空域全覆盖性抗干扰ADS-B系统方法与流程
本发明涉及民航和通用航空空域监视方法,特别涉及空域全覆盖性抗干扰ads-b系统方法,属于空中交通管理领域。
背景技术:
1、ads-b系统作为现代空中交通管制的心脏,对航空安全提供着重要的保障;可以提供飞机的身份、位置、速度等状态信息,而且数据的更新率快;与空中交通防撞系统tcas系统相比较,使用成本低、精度误差小、监视能力强、便于安装,因此已经普遍作为通用航空中的防撞设备;ads-b系统由多地面站和机载站构成,以网状、多点对多点方式完成数据双向通信,使地面管制人员和机载人员都能对空域中的安装有ads-b系统的飞机进行监视;一般情况下机载ads-b系统只需机载电子设备(gps接收机、数据链收发机及其天线、驾驶舱冲突信息显示器cdti),不需要任何地面辅助设备即可完成相关功能;ads-b地面站可以接收较大范围内的ads-b系统信息、其它ads-b地面站系统信息、其它监视设备如雷达的监视信息融合生成tis-b消息;ads-b地面站系统能够将有关信息发送给空域中的飞机,使得空域中的飞机可以获得同地面站相同的监视信息;地面站易部署和维护,且成本低,因此可以实现大范围的部署,生成监视网络;基于对ads-b系统的性能分析,也可以将其应用于通航飞行中的冲突判定和防撞。
2、但是ads-b系统的监视目标仅为安装有ads-b机载系统的飞机,而且使用ads-b系统存在消息的漏检,漏报和虚假代码;对于现有ads-b系统,当出现两架及以上飞机发出的ads-b信号混叠时将视为错误代码剔除;同时,地面ads-b接收范围大,距离较近飞机发出的ads-b信号比远距离飞机发出的ads-b信号要强很多,现有ads-b系统在处理近距离飞机发出的ads-b信号时会将远距离飞机发出的ads-b信号当作噪声处理掉;由于这些原因,ads-b地面站系统并不能实现对空域的全覆盖,无法满足民航机场及航路或通航服务站对服务空域中的所有目标进行监视和防撞告警;因此亟待需要空域全覆盖性抗干扰ads-b系统以解决现有ads-b系统存在消息的漏检,漏报和虚假代码问题,实现服务空域的覆盖性监视。
技术实现思路
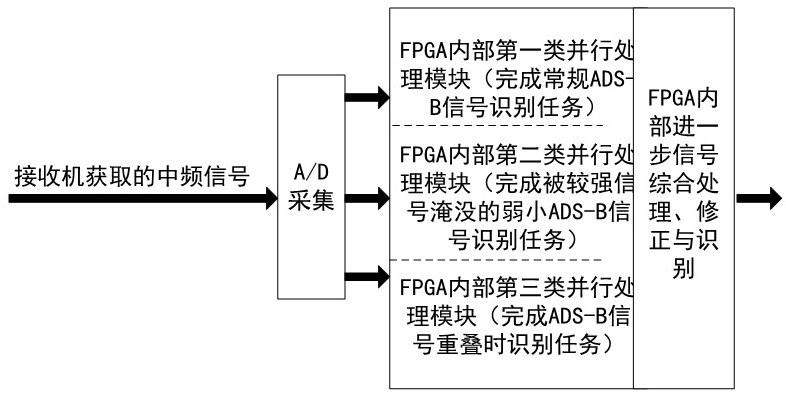
1、为了克服现有ads-b系统不能处理混叠信号和识别被淹没的远距飞机离弱小ads-b信号问题,本发明提供了一种空域全覆盖性抗干扰ads-b系统方法;该方法将ads-b系统中信号处理与识别部分分为三个子处理器,ads-b系统获得经过带通滤波的中频信号由a/d采集后分别输入给三个子处理器;第一类并行子处理器负责处理和识别正常ads-b信号,实现现有ads-b系统的功能;第二类并行子处理器负责处理和识别被近距离飞机较强ads-b信号淹没的远距离飞机弱小ads-b信号;第三类并行子处理器负责处理和识别多个混叠ads-b信号,对现有ads-b系统剔除的混叠信号进行识别;第一类并行子处理器通过设置幅值门限消除弱小信号干扰,并采用鲁棒统计脉冲个数的方法以提高ads-b信号识别的准确性;第二类并行子处理器同时获取a/d采集和第一类并行子处理器消除弱小信号干扰后的同步信号,基于这两种信号消除近距离飞机发出的较强ads-b信号,仅保留远距离飞机发出的弱小ads-b信号,该弱小信号经过数字放大后按照第一类并行子处理器的方法识别弱小ads-b信号;第三类并行子处理器负责处理和识别多个混叠ads-b信号,按照混叠信号处理方法对现有ads-b系统剔除的混叠信号进行识别;这三类并行子处理器可以覆盖处理从天线获得所有信号,解决了现有ads-b系统混叠信号和弱小信号被剔除的问题。
2、本发明解决其技术问题所采用的技术方案是:一种空域全覆盖性抗干扰ads-b系统方法,其特点包含以下步骤:
3、步骤一、将ads-b系统中信号处理与识别部分分为三类并行子处理器,ads-b系统获得经过带通滤波的中频信号由a/d采集后分别输入给三类并行子处理器;第一类并行子处理器负责处理和识别正常ads-b信号,实现现有ads-b系统的功能;第二类并行子处理器负责处理和识别被近距离飞机较强ads-b信号淹没的远距离飞机弱小ads-b信号;第三类并行子处理器负责处理和识别多个混叠ads-b信号,对现有ads-b系统剔除的混叠信号进行识别;
4、步骤二、第一类并行子处理器通过设置幅值门限消除弱小信号干扰,并采用鲁棒统计脉冲个数的方法以提高ads-b信号识别的准确性;
5、
6、式中,为设置幅值门限消除弱小信号干扰后的待识别信号,为a/d采集器当前的采集次数,为ads-b系统获得经过带通滤波的中频信号由a/d采集后的信号,为设置的消除弱小信号干扰幅值门限值;
7、步骤三、第二类并行子处理器同时获取a/d采集和第一个子处理器消除弱小信号干扰后的同步信号,基于这两种信号消除近距离飞机发出的较强ads-b信号,仅保留远距离飞机发出的弱小ads-b信号,
8、,
9、式中,为保留并放大的远距离飞机发出的弱小ads-b信号,为放大倍数,为设置的消除近距离飞机发出的较强ads-b信号的参数,为a/d采集器上一拍的采集次数;
10、该弱小信号经过数字放大后按照第一个子处理器的方法识别弱小ads-b信号;
11、步骤四、第三类并行子处理器负责处理和识别,具体流程为:对现有ads-b系统剔除的混叠信号进行识别
12、(1) 对于带通滤波的中频信号由a/d采集后的多个混叠ads-b信号,按照统计方式通过信号幅值等级确定混叠ads-b信号数目;
13、(2) 对不同幅值等级的信号进行分类:
14、截取最低幅值信号并按照
15、
16、式中,为筛选后的最低幅值信号,为第a/d采集器当前的采集次数,为初始截取的最低幅值信号,为设置消除最低幅值信号包含的的弱小信号干扰幅值门限值,为ads-b信号周期,为正数,为检测到的跳变周期;
17、然后在混合信号中消除最低幅值信号;
18、,
19、式中,为在混合信号中消除最低幅值信号后保留信号,为放大倍数,为设置的消除最低幅值信号的参数;
20、然后再按照同样方法截取次低幅值信号并消除次低幅值信号,直至仅保留最高信号;
21、(3) 获取的最高幅值信号中的窄脉冲幅值和剔除信号中作为多个不同幅值信号的可能叠加值,按照检查是否满足最低幅值信号、次低幅值信号、…、次最高幅值信号是否满足跳变周期进行相应的并行信号补充、修正与整合;
22、(4) 不同幅值等级信号进行并行修正与整合后,按照步骤一的方式进行识别。
23、本发明的有益结果是:提供了一种空域全覆盖性抗干扰ads-b系统方法,该方法将ads-b系统中信号处理与识别部分分为三类并行子处理器,ads-b系统获得经过带通滤波的中频信号由a /d采集后分别输入给三类并行子处理器;第一类并行子处理器可以给出正常ads-b信号的处理和识别结果,实现现有ads-b系统的功能;第二类并行子处理器可以处理和识别被近距离飞机较强ads-b信号淹没的远距离飞机弱小ads-b信号;第三类并行子处理器可以给出处理和识别多个混叠ads-b信号,对现有ads-b系统剔除的混叠信号进行识别;这三类并行子处理器可以覆盖处理从天线获得所有信号,解决了现有ads-b系统混叠信号和弱小信号被剔除的问题。
24、下面结合附图和具体实施方式对本发明具体内容作详细说明。
- 还没有人留言评论。精彩留言会获得点赞!