一种自动跟踪聚焦抓拍方法、系统、存储介质及程序与流程
本发明属于无人机图像处理,尤其涉及一种自动跟踪聚焦抓拍方法、系统、存储介质及程序。
背景技术:
1、一般情况下,为了获得较大的视野范围,摄像头以较小的焦距观察整个画面,可以获取大多数物体的一般特征,然而该特征不具有足够的唯一准确性,因而不能作为一定的依据进行存储。如在高速公路无人机巡检的过程中,无人机在120米左右高空飞行,摄像头焦距保持在3~4倍,通过对车道线及车辆的智能识别,从而发现某辆车的违法行车行为(占用应急车道、货车占用客车道等),但所发现的车辆特征不足以作为处罚依据;同样的,在河道巡检发现生活及建筑垃圾的项目中,无人机以一定高度飞行,保持小焦距巡检发现疑似垃圾,但在该画面中的疑似垃圾并不能作为准确的证据。
2、人眼观察某一特定事物的过程依次为,先在大场景中发现疑似目标,继而眼睛聚焦在该目标上,其内部机理涉及到目标的跟踪及焦距的增大。类比人眼观察某一特定事物的过程:采用人工跟踪聚焦方式,即人工调整摄像头角度跟踪目标同时逐渐调大焦距聚焦到特定目标(违法行车车辆或疑似垃圾)进行常规的抓拍,但该种方式存在对操作人员的熟练程度要求较高、操作过程中的操作误差较大、人工工作量繁重等问题,造成聚焦抓拍效果下降。
3、设计一种通用的针对特定目标的自动跟踪聚焦抓拍方法,是人工智能技术在常规的基于视觉画面的巡检领域中的必然需求。
4、与之相关的现有技术如下:
5、现有技术一
6、现有的目标跟踪聚焦抓拍方法采用人工跟踪聚焦方式,即人工调整摄像头角度跟踪目标同时逐渐调大焦距聚焦到特定目标进行常规的抓拍。
7、现有技术二
8、现有的卡口设备对目标车牌的抓拍采用固定的角度及焦距,即只对特定位置特定距离的违法行车行为进行车牌的抓拍识别。
9、通过上述分析,现有技术存在的问题及缺陷为:
10、(1)现有技术一,对操作人员的熟练程度要求较高:对于没有想关操作经验的人员来说,实现该人工跟踪聚焦方式基本不可能,熟练程度的培训至少需一个月时间。
11、操作过程中的操作误差较大:即使是对于熟练人员来说,采用操作杆进行摄像头角度调整进而跟踪目标仍然会由于每次施加力量的不同而导致跟踪存在较大的误差。
12、人工工作量繁重:当存在较多需要跟踪聚焦的目标时,操作员需要时时进行摄像头角度及焦距的调整,这是一项非常繁重的工作。
13、(2)现有技术二,固定的卡口设备只对特定位置特定距离的违法行车行为进行车牌的抓拍识别,有一定的局限性,此范围外的违法行车行为则无法抓取。
14、不具备跟踪功能,在特定位置未抓取到目标后则此次抓取识别失败。
技术实现思路
1、为了解决现有技术存在的问题,本发明提供了一种自动跟踪聚焦抓拍方法、系统、存储介质及程序,具体涉及一种对特定目标的自动跟踪聚焦抓拍方法及抓拍系统。
2、本发明是这样实现的,一种自动跟踪聚焦抓拍方法,包括:
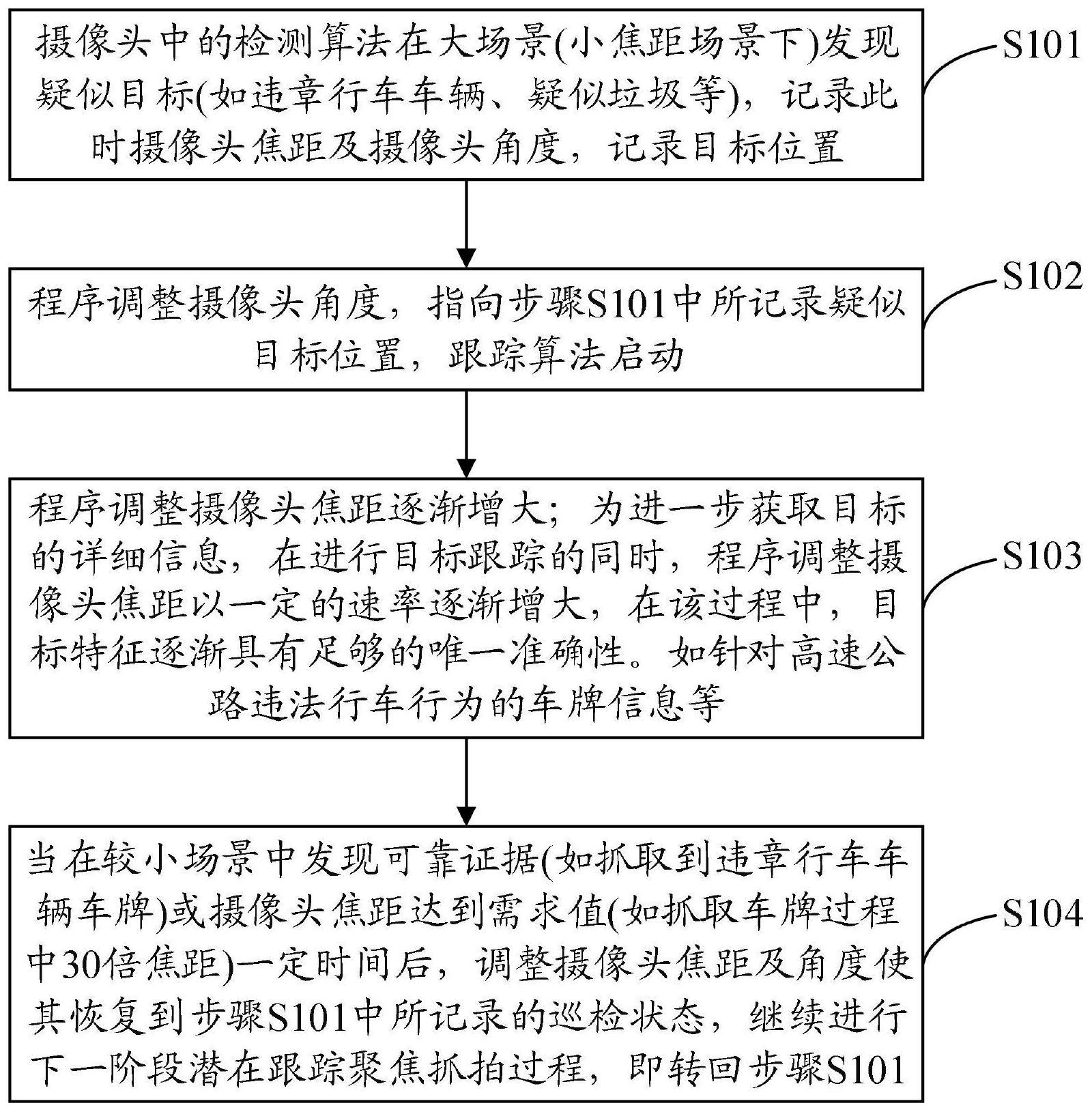
3、通过无人机携带的摄像头在大场景下抓拍疑似目标,并确定疑似目标位置,同时记录摄像头在大场景下的焦距和角度;所述疑似目标为违章行车车辆或河道垃圾;所述无人机按照既定路线飞行;
4、调整所述摄像头的角度,使所述摄像头指向所述疑似目标位置;
5、按照一定的速率逐渐增大所述摄像头的焦距,并实时获取所述疑似目标的详细信息;
6、对所述疑似目标的详细信息进行唯一准确性确认,若唯一准确性确认通过,则采用识别算法进行可靠证据识别;
7、在识别到可靠证据或所述摄像头的焦距到达需求值一定时间后,调整所述摄像头的焦距及角度,使所述摄像头的焦距及角度恢复至大场景下的焦距和角度,继续进行大场景下的疑似目标抓拍过程。
8、进一步地,调整所述摄像头的角度,使所述摄像头指向所述疑似目标位置,具体包括:
9、不断调整所述摄像头的角度,使所述疑似目标始终保持在所述摄像头的画面中;所述摄像头水平方向进行360°自由旋转,竖直方向进行+60°至-120°之间调整,以实时跟踪所述疑似目标。
10、进一步地,所述违章行车车辆包括占用应急车道违法车辆及货车占用客车道违法车辆。
11、进一步地,在所述疑似目标为违章行车车辆时,所述可靠证据为违章行车车辆车牌。
12、本发明的另一目的在于提供一种自动跟踪聚焦抓拍系统,包括:
13、摄像头,设置在无人机上,用于通过内置的检测算法在大场景下抓拍疑似目标,并确定疑似目标位置,同时记录摄像头在大场景下的焦距和角度;所述疑似目标为违章行车车辆或河道垃圾;所述无人机按照既定路线飞行;
14、跟踪算法启动模块,用于调整所述摄像头的角度,使所述摄像头指向所述疑似目标位置;
15、焦距调整模块,用于按照一定的速率逐渐增大所述摄像头的焦距,并实时获取所述疑似目标的详细信息;
16、巡检状态恢复模块,用于对所述疑似目标的详细信息进行唯一准确性确认,若唯一准确性确认通过,则采用识别算法进行可靠证据识别,在识别到可靠证据或所述摄像头的焦距到达需求值一定时间后,调整所述摄像头的焦距及角度,使所述摄像头的焦距及角度恢复至大场景下的焦距和角度,继续进行大场景下的疑似目标抓拍过程。
17、本发明的另一目的在于提供一种接收用户输入程序存储介质,其存储有计算机程序,所述计算机程序使电子设备执行上述的自动跟踪聚焦抓拍方法
18、本发明的另一目的在于提供一种存储在计算机可读介质上的计算机刻度程序产品,所述计算机可读程序供于电子装置上执行时,提供用户输入接口以实施所述的自动跟踪聚焦抓拍方法。
19、结合上述的所有技术方案,本发明所具备的优点及积极效果为:本发明提供了一种通用的针对特定目标的自动跟踪聚焦抓拍方法,解决了人工跟踪聚焦方式中存在的对操作人员熟练程度要求较高、操作过程中的操作误差较大、人工工作量繁重等问题;同时对卡口设备的静态抓拍识别方法进行补充,在对特定目标进行跟踪的同时持续抓拍识别,进一步提高了抓拍识别的成功率。
技术特征:
1.一种自动跟踪聚焦抓拍方法,其特征在于,所述自动跟踪聚焦抓拍方法包括:
2.根据权利要求1所述的自动跟踪聚焦抓拍方法,其特征在于,调整所述摄像头的角度,使所述摄像头指向所述疑似目标位置,具体包括:
3.根据权利要求1所述的自动跟踪聚焦抓拍方法,其特征在于,所述违章行车车辆包括占用应急车道违法车辆及货车占用客车道违法车辆。
4.根据权利要求1所述的自动跟踪聚焦抓拍方法,其特征在于,在所述疑似目标为违章行车车辆时,所述可靠证据为违章行车车辆车牌。
5.一种自动跟踪聚焦抓拍系统,其特征在于,所述自动跟踪聚焦抓拍系统包括:
6.一种接收用户输入程序的存储介质,其特征在于,其存储有计算机程序,所述计算机程序使电子设备执行权利要求1至4任意一项所述的自动跟踪聚焦抓拍方法。
7.一种存储在计算机可读介质上的计算机可读程序,其特征在于,所述计算机可读程序供于电子装置上执行时,提供用户输入接口以实施如权利要求1至4任意一项所述的自动跟踪聚焦抓拍方法。
技术总结
本发明属于无人机图像处理技术领域,公开了一种自动跟踪聚焦抓拍方法、系统、存储介质及程序,通过无人机携带的摄像头在大场景下记录抓拍的疑似目标位置,同时记录当前摄像头的焦距和角度;调整摄像头角度,使摄像头指向疑似目标位置;按照一定的速率逐渐增大摄像头的焦距,并实时获取疑似目标的详细信息;对获取的疑似目标的详细信息进行唯一准确性确认,若唯一准确性确认通过,则采用识别算法进行可靠证据识别;在识别到可靠证据或摄像头的焦距到达需求值一定时间后,调整摄像头的焦距及角度,使摄像头的焦距及角度恢复至大场景下的焦距和角度,继续进行大场景下的疑似目标抓拍过程。本发明降低了人工工作量,并提高了抓拍识别成功率。
技术研发人员:刘沿,李志刚
受保护的技术使用者:西安智文琛软件有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!