宽带通信感知一体化系统基站、三维波束赋形方法和装置
本发明涉及无线通信,尤其涉及一种宽带通信感知一体化系统基站、三维波束赋形方法和装置。
背景技术:
1、第六代移动通信(6g)拟启用毫米波或太赫兹频段结合大规模多输入多输出(multiple input and multiple output,mimo)技术构建通信感知一体化(integratedsensing and communication,isac)系统,该系统能够借助毫米波或太赫兹频段信号频率高、带宽大的特点以及大规模mimo系统角度分辨率高的特点,同时实现基于通信信号的超高速率通信和超高精度感知,即宽带通信感知一体化系统将在6g通信中占据主导地位。
2、isac系统中的mimo阵列通常需要使用先进的波束赋形技术生成定向波束进而完成通信和感知任务。随着进入第五代移动通信(5g)后,天线阵列逐渐从一维形态拓展到二维形态,波束赋形技术也逐渐从二维波束赋形升级为三维波束赋形。三维波束赋形能够同时控制天线方向图在水平方向和垂直方向上的形状,从而能够更精准地将波束指向所需要服务的通信用户或所需要感知的动态目标。
3、现有技术中mimo阵列主要以传统的移相器为主流硬件实现波束赋形,该方案在窄带系统中具有良好的波束赋形效果。然而,由于移相器本质上属于窄带器件,其生成波束的角度指向无法随频率的变化而变化。此时基于正交频分复用(orthogonal frequencydivision multiplexing,ofdm)波形调制的宽带isac系统如果采用移相器进行波束赋形,则会发生波束偏移现象,即来自不同频率的子载波的波束赋形会指向不同的空间角度方向,使部分子载波的波束能量偏离所期望的空间角度方向,造成能量泄露。波束偏移现象将对宽带isac系统中的三维波束赋形技术产生较为严重的影响,其不仅会恶化定向通信性能,而且会干扰定向精准感知。目前,尚未有技术能在宽带通信感知一体化系统三维波束赋形过程中避免出现波束偏移。
技术实现思路
1、为了解决现有技术中宽带通信感知一体化系统三维波束赋形受到波束偏移现象客观影响的问题,本发明提供一种宽带通信感知一体化系统基站、三维波束赋形方法和装置,在现有基于mimo-ofdm技术的宽带isac基站中设置真时延线单元,基于波束偏移需求的初始空间角度方向和终止空间角度方向设置移相器的相移量和真时延线单元的时延值,以使基站发射的所有子载波波束逐渐从初始空间角度方向偏移至终止空间角度方向,实现灵活可控的三维波束赋形。当设置初始空间角度方向、终止空间角度方向、通信用户所在空间角度方向三者相同时,基站能够克服波束偏移现象实现稳定的定向通信传输;当设置初始空间角度方向和终止空间角度方向分别与基站所需感知范围的边界重合时,基站能够反向利用波束偏移现象实现大范围的快速感知。
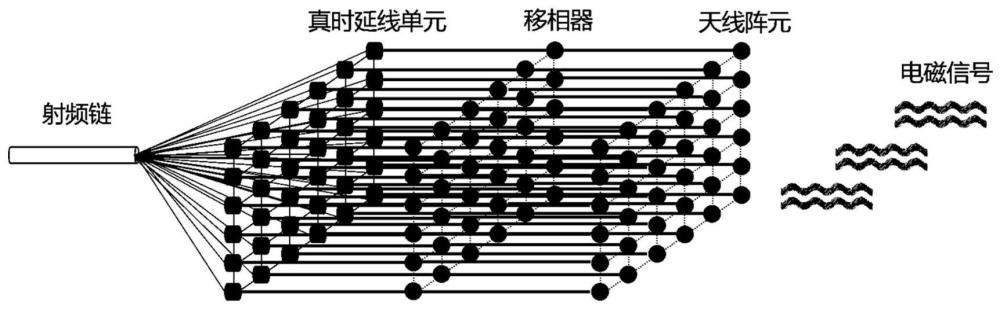
2、第一方面,本发明提供一种宽带通信感知一体化系统基站,所述基站为mimo-ofdm基站,包括:均匀平面阵、n个移相器、n个真时延线单元以及射频链;
3、所述均匀平面阵包括半载波波长间距的n个天线阵元;
4、所述n个天线阵元、所述n个移相器和所述n个真时延线单元均按照n=nx×nz的方式排布;
5、所述射频链的输出端与所述n个真时延线单元的输入端相连接,第(nx,nz)个真时延线单元的输出端通过第(nx,nz)个移相器与第(nx,nz)个天线阵元的输入端相连接,所述n个天线阵元的输出端能够将电磁信号发射至自由空间;
6、其中,nx=0,1,...,nx-1,nz=0,1,...,nz-1,nx为所述均匀平面阵中天线阵元的行数,nz为所述均匀平面阵中天线阵元的列数。
7、第二方面,本发明提供一种宽带通信感知一体化系统的三维波束赋形方法,所述方法适用于基站定向通信场景,所述方法包括:
8、获取通信用户在物理角度方向的水平角和俯仰角;
9、根据所述水平角和所述俯仰角,确定所述通信用户所在空间角度方向;
10、设置初始空间角度方向与终止空间角度方向与所述空间角度方向相同;
11、基于所述初始空间角度方向设置基站中n个移相器的相移量,并基于所述终止空间角度方向设置基站中n个真时延线单元的时延值,以使基站发射的所有子载波波束逐渐从所述初始空间角度方向偏移至所述终止空间角度方向,此时所有子载波的波束均将聚集在通信用户所在的空间角度上,实现定向通信。
12、根据本发明提供的宽带通信感知一体化系统的三维波束赋形方法,所述基于所述初始空间角度方向设置基站中n个移相器的相移量,包括:
13、根据所述初始空间角度方向以及第一预设公式,确定基站中n个移相器的相移量;
14、其中,所述第一预设公式为:
15、
16、上式中,是第(nx,nz)个移相器的相移量,d是均匀平面阵中天线阵元的间距,f0是第0号子载波的频率,c是光速,(ψstart,ωstart))是初始空间角度方向,nx=0,1,...,nx-1,nz=0,1,...,nz-1,nx为均匀平面阵中天线阵元的行数,nz为均匀平面阵中天线阵元的列数。
17、根据本发明提供的宽带通信感知一体化系统的三维波束赋形方法,所述基于所述终止空间角度方向设置基站中n个真时延线单元的时延值,包括:
18、根据所述终止空间角度方向以及第二预设公式,确定基站中n个真时延线单元的时延值;
19、其中,所述第二预设公式为:
20、
21、上式中,是第(nx,nz)个真时延线单元的时延值,d是均匀平面阵中天线阵元的间距,f0是第0号子载波的频率,w是系统传输带宽,c是光速,是第(nx,nz)个移相器的相移量,(ψend,ωend)是终止空间角度方向,nx=0,1,...,nx-1,nz=0,1,...,nz-1,nx为均匀平面阵中天线阵元的行数,nz为均匀平面阵中天线阵元的列数。
22、第二方面,本发明提供一种宽带通信感知一体化系统的三维波束赋形方法,所述方法适用于基站大范围感知场景,所述方法包括:
23、获取待感知区域的物理角度方向感知范围;其中,所述物理角度方向感知范围用来表示,θ,θmin和θmax分别为物理角度方向的水平角、水平角下限和水平角上限,和分别为物理角度方向的俯仰角、俯仰角下限和俯仰角上限;
24、根据所述物理角度方向感知范围,确定所述待感知区域的空间角度方向感知范围;其中,所述空间角度方向感知范围空间角度域感知范围用{(ψ,ω)|ψmin≤ψ≤ψmax,ωmin≤ω≤ωmax}来表示;
25、将所述空间角度方向感知范围有序地划分为有限多个互异的子范围;其中,第k个子范围用{(ψk,ω)|ωmin≤ω≤ωmax},k∈{1,2…θ}来表示或者用{(ψ,ωk)|ψmin≤ψ≤ψmax},k∈{1,2…γ}来表示,θ是按照第一预设步长从[ψmin,ψmax]中采样的角度个数,γ是按照第二预设步长从[ωmin,ωmax]中采样的角度个数;
26、对于每一个所述子范围,设置初始空间角度方向与所述子范围对应的第一边界子点重合,设置终止空间角度方向与所述子范围对应的第二边界子点重合,基于所述初始空间角度方向设置基站中n个移相器的相移量,基于所述终止空间角度方向设置基站中n个真时延线单元的时延值,以使基站发射的所有子载波波束逐渐从所述初始空间角度方向偏移至所述终止空间角度方向,从而完成所述子范围的感知;其中,{(ψk,ω)|ωmin≤ω≤ωmax}对应的第一边界子点和第二边界子点分别为(ψk,ωmin)和(ψk,ωmax);{(ψ,ωk)|ψmin≤ψ≤ψmax}对应的第一边界子点和第二边界子点分别为(ψmin,ωk)和(ψmax,ωk);
27、遍历所有子范围,以完成对所述待感知区域的感知。
28、根据本发明提供的宽带通信感知一体化系统的三维波束赋形方法,所述基于所述初始空间角度方向设置基站中n个移相器的相移量,包括:
29、根据所述初始空间角度方向以及第一预设公式,确定基站中n个移相器的相移量;
30、所述基于所述终止空间角度方向设置基站中n个真时延线单元的时延值,包括:
31、根据所述终止空间角度方向以及第二预设公式,确定基站中n个真时延线单元的时延值;
32、其中,所述第一预设公式为:
33、
34、所述第二预设公式为:
35、
36、上式中,是第(nx,nz)个真时延线单元的时延值,是第(nx,nz)个移相器的相移量,d是均匀平面阵中天线阵元的间距,f0是第0号子载波的频率,w是系统传输带宽,c是光速,(ψstart,ωstart))是初始空间角度方向,(ψend,ωend)是终止空间角度方向,nx=0,1,...,nx-1,nz=0,1,...,nz-1,nx为均匀平面阵中天线阵元的行数,nz为均匀平面阵中天线阵元的列数。
37、第四方面,本发明提供一种宽带通信感知一体化系统的三维波束赋形装置,所述装置适用于基站定向通信场景,所述装置包括:
38、第一获取模块,用于获取通信用户在物理角度方向的水平角和俯仰角;
39、第一确定模块,用于根据所述水平角和所述俯仰角,确定所述通信用户所在空间角度方向;
40、第一设置模块,用于设置初始空间角度方向与终止空间角度方向与所述空间角度方向相同;
41、第二设置模块,用于基于所述初始空间角度方向设置基站中n个移相器的相移量,并基于所述终止空间角度方向设置基站中n个真时延线单元的时延值,以使基站发射的所有子载波波束逐渐从所述初始空间角度方向偏移至所述终止空间角度方向,此时所有子载波的波束均将聚集在通信用户所在的空间角度上,实现定向通信。
42、第五方面,本发明提供一种宽带通信感知一体化系统的三维波束赋形装置,所述装置适用于基站大范围感知场景,所述装置包括:
43、第二获取模块,用于获取待感知区域的物理角度方向感知范围;其中,所述物理角度方向感知范围用来表示,θ,θmin和θmax分别为物理角度方向的水平角、水平角下限和水平角上限,和分别为物理角度方向的俯仰角、俯仰角下限和俯仰角上限;
44、第二确定模块,用于根据所述物理角度方向感知范围,确定所述待感知区域的空间角度方向感知范围;其中,所述空间角度方向感知范围空间角度域感知范围用{(ψ,ω)|ψmin≤ψ≤ψmax,ωmin≤ω≤ωmax}来表示;
45、划分模块,用于将所述空间角度方向感知范围有序地划分为有限多个互异的子范围;其中,第k个子范围用{(ψk,ω)|ωmin≤ω≤ωmax},k∈{1,2…θ}来表示或者用{(ψ,ωk)|ψmin≤ψ≤ψmax},k∈{1,2…γ}来表示,θ是按照第一预设步长从[ψmin,ψmax]中采样的角度个数,γ是按照第二预设步长从[ωmin,ωmax]中采样的角度个数;
46、第三设置模块,用于对于每一个所述子范围,设置初始空间角度方向与所述子范围对应的第一边界子点重合,设置终止空间角度方向与所述子范围对应的第二边界子点重合,基于所述初始空间角度方向设置基站中n个移相器的相移量,基于所述终止空间角度方向设置基站中n个真时延线单元的时延值,以使基站发射的所有子载波波束逐渐从所述初始空间角度方向偏移至所述终止空间角度方向,从而完成所述子范围的感知;其中,{(ψk,ω)|ωmin≤ω≤ωmax}对应的第一边界子点和第二边界子点分别为(ψk,ωmin)和(ψk,ωmax);{(ψ,ωk)|ψmin≤ψ≤ψmax}对应的第一边界子点和第二边界子点分别为(ψmin,ωk)和(ψmax,ωk);
47、遍历模块,用于遍历所有子范围,以完成对所述待感知区域的感知。
48、第六方面,本发明提供一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序时实现如第二方面所述宽带通信感知一体化系统的三维波束赋形方法或者实现如第三方面所述宽带通信感知一体化系统的三维波束赋形方法。
49、第七方面,本发明提供一种非暂态计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如第二方面所述宽带通信感知一体化系统的三维波束赋形方法或者实现如第三方面所述宽带通信感知一体化系统的三维波束赋形方法。
50、本发明提供的宽带通信感知一体化系统基站,所述基站为mimo-ofdm基站,包括:均匀平面阵、n个移相器、n个真时延线单元以及射频链;所述均匀平面阵包括半载波波长间距的n个天线阵元;所述n个天线阵元、所述n个移相器和所述n个真时延线单元均按照n=nx×nz的方式排布;所述射频链的输出端与所述n个真时延线单元的输入端相连接,第(nx,nz)个真时延线单元的输出端通过第(nx,nz)个移相器与第(nx,nz)个天线阵元的输入端相连接,所述n个天线阵元的输出端能够将电磁信号发射至自由空间;其中,nx=0,1,...,nx-1,nz=0,1,...,nz-1,nx为所述均匀平面阵中天线阵元的行数,nz为所述均匀平面阵中天线阵元的列数。本发明在现有基于mimo-ofdm技术的宽带isac基站中设置真时延线单元,通过合理设置移相器的相移量和真时延线单元的时延值,即可使基站发射的所有子载波波束从预设初始空间角度方向偏移至预设终止空间角度方向,实现波束偏移范围的灵活可控。
51、本发明提供的宽带通信感知一体化系统的三维波束赋形方法,该方法适用于基站定向通信场景,具体包括:获取通信用户在物理角度方向的水平角和俯仰角;根据所述水平角和所述俯仰角,确定所述通信用户所在空间角度方向;设置初始空间角度方向与终止空间角度方向与所述空间角度方向相同;基于所述初始空间角度方向设置基站中n个移相器的相移量,并基于所述终止空间角度方向设置基站中n个真时延线单元的时延值,以使基站发射的所有子载波波束逐渐从所述初始空间角度方向偏移至所述终止空间角度方向,此时所有子载波的波束均将聚集在通信用户所在的空间角度上,实现定向通信。本发明通过设置n个移相器的相移量使得波束偏移的初始空间角度方向与通信用户所在空间角度方向相同,通过设置n个真时延线单元的时延值使得波束偏移的终止空间角度方向与通信用户所在空间角度方向相同,以使所有子载波的波束空间角度指向均将与通信用户所在空间角度方向,从而缓解波束偏移现象,保障三维定向通信传输。
52、本发明提供的宽带通信感知一体化系统的三维波束赋形方法,该方法适用于基站大范围感知场景,具体包括:获取待感知区域的物理角度方向感知范围;其中,所述物理角度方向感知范围用来表示,θ,θmin和θmax分别为物理角度方向的水平角、水平角下限和水平角上限,和分别为物理角度方向的俯仰角、俯仰角下限和俯仰角上限;根据所述物理角度方向感知范围,确定所述待感知区域的空间角度方向感知范围;其中,所述空间角度方向感知范围空间角度域感知范围用{(ψ,ω)|ψmin≤ψ≤ψmax,ωmin≤ω≤ωmax}来表示;将所述空间角度方向感知范围有序地划分为有限多个互异的子范围;其中,第k个子范围用{(ψk,ω)|ωmin≤ω≤ωmax},k∈{1,2…θ}来表示或者用{(ψ,ωk)|ψmin≤ψ≤ψmax},k∈{1,2…γ}来表示,θ是按照第一预设步长从[ψmin,ψmax]中采样的角度个数,γ是按照第二预设步长从[ωmin,ωmax]中采样的角度个数;对于每一个所述子范围,设置初始空间角度方向与所述子范围对应的第一边界子点重合,设置终止空间角度方向与所述子范围对应的第二边界子点重合,基于所述初始空间角度方向设置基站中n个移相器的相移量,基于所述终止空间角度方向设置基站中n个真时延线单元的时延值,以使基站发射的所有子载波波束逐渐从所述初始空间角度方向偏移至所述终止空间角度方向,从而完成所述子范围的感知;其中,{(ψk,ω)|ωmin≤ω≤ωmax}对应的第一边界子点和第二边界子点分别为(ψk,ωmin)和(ψk,ωmax);{(ψ,ωk)|ψmin≤ψ≤ψmax}对应的第一边界子点和第二边界子点分别为(ψmin,ωk)和(ψmax,ωk);遍历所有子范围,以完成对所述待感知区域的感知。本发明将基站所需感知范围客观有序地划分为有限多个互异的小范围,然后反向利用波束偏移现象(通过设置n个移相器的相移量使得波束偏移的初始空间角度方向与基站所需要的感知子范围的初始感知边界重合,通过设置n个真时延线单元的时延值使得波束偏移的终止空间角度方向与基站所需要的感知子范围的终止感知边界重合,以使所有子载波的波束空间角度指向逐渐从初始感知边界偏移至终止感知边界)实现小范围的感知;最后遍历所有小范围实现对基站所需感知范围的快速感知。
- 还没有人留言评论。精彩留言会获得点赞!