基于EtherCAT的同步采集系统及方法与流程
本发明涉及一种同步采集系统,具体为一种基于ethercat的同步采集系统,属于同步采集。
背景技术:
1、一般而言,大型机械设备在工作过程中,会对其机械振动状态进行分析,需要同一时刻采集多个振动测点,而多点位振动数据的高精度同步采集,对大型机械设备的仿真和一致性分析至关重要。
2、现有技术中,1)公开号为cn112711202a所公开的一种ethercat从站模块,其包括硬件和装载在硬件上的驱动程序,ethercat从站模块通过上述mcu接口驱动程序能够实现多种脉冲模式输出;
3、2)公开号为cn112667532a所公开的一种基于dsp处理器的ethercat从站控制器及通信方法。其利用dsp处理器的第一接口与ethercat从站控制器进行连接,能够高效地进行dsp处理器与ethercat从站控制器之间的数据传输,ethercat从站控制器通过多个中断接口与dsp处理器进行同步信号的传输,有效提高信号传输效率,实现低成本、通用性强以及可配置性高的从站控制器;
4、3)公开号为cn110266421a所公开的一种多通道同步采集相位校准系统及方法,其将参考通道对应的目标相位信息与剩下通道对应的目标相位信息进行比较,根据比较结果输出控制参数至可编程时钟延时模块,以使所述可编程时钟延时模块根据所述控制参数校准所述多路时钟网络信号,从而实现多路时钟网络信号的校准;
5、4)公开号为cn111856993a所公开的一种模拟信号多通道同步采集系统及其采集方法,其在信号采集输入单元进行信号采集时,生成单元生成虚拟信号,通过模拟信号定时发送模块进行定时发送模拟信号,通过插入虚拟信号的方式对采集系统进行自检,对生产的和经过采集系统转换后的信息进行对比,可以对采集系统所采集信息的完整性进行校验,安全性更高,不容易出现误差;
6、5)公开号为cn215493858u所公开的一种用于避雷器在线监测系统的高精度同步采集装置,其根据锁定到的所述标准时间脉冲信号和所述采样启动信号完成对时,可以提高对避雷器泄漏电流在线监测的精度;
7、6)公开号为cn216286236u所公开的一种基于fpga的信号采集控制从站系统,每个从站单元包括通信相连接的ad模块、fpga主控单元和ethercat工业以太网模块;使用fpga实现采集通道选择和增益控制;使用ethercat工业以太网模块实现多从站的数据同步采集;采用ethercat作为从站协议,板卡可实现数据同步传输;使用多个从站的设计构成从站系统。
8、由现有技术可知,对于多通道同步采集设备中,为了保证采集的同步性,主要分为两种方案:一种方案采用fpga/dsp同时给多片ad芯片下发采集指令;另一种方案通过北斗授时装置的标准时间脉冲信号向采集装置下发采集指令。其中,第一种方案产生的偏差主要来源于fpga/dsp的配套晶振与不同ad芯片的sync同步信号,该方案同步采集偏差为微妙级;第二种方案产生的偏差为纳秒级,但该方案需要周期性地与北斗系统进行时间同步,不适合用于某些网络封闭环境下的使用场景。
技术实现思路
1、本发明的目的就在于为了解决上述至少一个技术问题而提供一种基于ethercat的同步采集系统。
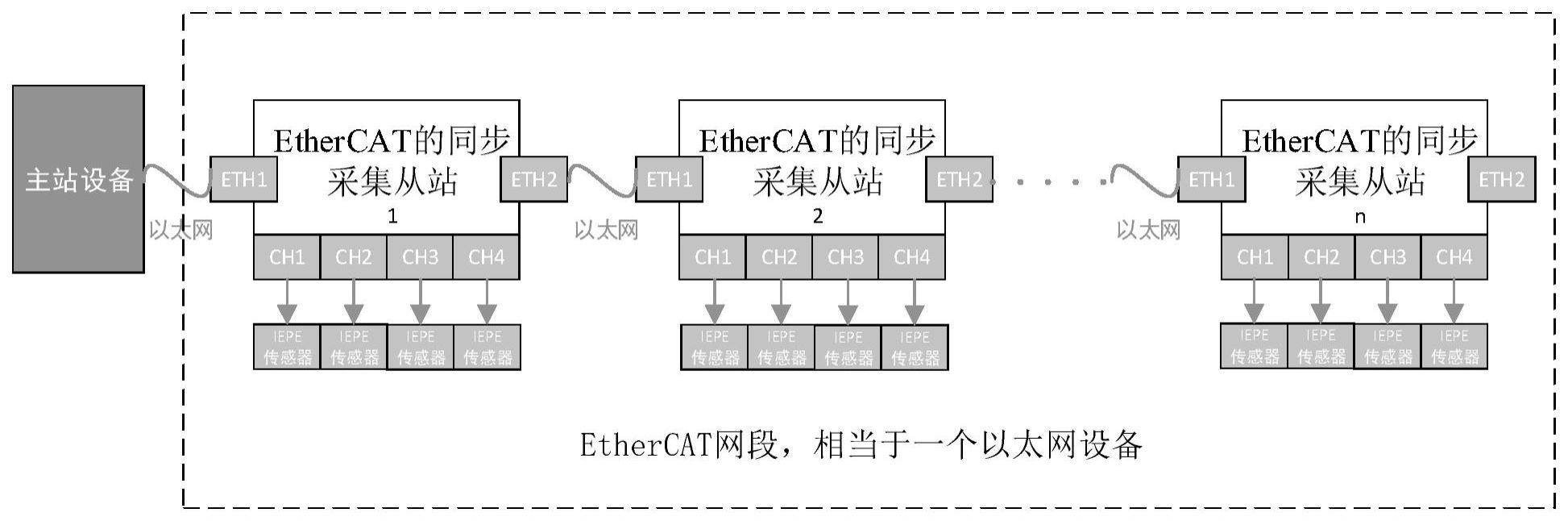
2、本发明通过以下技术方案来实现上述目的:一种基于ethercat的同步采集系统,同步采集系统包括主站设备和多个支持ethercat的同步采集的从站设备;
3、同步采集系统通过ethercat从站控制器的同步时钟进行同步采集;
4、主站设备包括带有以太网接口的设备和在该设备上安装ethercat配套的twincat3上位机软件,从站设备包括两个ethercat工业以太网接口和具有四个采集通道接口的iepe振动传感器;
5、主站设备与从站设备的连接模式包括直连模式和开放模式;
6、主站设备与从站设备分布式安装。
7、作为本发明再进一步的方案:直连模式为一个主站设备与若干个从站设备连接,若干个从站设备通过以太网连接并构成一个以太网设备。
8、作为本发明再进一步的方案:开放模式为多个主站设备与若干个从站设备连接,若干个从站设备分为至少两组以太网设备,每组以太网设备的从站设备通过以太网连接。
9、作为本发明再进一步的方案:分布式安装包括但不限于线性安装、环形安装和树形安装。
10、一种同步采集系统的同步采集方法,该同步采集方法包括:
11、s1、在配置有以太网接口的设备上安装ethercat配套的twincat3上位机软件,形成主站设备;
12、s2、主站设备的上位机软件对同一ethercat网段的所有从站设备控制;
13、s3、从站设备以mcu作为主控,处理主站设备下发的指令和上传fpga处理后的数据;
14、s4、ethercat从站控制器的同步时钟接入fpga管脚,通过捕捉信号变化,实时下发ad采集指令。
15、作为本发明再进一步的方案:步骤s1中,主站设备在安装twincat3上位机软件之后,进行如下配置:
16、1)扫描从站设备;
17、2)设置从站设备同步模式;
18、3)设置从站设备同步周期;
19、4)设置传输数据结构;
20、5)完成上述配置后,进入命令控制界面。
21、作为本发明再进一步的方案:步骤s2中,对从站设备的控制包括:采集时间选择、停止采集、采样率选择、放大倍数选择、复位、待机、上传原始数据、上传处理后数据和停止上传数据。
22、作为本发明再进一步的方案:从站设备包括七路接口:一路电源接口、一路数据输入接口、一路数据输出接口和四路振动信号采集接口;其中,数据输入接口连接其他从站设备的输出接口或主站,数据输出接口连接其他从站设备的数据输入接口,振动信号采集接口连接iepe振动传感器。
23、作为本发明再进一步的方案:步骤s4中,ethercat从站控制器的同步时钟包括:
24、a)系统时间:系统时间为同步采集系统的系统计时,用于通信和时间标记;
25、b)参考时钟和从时钟:主站设备连接的第一个具有ethercat功能的从站设备的时钟作为参考时钟,其他从站设备的时钟为从时钟;其中,参考时钟被用于同步其他从站设备的从时钟与主站时钟,参考时钟提供系统时间;
26、c)主站时钟:主站设备提供的初始化时钟;
27、d)本地时钟:每个具有ethercat功能的从站设备本地独立运行的时钟为本地时钟,本地时钟与参考时钟的差值为时钟初始偏移量,参考时钟与各个具有ethercat功能的从站设备之间的时钟源不同,在运行过程中存在的偏移为时钟漂移量;
28、e)本地系统时间:每个具有ethercat功能的从站设备的本地时钟经过补偿和同步之后会产生一个本地系统时间,ethercat时钟同步机制使各个从站设备的本地系统时间保持一致,参考时钟与从站设备的本地系统时间保持一致;
29、f)传输延迟时间:命令数据帧在各个从站设备之间传输时由于设备内部和物理连接原因造成的延迟称为传输延迟时间;
30、h)动态时钟偏移:参考时钟与各个具有ethercat功能的从站设备之间的时钟源不同,在运行过程中存在的偏移为动态时钟偏移。
31、作为本发明再进一步的方案:步骤s4中,ethercat从站控制器的同步时钟的计算方法包括:
32、ⅰ)初始化时,主站设备发送命令数据帧,获取各个从站设备的时钟初始偏移量;
33、ⅱ)初始化时,主站设备读取从站设备保存的时间值,计算传输延迟时间;
34、ⅲ)初始化时,为了快速补偿时钟的初始偏差,主站设备在测量传输延迟时间和时钟初始偏移量之后,独立的命令数据帧中连续发送命令,使从站设备时间同步,完成分布式时钟初始化;
35、ⅳ)在周期性运行阶段,随着过程数据周期性地发送命令读取参考系统时间,写入到从站设备,实时补偿动态时钟偏移。
36、本发明的有益效果是:
37、1)本同步采集系统采用分布式安装方式,利用ethercat工业以太网,实现主站设备控制多个从站设备的同步采集与收发数据;
38、2)单个从站设备在不同采集通道中不存在采集偏差,不同从站设备之间同步采集偏差精确到纳秒级,相较于第一种方案,本技术方案有效减少了同步采集偏差;
39、3)本同步采集系统采用的ethercat工业以太网是在以太网的基础上加入了ethercat从站控制器,相较于第二种方案,本技术方案可以在网络封闭环境下使用;
40、4)本同步采集系统具有实时性高、接入点数多、拓扑灵活等特点,不仅提高系统的实时性,也增强系统的兼容与扩展能力,采用ethercat工业以太网作为主站设备与同步采集从站设备的通信总线,有效减少同步采集的时间偏差。
- 还没有人留言评论。精彩留言会获得点赞!