三维影像产生方法与流程
本发明涉及一种三维影像产生方法,尤其涉及一种可根据对应于相异时间的两影像产生另一影像,且据以产生三维影像的三维影像产生方法。
背景技术:
1、随着科技进展,越来越多专业人士使用光学辅助装置,以提高操作的便利度及精确度。举例而言,于牙医相关领域,当前已有口内扫描机,以辅助牙医检测口腔。口内扫描机可撷取口腔内的影像,将之转为数字资料,以助牙医及假牙技师等专业人士进行诊疗及假牙制作等。
2、当使用口内扫描机取得牙齿的影像时,由于口腔内的空间有限,使用者必须持续移动口内扫描机以取得多个影像,并拼接多个影像,从而产生三维影像。
3、实际上发现,口内扫描机产生的三维影像常发生不精准的形变,而导致影像品质不佳。根据分析,三维影像的品质不佳,常因于扫描机移动的距离过快、或使用者手部晃动等因素。采集的多个影像拼接后,造成产生的三维影像的品质下降。
4、因此,有必要设计一种新型的三维影像产生方法,以克服上述缺陷。
技术实现思路
1、本发明的目的在于提供一种三维影像产生方法,其能够使用三个二维影像进行拼接以产生三维影像而降低二维影像差异过大所导致的三维影像品质过低。
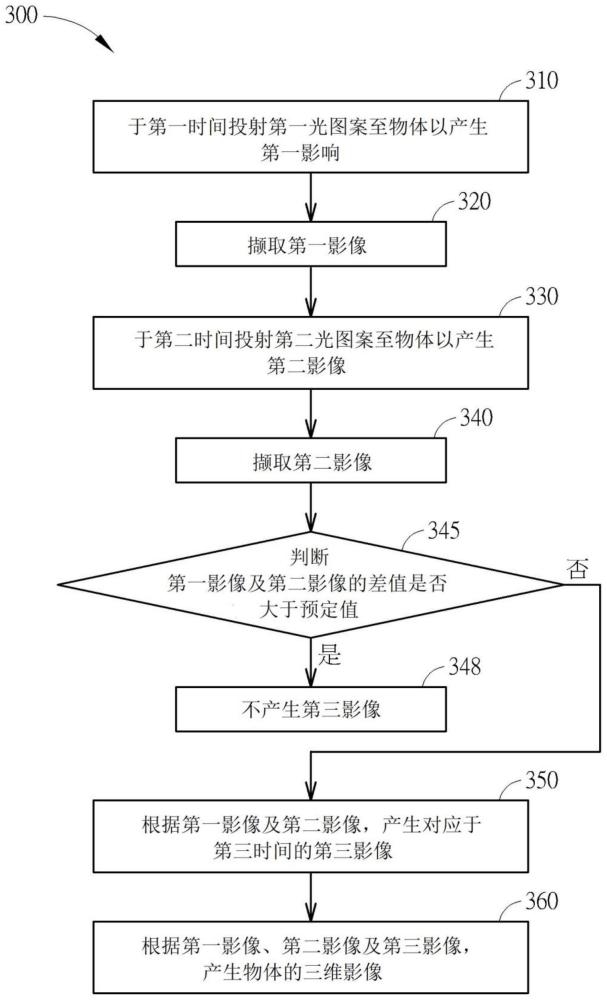
2、为达到上述目的,本发明提供了一种三维影像产生方法,包括:于第一时间投射第一光图案至物体以产生第一影像;撷取该第一影像;于第二时间投射第二光图案至该物体以产生第二影像;撷取该第二影像;根据该第一影像及该第二影像,产生对应于第三时间的第三影像;及根据该第一影像、该第二影像及该第三影像,产生该物体的三维影像;其中该第一时间先于该第二时间,及该第二时间先于该第三时间。
3、较佳的,该第一光图案相同于该第二光图案。
4、较佳的,根据该第一影像及该第二影像,产生对应于该第三时间的该第三影像,包含:根据该第一影像的第一条纹的第一座标位置、及该第二影像的第二条纹的第二座标位置,产生该第三影像的第三条纹的第三座标位置。
5、较佳的,该第一影像的该第一条纹的该第一座标位置为s12,该第二影像的该第二条纹的该第二座标位置为s21,该第三影像的该第三条纹的该第三座标位置为s31,且s31=(s12+s21)/2。
6、较佳的,该第一影像的该第一条纹的该第一座标位置为s11,该第二影像的该第二条纹的该第二座标位置为s21,该第三影像的该第三条纹的该第三座标位置为s31,且s31=(s21-s11)+s21。
7、较佳的,还包含:判断该第一影像及该第二影像的差值是否大于预定值;其中当该第一影像及该第二影像的该差值小于该预定值,产生该第三影像。
8、本发明还提供一种三维影像产生方法,包含:于第一时间投射第一光图案至物体以产生第一影像;撷取该第一影像;于第三时间投射第二光图案至该物体以产生第三影像;撷取该第三影像;根据该第一影像及该第三影像,产生对应于第二时间的第二影像;及根据该第一影像、该第二影像及该第三影像,产生该物体的三维影像;其中该第一时间先于该第二时间,及该第二时间先于该第三时间。
9、较佳的,该第一光图案相同于该第二光图案。
10、较佳的,根据该第一影像及该第三影像,产生对应于该第二时间的该第二影像,包含:根据该第一影像的第一条纹的第一座标位置、及该第三影像的第三条纹的第三座标位置,产生该第二影像的条纹的第二座标位置。
11、较佳的,该第一影像的该第一条纹的该第一座标位置为s11,该第三影像的该第三条纹的该第三座标位置为s31,该第二影像的该第二条纹该第二座标位置为s21,且s21=(s11+s31)/2。
12、较佳的,该第一影像的该第一条纹的该第一座标位置为s12,该第三影像的该第三条纹的该第三座标位置为s31,该第二影像的该第二条纹该第二座标位置为s22,且s22=s12+(s12-s31)。
13、较佳的,还包含:判断该第一影像及该第三影像的差值是否大于预定值;其中当该第一影像及该第三影像的该差值小于该预定值,产生该第二影像。
14、本发明还提供一种三维影像产生方法,包含:于第二时间投射第一光图案至物体以产生第二影像;撷取该第二影像;于第三时间投射第二光图案至该物体以产生第三影像;撷取该第三影像;根据该第二影像及该第三影像,产生对应于第一时间的第一影像;及根据该第一影像、该第二影像及该第三影像,产生该物体的三维影像;其中该第一时间先于该第二时间,及该第二时间先于该第三时间。
15、较佳的,该第一光图案相同于该第二光图案。
16、较佳的,根据该第一影像及该第三影像,产生对应于该第二时间的该第二影像,包含:根据该第二影像的第二条纹的第二座标位置、及该第三影像的第三条纹的第三座标位置,产生该第一影像的第一条纹的第一座标位置。
17、较佳的,该第二影像的该第二条纹该第二座标位置为s22、该第三影像的该第三条纹该第三座标位置为s31,该第一影像的该第一条纹该第一座标位置为s12,且s12=(s31+s22)/2。
18、较佳的,该第二影像的该第二条纹的该第二座标位置为s21、该第三影像的该第三条纹的该第三座标位置为s31,该第一影像的该第一条纹的该第一座标位置为s12,且s12=s31+(s31-s21)。
19、较佳的,还包含:判断该第二影像及该第三影像的差值是否大于预定值;其中当该第二影像及该第三影像的该差值小于该预定值,产生该第一影像。
20、与现有技术相比,本发明实施例提供的一种三维影像产生方法,于第一时间投射第一光图案至物体以产生第一影像;撷取第一影像;于第二时间投射第二光图案至物体以产生第二影像;撷取第二影像;根据第一影像及第二影像,产生对应于第三时间的第三影像;及根据第一影像、第二影像及第三影像,产生物体的三维影像;其中第一时间先于第二时间,及第二时间先于第三时间,如此,能够使用三个二维影像进行拼接以产生三维影像而降低二维影像差异过大所导致的三维影像品质过低。
技术特征:
1.一种三维影像产生方法,其特征在于,包括:
2.如权利要求1所述的三维影像产生方法,其特征在于,根据该第一影像及该第二影像,产生对应于该第三时间的该第三影像,包含:
3.如权利要求2所述的三维影像产生方法,其特征在于,该第一影像的该第一条纹的该第一座标位置为s12,该第二影像的该第二条纹的该第二座标位置为s21,该第三影像的该第三条纹的该第三座标位置为s31,且s31=(s12+s21)/2。
4.如权利要求2所述的三维影像产生方法,其特征在于,该第一影像的该第一条纹的该第一座标位置为s11,该第二影像的该第二条纹的该第二座标位置为s21,该第三影像的该第三条纹的该第三座标位置为s31,且s31=(s21-s11)+s21。
5.如权利要求1所述的三维影像产生方法,其特征在于,还包含:
6.一种三维影像产生方法,其特征在于,包含:
7.如权利要求6所述的三维影像产生方法,其特征在于,根据该第一影像及该第三影像,产生对应于该第二时间的该第二影像,包含:
8.如权利要求7所述的三维影像产生方法,其特征在于,该第一影像的该第一条纹的该第一座标位置为s11,该第三影像的该第三条纹的该第三座标位置为s31,该第二影像的该第二条纹该第二座标位置为s21,且s21=(s11+s31)/2。
9.如权利要求7所述的三维影像产生方法,其特征在于,该第一影像的该第一条纹的该第一座标位置为s12,该第三影像的该第三条纹的该第三座标位置为s31,该第二影像的该第二条纹该第二座标位置为s22,且s22=s12+(s12-s31)。
10.如权利要求6所述的三维影像产生方法,其特征在于,还包含:
11.一种三维影像产生方法,其特征在于,包含:
12.如权利要求1或6或11所述的三维影像产生方法,其特征在于,该第一光图案相同于该第二光图案。
13.如权利要求11所述的三维影像产生方法,其特征在于,根据该第一影像及该第三影像,产生对应于该第二时间的该第二影像,包含:
14.如权利要求13所述的三维影像产生方法,其特征在于,该第二影像的该第二条纹该第二座标位置为s22、该第三影像的该第三条纹该第三座标位置为s31,该第一影像的该第一条纹该第一座标位置为s12,且s12=(s31+s22)/2。
15.如权利要求13所述的三维影像产生方法,其特征在于,该第二影像的该第二条纹的该第二座标位置为s21、该第三影像的该第三条纹的该第三座标位置为s31,该第一影像的该第一条纹的该第一座标位置为s12,且s12=s31+(s31-s21)。
16.如权利要求11所述的三维影像产生方法,其特征在于,还包含:
技术总结
本发明提供一种三维影像产生方法,包含于第一时间投射第一光图案至物体以产生第一影像,撷取第一影像,于第二时间投射第二光图案至物体以产生第二影像,撷取第二影像,根据第一影像及第二影像以产生对应于第三时间的第三影像,及根据第一影像、第二影像及第三影像以产生物体的三维影像。第一时间先于第二时间,及第二时间先于第三时间。
技术研发人员:吴宗训,吴壮为,黄敏雄
受保护的技术使用者:苏州佳世达光电有限公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!