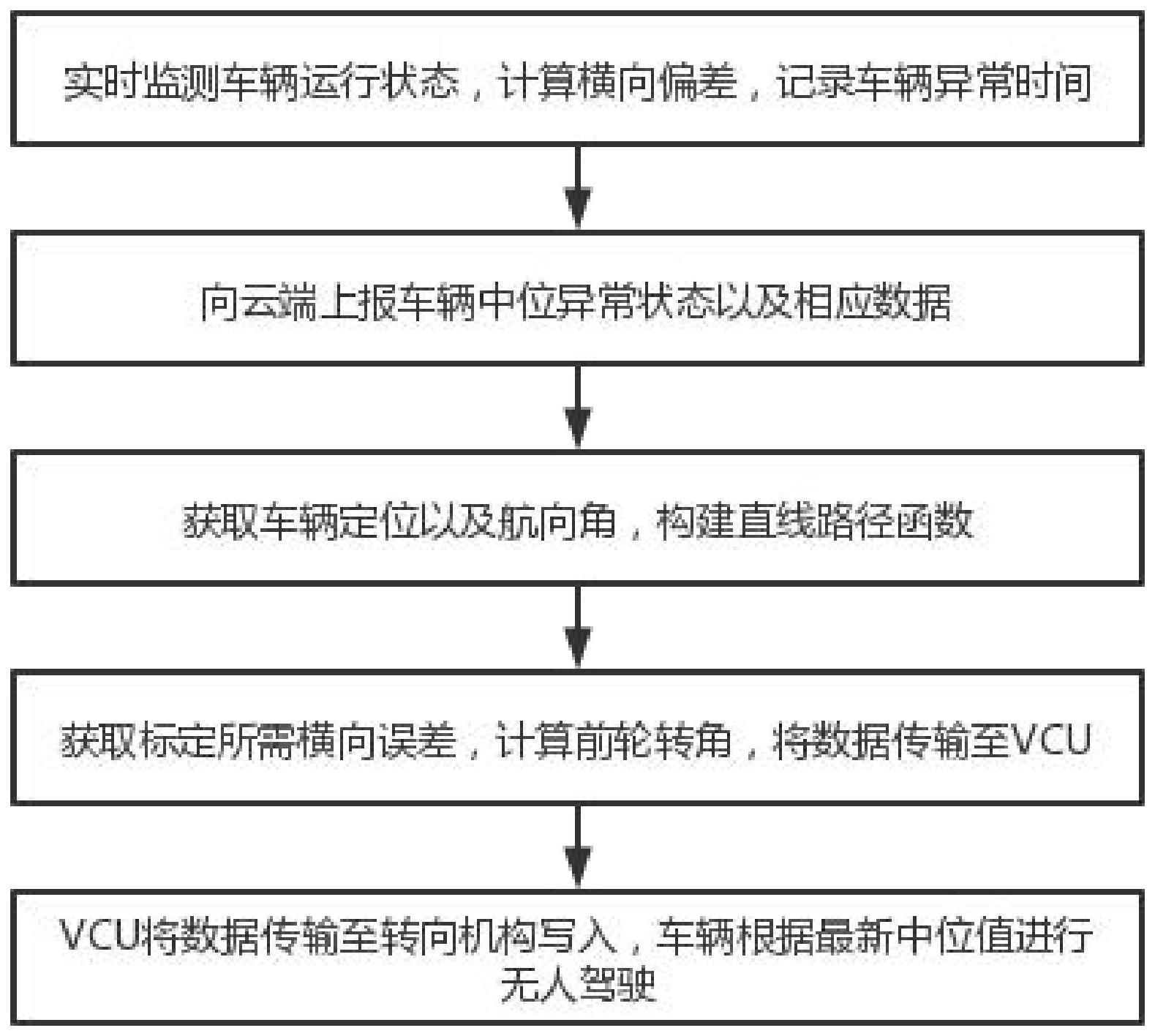
3、为解决上述技术问题,本发明提供如下技术方案:无人驾驶矿用卡车循迹行驶转向中位标定方法,其包括如下步骤,实时监测车辆运行状态,计算横向偏差,记录车辆异常时间;向云端上报车辆中位异常状态以及相应数据;获取车辆定位以及航向角,构建直线路径函数;获取标定所需横向误差,计算前轮转角,将数据传输至vcu;vcu将数据传输至转向机构写入,车辆根据最新中位值进行无人驾驶。
4、作为本发明所述的无人驾驶矿用卡车循迹行驶转向中位标定方法的一种优选方案,其中:所述实时监测车辆运行状态,计算横向偏差包括无人驾驶矿卡在自动驾驶过程中,规划模块通过规划算法输出一条车辆需要进行循迹行驶的目标路径,通过获取车辆的定位信息以及车辆距离最近的规划生成的路径点的定位点信息,通过计算得到实时横向误差,表达式为:
5、
6、其中,a1,b1是车辆的实时定位信息,以矿车后轴中心为原点,车体后轴中心的x轴指向矿车前进方向,y轴指向车体右侧,z轴向下,a2,b2是规划模块生成的路径上距离车辆最近的路径点的坐标,对应xy坐标系下的横轴和纵轴的值;当车辆位于道路左侧时d为正值,车辆位于道路右侧时d为负值,当检测到横向误差的变化率d-di小于设定值时,且d和di的正负值相等,则判定车辆一直处在规划生成路径的左侧或者右侧,车辆处于固定横向偏差状态,di为上一周期车辆横向误差;当车辆处于固定横向偏差状态时,中位值异常检测计数器开始标记,每个程序进行周期性运行,计数器记录增加1,若中位值异常检测计数器数值大于设定范围,无人驾驶系统在存储器记录转向中位值异常。
7、作为本发明所述的无人驾驶矿用卡车循迹行驶转向中位标定方法的一种优选方案,其中:所述向云端上报车辆中位异常状态包括当检测到存储器有转向中位异常状态时,将中位标定状态以及车辆检测到的异常数据到云控平台,通过网络进行数据传输并且标注异常所发生时间以及路段信息;所述相应数据包括车辆的横向偏差、车辆的前轮转角控制指令以及车辆反馈的前轮转角执行角度,云控平台将异常数据进行可视化,将异常数据以图表的形式展开;技术人员通过云控平台的分析软件查看异常数据图表,调取正常数据图表进行重合度比对,若重合度小于设定阈值则判定正常,云控平台向矿卡终端发送停止标定指令控制矿卡终端继续检测横向偏差,若大于设定阈值则判定异常,云控平台向矿卡终端发送允许标定指令控制矿卡终端获取车辆定位以及航向角,构建直线路径函数。
8、作为本发明所述的无人驾驶矿用卡车循迹行驶转向中位标定方法的一种优选方案,其中:所述获取车辆定位以及航向角是通过车身安装的惯导,获取车辆实时航向角以及车辆当前定位点,通过卡尔曼滤波对实时获取的航向角进行处理,将跳变大于预设范围的航向角进行过滤处理;
9、所述构建直线路径函数的表达式为:
10、x=x0+yaw*a
11、y=y0+yaw*b
12、其中,x,y为车辆需要跟随路径点坐标,x0,y0为车辆初始位置坐标,yaw为车辆当前的航向角,a,b为调节参数。
13、作为本发明所述的无人驾驶矿用卡车循迹行驶转向中位标定方法的一种优选方案,其中:所述获取标定所需横向误差包括无人驾驶矿车按照生成的直线轨迹进行沿路径行驶,直线路径由自主开发的中位标定路径生成软件生成;所述路径包括路径的定位点信息,航向信息以及路径点的id号;按照预设采样频率采集定位数据,将采集到的定位数据做车辆横向误差计算的输入值,通过横向误差计算出前轮转角,路径生成之后无人驾驶系统获取路径道路点id的最大值,通过实时收集的信息与输入到无人驾驶系统的路径道路点的道路点id进行大小对比,当输入的路径点id与生成道路最大id相等时,完成车辆沿直线行驶阶段,记录横向误差。
14、作为本发明所述的无人驾驶矿用卡车循迹行驶转向中位标定方法的一种优选方案,其中:所述计算前轮转角是使用斯坦利算法的横向误差转换,通过前轮中心的路径跟踪偏差量对方向盘转向控制量进行计算;
15、所述前轮转角的控制量包括由航向误差引起的转角,当前车身方向与参考轨迹最近的点的切线方向的夹角以及由横向误差引起的转角,前轮中心到参考轨迹最近点的横向距离;
16、当不考虑航向跟踪偏差的情况下,横向跟踪误差越大,前轮转向角越大,车辆预期轨迹在距离前轮处与给定路径上最近点切线相交,计算标定中位值所需要的前轮转角,表达式为:
17、
18、其中,α是前轮转角,v为车辆的车速,k为调节参数,d为稳定之后的横向误差。
19、作为本发明所述的无人驾驶矿用卡车循迹行驶转向中位标定方法的一种优选方案,其中:所述vcu接收到标定值时,将数据发送给转向机构进行数据写入,转向机构将新的中位值写入自身内部存储器,初始化之后,车辆以新的中位值进行正常的无人驾驶跑车。
20、本发明的另外一个目的是提供无人驾驶矿车的自动中位值标定系统,其能通过实时检测横向偏差并自动进行中位值标定,解决了现有系统中需要人工干预和可能出现误差的问题。
21、为解决上述技术问题,本发明提供如下技术方案:无人驾驶矿用卡车循迹行驶转向中位标定方法,包括云控平台每一辆矿用卡车上设置有矿用卡车终端,云控平台通过无线方式与矿用卡车终端进行数据通信,矿用卡车终端包括中心控制模块、定位模块、规划模块、异常检测模块、内部通讯模块、转向模块以及外部通讯模块,定位模块、规划模块、异常检测模块、内部通讯模块、转向模块以及外部通讯模块分别通过通讯模块与中心控制模块连接;所述中心控制模块是负责控制车辆的自动驾驶,接收来自每一个模块的数据;所述定位模块是负责获取车辆的实时定位信息以及航向角信息;所述规划模块是通过规划算法输出一条车辆需要进行循迹行驶的目标路径,同时生成距离车辆最近的路径点的定位点信息;所述异常检测模块是负责检测车辆是否处于固定横向偏差状态,当检测到固定偏差时,累计异常时长,当异常时长超过设定阈值时,存储器记录转向中位值异常;所述内部通讯模块是负责系统内部的通讯,将数据从一个模块发送到另一个模块,以及将十进制数据转换为十六进制数据;所述转向模块是转向机构接收来自vcu的数据,并将新的中位值写入自身内部存储器;所述外部通讯模块是负责外部的通讯,将矿用卡车的数据发送至云控平台,并接受云控平台发送的数据。
22、一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如上所述无人驾驶矿用卡车循迹行驶转向中位标定方法的步骤。
23、一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如上所述无人驾驶矿用卡车循迹行驶转向中位标定方法的步骤。
24、本发明的有益效果:本发明通过实时检测和自动标定中位值,提高了无人驾驶矿车的驾驶精度和工作效率,同时通过实时异常检测和自动上报,增强了系统的安全性。此外,它还通过使用定制的通讯协议和数据格式转换,提高了系统的通讯效率和准确性,降低了对人工干预的需求。
- 还没有人留言评论。精彩留言会获得点赞!