一种无人值守机房智能化仿生巡检系统及其巡检方法与流程
本发明涉及智能机器人,更具体地说,本发明涉及一种无人值守机房智能化仿生巡检系统及其巡检方法。
背景技术:
1、机房:旧时手工、丝棉织业的工作场所和生产单位的通称;现在指电脑学习室;在it业,机房普遍指的是电信、网通、移动、双线、电力以及政府或者企业等,存放服务器的,为用户以及员工提供it服务的地方。
2、机房是比较重要的场所,一般需要人工进行巡检,但是由于人工巡检效率低、成本高、风险大,而且人工巡检的次数较少,因此当机房发生危险时,难以及时的进行处理,从而导致损失较大,基于此,本发明设计了一种无人值守机房智能化仿生巡检系统及其巡检方法,以此解决以上问题。
技术实现思路
1、为了克服现有技术的不足,本发明提供了一种无人值守机房智能化仿生巡检系统及其巡检方法,具有巡检效率高,能够巡检范围大的优点。
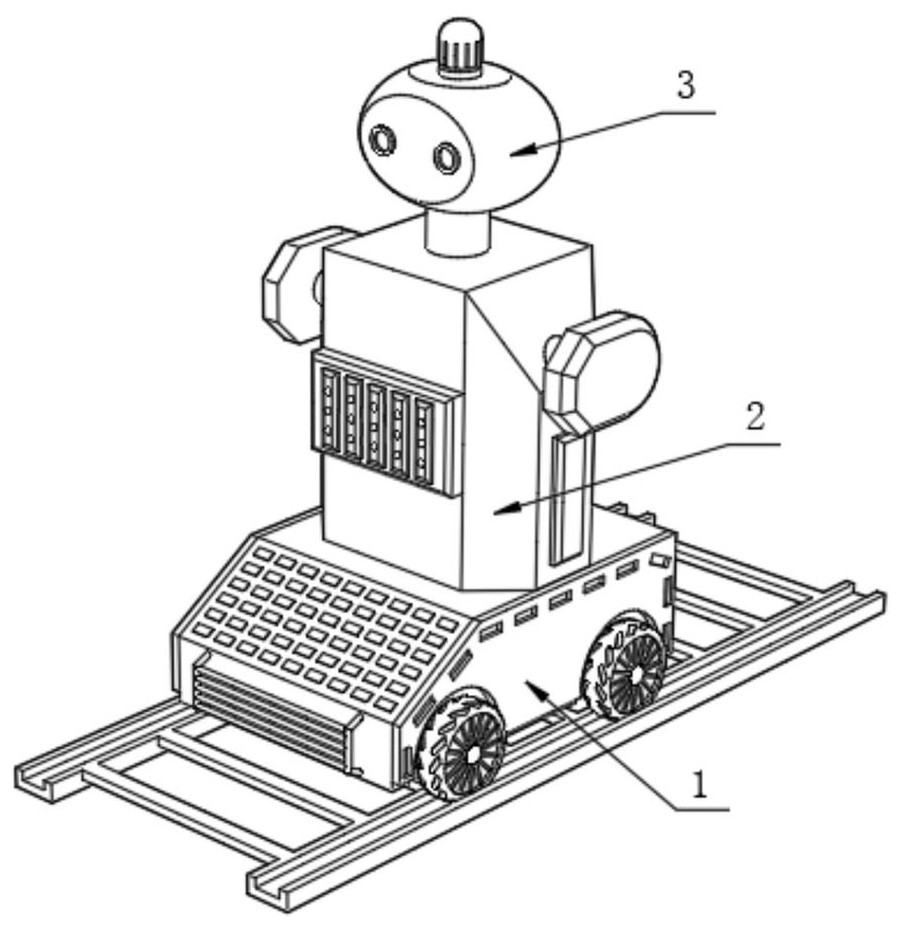
2、为实现上述目的,本发明提供如下技术方案:一种无人值守机房智能化仿生巡检系统及其巡检方法,包括底部巡检组件,底部巡检组件的上方固定安装有一信息采集组件,信息采集组件的顶部设置有一实时监视组件,实时监视组件通过多项调节组件进行调节,多项调节组件安装在信息采集组件的内部;
3、底部巡检组件包括一巡检特定轨道,巡检特定轨道固定安装在机房内的地面上,巡检特定轨道的上方运行有一巡检小车;
4、信息采集组件包括一机器人外壳,机器人外壳固定安装在巡检小车的上方,机器人外壳的顶端开设有一竖直通孔,竖直通孔与机器人外壳连通,机器人外壳的前表面上固定安装有一采集触头承载板,采集触头承载板的前侧由左至右依次安装有影像信息采集触头、设备运行数据采集触头、环境信息采集触头、红热外成像采集触头和温湿度采集触头;
5、实时监视组件包括一与竖直通孔相适配的竖直连接柱,竖直连接柱的顶端固定安装有一机器人头部,机器人头部的前表面上固定安装有两对称设置的实时监视摄像头;
6、多项调节组件包括一支撑横板,支撑横板固定安装在机器人外壳的内部,支撑横板上贯穿有一竖直连接轴,竖直连接轴通过驱动电机驱动,竖直连接轴的顶端固定安装有一多边形柱体,多边形柱体的顶端外侧滑动套接有一多边形套筒,多边形套筒的顶端面与竖直连接柱的底端面固定连接,多边形套筒的外侧底部固定套接有一连接轴承,连接轴承的内环与多边形套筒的外表面固定连接,连接轴承的外环上固定安装有一水平板,支撑横板的上表面固定安装有一电动伸缩杆,电动伸缩杆的伸缩端固定安装有一方形端板,方形端板的上表面与水平板的侧面通过连接斜杆活动连接。
7、作为本发明的一种优选技术方案,巡检小车的前侧固定安装有一可拆卸的板式照明灯,板式照明灯倾斜设置。
8、作为本发明的一种优选技术方案,机器人外壳的两侧均固定安装有一机器人侧臂,两机器人侧臂对称设置。
9、作为本发明的一种优选技术方案,竖直连接柱穿过竖直通孔,且竖直连接柱与竖直通孔配合使用,竖直连接柱的外表面与竖直通孔的内壁接触,且竖直连接柱的外表面与竖直通孔的内壁均光滑。
10、作为本发明的一种优选技术方案,机器人头部的顶端转动连接有一工字型转轴,工字型转轴的顶端固定安装有一警示灯,工字型转轴位于机器人头部内部的一端固定安装有一锥齿轮a。
11、作为本发明的一种优选技术方案,机器人头部的顶端开设有一配合轴孔,工字型转轴穿过机器人头部顶端的配合轴孔,且工字型转轴与机器人头部顶端的配合轴孔转动连接。
12、作为本发明的一种优选技术方案,机器人头部的背面固定安装有一微型马达,微型马达的输出端穿过机器人头部的背面且延伸至机器人头部的内部,微型马达的输出端固定安装有一与锥齿轮a相啮合的锥齿轮b。
13、作为本发明的一种优选技术方案,支撑横板的下表面固定安装有两对称设置的电机支座,驱动电机固定安装在电机支座上。
14、作为本发明的一种优选技术方案,连接斜杆的底端与方形端板的上表面通过铰座转动配合,连接斜杆的顶端与水平板的侧面通过另一铰座转动配合。
15、作为本发明的一种优选技术方案,一种无人值守机房智能化仿生巡检系统的巡检方法,包括以下步骤:
16、ss001:当需要进行巡检时,首先工作人员启动巡检小车的控制开关,通过巡检小车在巡检特定轨道上移动,从而能够带动信息采集组件和实时监视组件移动;
17、ss002:当信息采集组件移动时,信息采集组件上的影像信息采集触头能够对影像信息进行采集,信息采集组件上的设备运行数据采集触头能够对设备运行数据进行采集,信息采集组件上的环境信息采集触头能够对环境信息进行采集,信息采集组件上的红热外成像采集触头能够对红热外成像进行采集,信息采集组件上的温湿度采集触头能够对温湿度进行采集;
18、ss003:当实时监视组件移动时,实时监视组件上的实时监视摄像头能够对机房的内部进行实时监控,当有事故发生时,能够及时的发现,从而降低损失;
19、ss004:通过启动驱动电机的控制开关,能够带动竖直连接轴和多边形柱体转动,由于多边形套筒套接在多边形柱体的外侧,因此当多边形柱体转动时能够带动多边形套筒进行转动,由于多边形套筒的顶端面与竖直连接柱的底端面固定连接,因此当多边形套筒转动时能够带动整个实时监视组件进行转动,从而能够对实时监视摄像头的监控方向进行调整,从而使监控的效果更佳,另外通过启动电动伸缩杆的控制开关,能够带动方形端板移动,由于方形端板的上表面与水平板的侧面通过连接斜杆活动连接,因此当方形端板移动时能够通过连接斜杆带动水平板升降,由于水平板固定安装在连接轴承上,因此水平板的升降能够带动连接轴承、多边形套筒和实时监视组件整体升降,从而能够对实时监视摄像头的监控高度进行调整,进一步的提高了监控效果,从而使巡检效果更佳。
20、与现有技术相比,本发明的有益效果如下:
21、1、本发明通过启动巡检小车的控制开关,通过巡检小车在巡检特定轨道上移动,从而能够带动信息采集组件和实时监视组件移动;当信息采集组件移动时,信息采集组件上的影像信息采集触头能够对影像信息进行采集,信息采集组件上的设备运行数据采集触头能够对设备运行数据进行采集,信息采集组件上的环境信息采集触头能够对环境信息进行采集,信息采集组件上的红热外成像采集触头能够对红热外成像进行采集,信息采集组件上的温湿度采集触头能够对温湿度进行采集;当实时监视组件移动时,实时监视组件上的实时监视摄像头能够对机房的内部进行实时监控,当有事故发生时,能够及时的发现,从而降低损失;
22、2、本发明通过启动驱动电机的控制开关,能够带动竖直连接轴和多边形柱体转动,由于多边形套筒套接在多边形柱体的外侧,因此当多边形柱体转动时能够带动多边形套筒进行转动,由于多边形套筒的顶端面与竖直连接柱的底端面固定连接,因此当多边形套筒转动时能够带动整个实时监视组件进行转动,从而能够对实时监视摄像头的监控方向进行调整,从而使监控的效果更佳,另外通过启动电动伸缩杆的控制开关,能够带动方形端板移动,由于方形端板的上表面与水平板的侧面通过连接斜杆活动连接,因此当方形端板移动时能够通过连接斜杆带动水平板升降,由于水平板固定安装在连接轴承上,因此水平板的升降能够带动连接轴承、多边形套筒和实时监视组件整体升降,从而能够对实时监视摄像头的监控高度进行调整,进一步的提高了监控效果,从而使巡检效果更佳。
- 还没有人留言评论。精彩留言会获得点赞!