一种基于水下潜器的可视化生物拖网系统的制作方法
本发明属于海洋工程,具体而言,涉及一种基于水下潜器的可视化生物拖网系统。
背景技术:
1、对于海底生物的研究,最常用的方法还是从海底取回样本到科学考察船上进行研究。传统的取样方法主要是利用海底拖网、取样器或者抓斗获取生物样本,近年来随着深海潜水器的出现,国外普遍采用一体化的探测、过滤与取样技术,利用深海作业的机械手通过虹吸式取样器捕获生物样品。但是,这种一体化的探测、过滤与取样技术只能在采样前设定好采样的深度,预设采样条件进行工作,也就是说,不能实时在线进行监控,不能实时观察采样的具体情景,也不能对海下复杂的环境进行应变。
2、现有的采样系统是基于海底拖曳的生物采样系统,很难在海底生物样品取样方面得到良好应用,很难获得完整的海底生物样品群落,没有精确控制取样水深,很难区分各类不同海底生物样品生活的实际水深。而捕获到的海底生物样品的成活率、群落的完整性与层次性难以保证,而这些对海底生物样品取样系统来说至关重要。并且现有拖网在作业时,操作人员无法观测到生物数量和拖网的状态,如果拖网出现破损,只有拖网回收后才能发现,不便于使用。
技术实现思路
1、有鉴于此,本发明提供一种基于水下潜器的可视化生物拖网系统,能够解决现有的采样系统的拖网在作业时无法直接观测到生物数量和拖网的状态,难以判断拖网的完整性,不便于使用的问题。
2、本发明是这样实现的:
3、本发明提供一种基于水下潜器的可视化生物拖网系统,具有固定框架,其中,还包括兜网、过滤机构、鱼群观测相机以及中央控制系统,所述兜网设置在所述固定框架的后部,用于收集海洋生物;所述固定框架的内部设置有过滤机构,所述过滤机构用于对进入所述兜网内部的海洋生物进行筛选;所述固定框架的顶部设置有所述鱼群观测相机,所述鱼群观测相机用于对海洋生物进行观测;所述中央控制系统与所述鱼群观测相机电连接,用于控制所述鱼群观测相机对海洋生物进行监测。
4、本发明提供的一种基于水下潜器的可视化生物拖网系统的技术效果如下:通过设置鱼群观测相机,对生物进行观测,便于捕获。
5、在上述技术方案的基础上,本发明的一种基于水下潜器的可视化生物拖网系统还可以做如下改进:
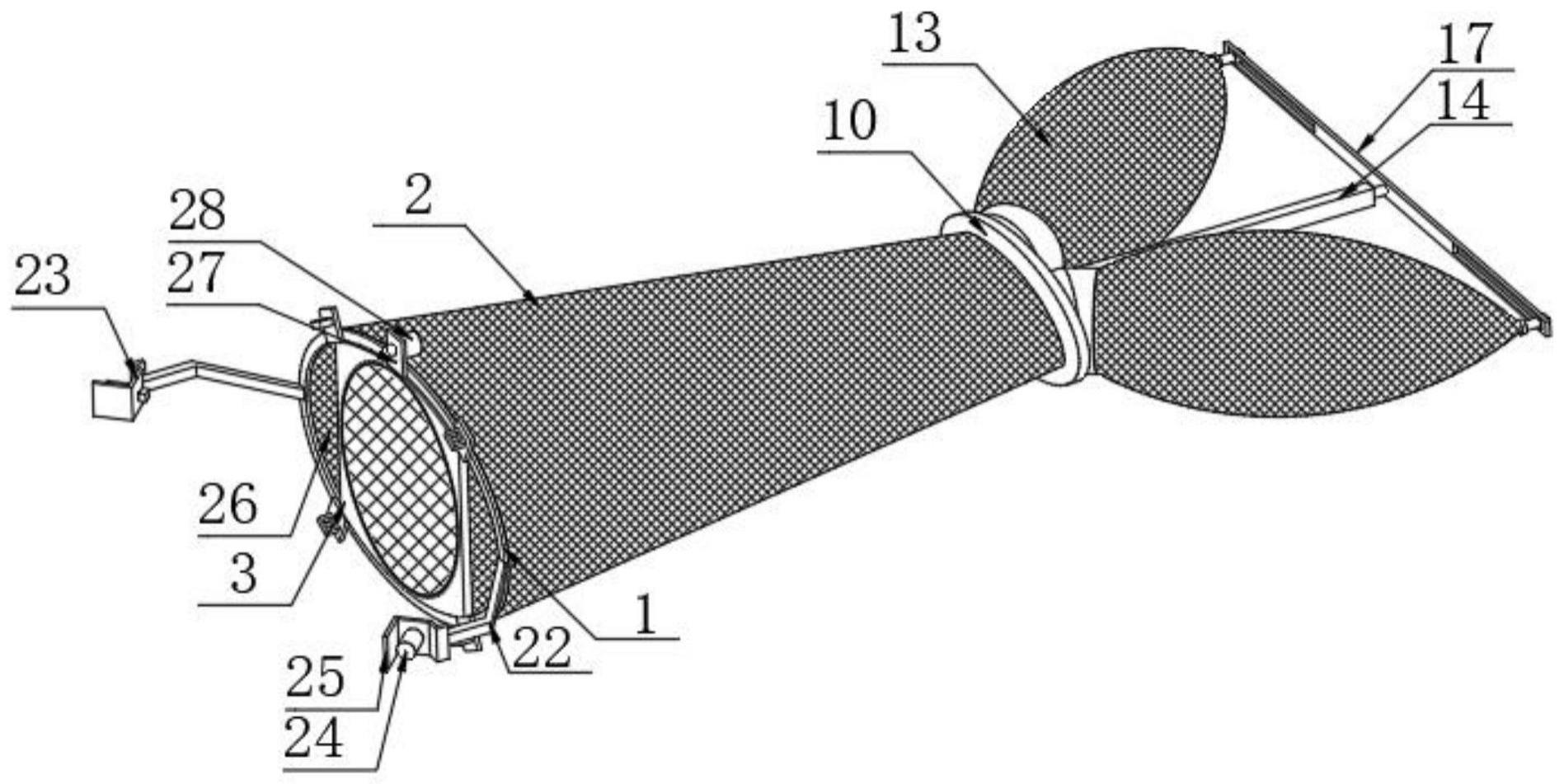
6、其中,所述兜网包括外层主兜网,所述外层主兜网固定连接在所述固定框架的后侧,所述固定框架的内部固定有固定板,所述固定板的后侧固定有进料网,所述进料网设置在所述外层主兜网的内部;所述外层主兜网内部前中段固定连接有支撑环架,所述支撑环架的内部转动连接有转动支架,所述转动支架的一侧固定有多个叶片,所述叶片呈环形阵列分布,多个所述叶片设置在所述进料网的外侧,所述进料网与所述转动支架转动连接;所述转动支架的后侧固定连接有旋转兜网,所述外层主兜网的后端固定连接有连接板,所述旋转兜网与所述连接板转动连接,所述连接板的后侧两端均固定连接有连接管,两个所述连接管的后侧均固定连接有副兜网。
7、进一步的,所述过滤机构包括滤网,所述滤网通过所述固定板固定在所述固定框架上,所述固定板的两侧均固定有所述滤网,两个所述滤网与所述固定框架固定连接。
8、进一步的,所述连接板的前侧固定有多个支杆,多个所述支杆均与所述支撑环架固定连接;多个所述支杆与所述外层主兜网的内部相贴合,所述旋转兜网的网眼尺寸大于所述进料网的网眼尺寸,所述进料网的网眼尺寸大于所述外层主兜网和所述副兜网的网眼尺寸。
9、采用上述改进方案的有益效果为:通过设置支杆,对支撑环架和外层主兜网进行支撑,提高外层主兜网的稳定性和强度;通过设置所述旋转兜网的网眼尺寸大于进料网的网眼尺寸,所述进料网的网眼尺寸大于外层主兜网和副兜网的网眼尺寸,进料网对中等尺寸的海洋生物进行收集捕捞,旋转兜网对较大尺寸的海洋生物进行捕捞,并且使体型稍小的生物从旋转兜网内部落至旋转兜网外侧,并向进入两个副兜网内部收集。
10、进一步的,所述连接板的后侧固定有滑套,所述滑套的内部滑动连接有活塞,所述活塞的内部开设有多个通槽,所述活塞的一侧固定连接有滑杆,所述滑杆贯穿所述滑套的侧壁并与所述滑套滑动连接;所述滑杆的后端与支撑杆固定连接,所述支撑杆的两端内部均开设滑槽,两个所述滑槽的内部均滑动连接有滑块,两个所述滑块的前侧均固定连接有连接头,两个所述连接头分别与两个所述副兜网固定连接。
11、采用上述改进方案的有益效果为:通过设置所述滑杆贯穿滑套侧壁并与滑套滑动连接,在滑套内部填充缓冲液,使活塞在滑套内部滑动时形成阻尼效果,对滑杆进行缓冲;通过设置两个所述滑块前侧均固定连接有连接头,两个所述连接头分别与两个副兜网固定连接,使两个副兜网在水中移动时,由于内部生物和副兜网本体的阻力,使两个副兜网末端向中部移动,并且带动两个连接头和滑块移动,推动支撑杆后移,并使滑杆对支撑杆进行缓冲,并且对两个副兜网进行支撑,提高副兜网在拖动时的稳定性。
12、进一步的,所述固定框架的外侧固定连接有多个挂扣,所述固定框架的两侧均固定连接有支臂,两个所述支臂的前端均固定连接有支板,两个所述支板的一侧均固定连接后网兜观测相机,两个所述支板的一侧均固定有挡板,所述固定框架的顶部固定连接有竖板,所述鱼群观测相机固定连接在所述竖板的一侧。
13、采用上述改进方案的有益效果为:通过设置网兜观测相机,对进料口的情况进行实时观测;通过设置两个所述支板一侧均固定连接有挡板,对网兜观测相机进行防护。
14、进一步的,所述中央控制系统的输出端连接有环境观测模块,所述环境观测模块的输出端连接有rov控制模块和对接模块,所述rov控制模块的输入端与所述中央控制系统连接,所述对接模块的输入端与所述中央控制系统连接,所述中央控制系统的输出端连接有时间定位模块,所述时间定位模块的输出端连接有鱼群监测模块,所述中央控制系统的输出端连接有拖网视觉监测模块,所述中央控制系统的输出端还连接有图形处理模块,所述鱼群监测模块和所述拖网视觉监测模块的输出端均与所述图形处理模块连接,所述中央控制系统的输入端连接有用户端。
15、进一步的,所述环境观测模块包括北斗定位单元、压力传感器、角速度传感器、温盐深传感器以及定位矫正单元,
16、所述北斗定位单元用于对该可视化生物拖网系统所处位置进行定位;
17、所述压力传感器用于对该可视化生物拖网系统当前所处的深度压力进行检测;
18、所述角速度传感器用于对该可视化生物拖网系统的角速度进行检测;
19、所述温盐深传感器用于对海水温盐深进行检测;
20、所述定位矫正单元用于对该可视化生物拖网系统当前位置进行再次定位,通过矫正提高定位的精确度;
21、所述rov控制模块包括控制器、rov驱动单元以及rov视觉单元,
22、所述控制器用于对rov进行控制;
23、所述rov驱动单元用于对rov进行驱动;
24、所述rov视觉单元用于控制rov进行视觉定位;
25、所述对接模块包括视觉相机定位单元、甲板辅助对接单元、rov回收单元以及rov布放单元;
26、所述视觉相机定位单元用于使视觉相机进行观测定位,便于rov进行对接;
27、所述甲板辅助对接单元用于控制甲板设备辅助rov进行对接;
28、所述rov回收单元用于rov进行回收;
29、所述rov布放单元用于控制rov进行布放。
30、进一步的,所述时间定位模块包括建立显示区域域点、获取图形分量数据、计算区域变量以及调整观测角度,所述建立显示区域域点的输出端与所述获取图形分量数据连接,所述获取图形分量数据的输出端与所述计算区域变量连接,所述计算区域变量的输出端与所述调整观测角度连接;
31、所述鱼群监测模块包括声呐监测单元、坐标系建立单元、鱼群移动计算单元以及计算预测补偿单元,所述声呐监测单元的输出端与所述坐标系建立单元连接,所述坐标系建立单元的输出端与所述鱼群移动计算单元连接,所述鱼群移动计算单元的输出端与所述计算预测补偿单元连接。
32、采用上述改进方案的有益效果为:通过设置建立显示区域域点、获取图形分量数据、计算区域变量以及调整观测角度,使建立显示区域域点建立鱼群区域域点,并且对获取图形分量数据发出指令,使获取图形分量数据得出图形分量数据,并对计算区域变量发出指令,使计算区域变量对变量进行计算,并对调整观测角度发出指令,使调整观测角度对视觉相机调节角度改变贯穿范围。通过设置声呐监测单元、坐标系建立单元、鱼群移动计算单元以及计算预测补偿单元,使声呐监测单元对鱼群进行检测,并使坐标系建立单元对鱼群位置建立坐标系,对鱼群移动计算单元发出指令,使鱼群移动计算单元对鱼群的移动变量进行计算,并使计算预测补偿单元对计算结果进行预测补偿。
33、进一步的,所述拖网视觉监测模块包括图形获取单元、拖网破损检测单元、主网容量检测单元、第一副网容量检测单元以及第二副网容量检测单元,所述图形获取单元的输出端与所述拖网破损检测单元连接,所述拖网破损检测单元的输出端与所述主网容量检测单元连接,所述主网容量检测单元的输出端分别与所述第一副网容量检测单元以及所述第二副网容量检测单元连接;
34、所述图形处理模块包括图形提取单元、观测参数记录单元、观测参数上传单元、贯穿参数储存单元以及数据读取单元,所述图形提取单元的输出端与所述观测参数记录单元连接,所述观测参数记录单元的输出端与所述观测参数上传单元连接,所述观测参数上传单元的输出端与所述贯穿参数储存单元连接,所述贯穿参数储存单元的输出端与所述数据读取单元连接。
35、采用上述改进方案的有益效果为:通过设置图形获取单元、拖网破损检测单元、主网容量检测单元、第一副网容量检测单元以及第二副网容量检测单元,图形获取单元对图像进行获取,并使拖网破损检测单元对图像中拖网情况进行检测,主网容量检测单元对主网内部容量进行检测,第一副网容量检测单元和第二副网容量检测单元分别对两个副网容量进行检测。通过设置图形提取单元、观测参数记录单元、观测参数上传单元、贯穿参数储存单元以及数据读取单元,使图形提取单元对图像进行提取,使图形提取单元对观测参数记录单元发出指令,使观测参数记录单元对观测参数进行记录,使观测参数上传单元对参数进行上传,接着使贯穿参数储存单元对参数进行储存,通过数据读取单元对观测参数进行读取。
36、与现有技术相比较,本发明提供的一种基于水下潜器的可视化生物拖网系统的有益效果是:通过设置该基于水下潜器的可视化生物拖网系统,鱼群等海洋生物从进料网内部进入,并且沿着转动支架进入旋转兜网内部,当生物进入旋转兜网内部后,由于旋转兜网的网眼设置较大,使体型较小的生物从旋转兜网的网眼中移出,并落入外层主兜网内部,并且由于装置整体向前移动,使位于外层主兜网内部的生物向两个副兜网内部移动,并且在两个副兜网内部收集,并且当外层主兜网在进行移动时,使海水从滤网向外层主兜网内部灌输,使海水对多个叶片进行冲击,使多个叶片带动转动支架进行转动,并使转动支架带动旋转兜网进行转动,使旋转兜网内部的小型生物在惯性的作用下向外甩出,方便对大小尺寸的生物进行分离,同时当旋转兜网在进行旋转时可以对较大海洋生物进行刺激,保持生物活性,减少死亡率;当小型生物落在两个副兜网内部时,使生物在副兜网内部拖行,由于阻力向后拖动,并使两个副兜网后端向中部靠拢,滑套内部填充缓冲液,使活塞在滑套内部滑动时形成阻尼效果,对滑杆进行缓冲,并且带动两个连接头和滑块移动,推动支撑杆后移,并使滑杆对支撑杆进行缓冲,并且对两个副兜网进行支撑,提高副兜网在拖动时的稳定性,减少机械损伤,提高存活率;使环境观测模块对所处位置进行定位,并使环境观测模块对rov控制模块发出指令,控制rov进行移动,并使环境观测模块对对接模块发出指令,使对接模块控制rov与拖船进行对接,使中央控制系统对时间定位模块发出指令,使时间定位模块进行视觉定位,便于进行观测,使时间定位模块对鱼群监测模块发出指令,使鱼群监测模块对鱼群进行监测,并且对图形处理模块发出指令,使图形处理模块对鱼群摄像图片进行处理,并且中央控制系统对拖网视觉监测模块发出指令,使拖网视觉监测模块对拖网进行监测,并且使图形处理模块对拖网监测图像进行处理,方便对拖网和鱼群保持监控,提高拖网使用的安全性,并且实时监控拖网剩余容量大小,便于捕捞。
- 还没有人留言评论。精彩留言会获得点赞!