一种基于混合指纹和视距/非视距识别的定位方法
本发明涉及无线通信及定位领域,尤其是涉及一种基于混合指纹和视距/非视距识别的定位方法。
背景技术:
1、复杂环境定位系统是物联网(internet of things,iot)的重要组成部分之一。在基于无线电波传播技术的背景下,目前已经开发了许多定位算法,如文献1“c.yang andh.-r.shao,“wifi-based indoor positioning,”ieee commun.mag.,vol.53,no.3,pp.150-157,2015.”提出了一种基于wifi的定位技术,其利用无线电波的到达时间(timeof arrival,toa)和到达角(angle of arrival,aoa)来对目标物体进行定位。然而此方法在被多径传输干扰、或在nlos的情况下,定位误差较大,变得不可靠。近年来,提出了许多相应的解决方案,其中基于机器学习技术的定位系统由于具有较高的成本效益和灵活的定位服务而受到业界的广泛关注。
2、如文献2“x.wang,l.gao,s.mao and s.pandey,″csi-based fingerprinting forindoor localization:a deep learning approach,″in ieee trans.veh.technol.,vol.66,no.1,pp.763-776,2017”提出利用机器学习的方式,基于信道状态信息(channelstate information,csi)指纹数据库的定位系统。然而上述定位方法仅利用单一的信道特征参数来训练定位模型,这使得模型估计精度较低,定位的性能较差。除此之外,如文献3“s.venkatraman,j.caffery,jr.,and h.r.you,“location using los range estimationin nlos environments,”in proc.ieee semiannual veh.technol.conf.,vol.2,birmingham,al,may 2002,pp.856-860.”所述,当环境非常复杂时,电磁波信号的传播经常收到阻挡,这会严重影响定位的精度。因此,辨别nlos的传播场景并减轻其对定位系统影响的至关重要。文献4“y.shen and m.z.win,“localization accuracy using widebandantenna arrays,”in ieee trans.commun.,vol.58,no.1,pp.270-280,jan.2010”提出了一种基于机器学习技术的分类和回归算法,该算法评估信号是在los还是nlos条件下传输的,并且可以减轻由于nlos引起的测距误差,可以显著提高现实环境中的定位性能。然而,上述的定位方法没有使用融合了多种精细化信道特征参数来构建指纹数据库,因此定位精度较低,并且在los和nlos场景均使用相同的定位方法,这使得其很难在los或nlos场景下各自实现最优的定位精度。
技术实现思路
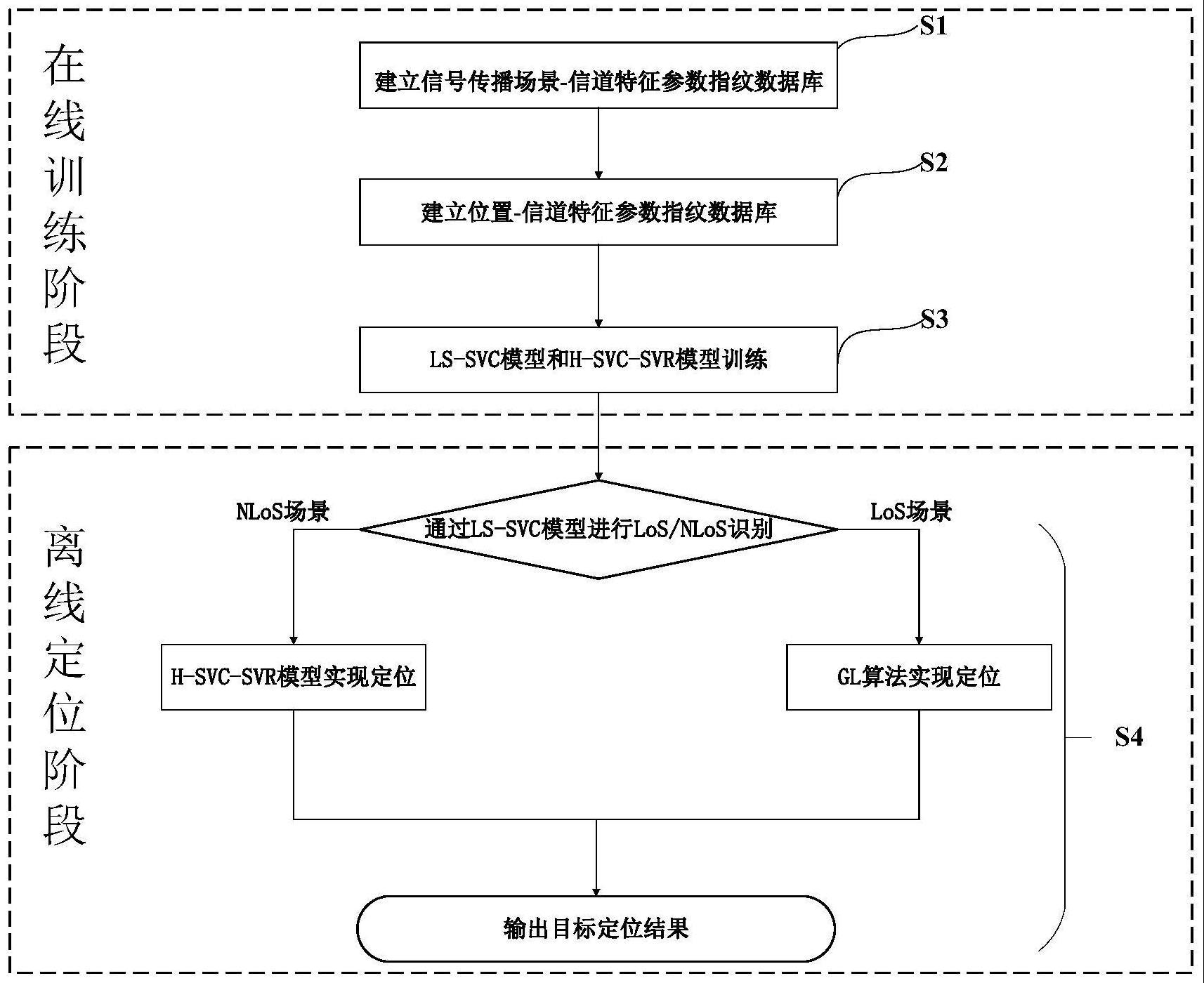
1、本发明的目的是为了提供一种基于混合指纹和视距/非视距识别的定位方法,该方法分为两个阶段:即在线训练阶段和离线定位阶段。在在线训练阶段:首先建立了与信号传播场景和目标位置相关的指纹数据库,其融合了多种大尺度、小尺度的信道特征参数以提高定位的精度,并训练了用于视距/非视距识别的最小二乘支持向量机模型和用于非视距场景下的定位模型分层式支持向量机分类-回归模型。在离线定位阶段,首先提取定位目标的信道参数特征集,并利用最小二乘支持向量机模型识别其传输的场景为视距还是非视距,然后在视距和非视距场景下分别使用几何定位算法和分层式支持向量机分类-回归模型进行定位,可以确保在两种场景下都能获得最佳的定位精度性能。
2、本发明的目的可以通过以下技术方案来实现:
3、一种基于混合指纹和视距/非视距识别的定位方法,包括以下步骤:
4、s1、获取访问节点(access point,ap)和不同位置的参考节点(reference point,rp)之间的信道冲击响应(channel impulse response,cir),提取视距(line-of-sight,los)/非视距(non-line-of-sight,nlos)场景下的信号传播场景-信道特征参数集,建立混合多种信道特征参数的信号传播场景=信道特征参数指纹数据库;
5、s2、提取与参考节点位置具有映射关系的位置-信道特征参数集,建立混合多种信道特征参数的位置一信道特征参数指纹数据库;
6、s3、将信号传播场景-信道特征参数指纹数据库中的参数集作为最小二乘支持向量机(least square-support vector classification,ls-svc)模型的输入并进行训练,输出信号传播场景识别结果;将位置-信道特征参数指纹数据库中的参数集作为分层式支持向量机分类-回归(hierarchical-support vector classification-support vectorregression,h-svc-svr)模型的输入并进行训练,输出定位结果;
7、s4、采集需要定位的目标的信道特征参数集,输入最小二乘支持向量机模型进行信号传播场景识别,当识别结果为视距场景时,利用几何定位算法(geometrical-localization,gl)进行定位,当识别结果为非视距场景时,利用分层式支持向量机分类-回归模型进行定位。
8、所述信号传播场景-信道特征参数集包括信道的增益、信道冲击响应的最大幅值、上升时间、平均超量时延、均方根时延扩展、峰度系数以及主径功率比。
9、所述信号传播场景一信道特征参数指纹数据库表示为:
10、
11、其中,为访问节点与第i个参考节点之间的视距/非视距标签,若为视距则标签若为非视距则标签nrp为参考节点位置的数量;为访问节点与第i个参考节点之间的信号传播场景=信道特征参数集。
12、所述最小二乘支持向量机模型通过求解能够正确划分训练数据集并且几何间隔最大的分离超平面将数据划分为不同的类别,类别划分如下式所示:
13、
14、其中,
15、
16、ω和b是分类模型参数,[·]t表示转置,为一个预定义的函数。
17、所述步骤s3中,在对最小二乘支持向量机模型进行训练时,对信号传播场景-信道特征参数集中的参数进行选择,并根据不同特征子集下最小二乘支持向量机模型输出结果的识别精度确定最优特征子集,作为最终模型的输入参数,对模型进行训练。
18、所述位置=信道特征参数集包括信道的增益、莱斯因子、均方根时延扩展、主径的功率、主径的时延、主径的水平到达角、主径的俯仰到达角、均方根水平到达角扩展、均方根俯仰到达角扩展。
19、所述位置-信道特征参数指纹数据库表示为:
20、
21、其中,rrp为所有nrp个参考节点的位置坐标集合,为位置-信道特征参数集。
22、所述分层式支持向量机分类-回归模型包含两个部分:h-svc模型和svr模型,h-svc模型用于判断需要进行定位的目标节点位于空间中的大致的空间区域,svr模型在h-svc模型的基础上对目标节点的具体位置进行估计,其中,h-svc模型是一个多分类器,结构为多层二叉树,每层都由有限数量的svc分类器组成。
23、所述步骤s3中,在对分层式支持向量机分类-回归模型进行训练时,对位置-信道特征参数集中的参数进行选择,并根据不同特征子集下分层式支持向量机分类-回归模型输出结果的识别精度确定最优特征子集,作为最终模型的输入参数,对模型进行训练。
24、所述步骤s3中,在对分层式支持向量机分类-回归模型进行训练时,首先按照层次结构训练h-svc模型中的相应svc分类器,在完成h-svc模型训练后,进行svr模型的训练。
25、本发明所提出的定位方法中,步骤s1至s3为在线训练阶段,完成指纹数据库的构建和ls-svc以及h-svc-svr模型的训练,步骤s4为离线定位阶段,完成对目标物体的定位。
26、与现有技术相比,本发明具有以下有益效果:
27、(1)本发明所构建的信号传播场景-信道特征参数指纹数据库混合了多种大尺度、小尺度的信道特征参数,可以准确反映由于信号传播场景变化而引起的信道特征参数的变化,利用此指纹数据库作为训练数据,可以得到高准确度的los/nlos识别模型,用来识别信号是在los还是nlos场景下进行传输。
28、(2)本发明所构建的位置-信道特征参数指纹数据库混合了多种精细化的信道特征参数,这些信道特征参数与rp和ap的位置有很强的关联性,利用此指纹数据库作为训练数据训练得到定位模型比仅使用单个,或少量信道特征参数进行训练的定位模型精度更高,鲁棒性更好。
29、(3)本发明构建了h-svc-svr模型以完成nlos场景下的定位并采用分层式的训练方式。分层次训练的方式的优势在于,与传统集中式训练方法相比,它是一种分布式的训练方式,每一层的svc分类器在训练时相互独立,可以并行训练,从而提高训练的效率;并且解决了集中式svm训练方式在大量标签存在时的高概率误差的问题。这使得训练得到h-svc-svr模型定位精度更高,鲁棒性更好。
30、(4)本发明在los/nlos场景下分别利用不同的定位方法进行定位,从而在los/nlos场景下都能实现最佳的定位性能,在复杂场景下定位精度更高,鲁棒性更好。
- 还没有人留言评论。精彩留言会获得点赞!