一种基于标定和复合搜索的相机自动对焦方法及系统与流程
本发明属于图像对焦,更具体地,涉及一种基于标定和复合搜索的相机自动对焦方法及系统。
背景技术:
1、高倍相机的景深一般较小,尤其是达到显微镜级别时,景深仅数微米,因此在对焦精度良好时一般会用于测量观测物体的表面高度。此类相机一般采用定焦镜头,由于机构运动精度、待测物体表面高度的偏差等原因,需要通过调整物镜与待观测物体的表面距离以实现对焦。基于此方法的自动对焦一般按照锐度评估+搜索迭代的流程进行。
2、目前的搜索方法一般包括二分法、斐波那契法、黄金分割法、爬上搜索法和基于规则的搜索等。二分法、斐波那契法和黄金分割法有相对良好的搜索效率,但是当搜索范围过大时,其搜索的稳定性差,可能找不到对焦位置;爬山法需要确定镜头的实际焦距和镜头f数,相对难以操作;基于规则的搜索在精细搜索过程中的搜索效率较低。
3、目前搜索迭代收敛的条件为:当拍摄达到预设的次数或者图像达到预设的锐度时停止迭代,完成自动对焦。但是,当图像采集内容不同时,对焦时的锐度绝对值也不同,进而导致实际对焦距离会有较大差异;随着初始位置的不同,相同迭代次数后的对焦距离也会不同。对焦距离的不稳定一方面影响图像质量,另一方面也无法应用于高精度的观察物体表面高度测量。
技术实现思路
1、针对现有技术的缺陷,本发明的目的在于提供一种基于标定和复合搜索的相机自动对焦方法及系统,旨在解决采用现有搜索方式进行自动对焦时,当图像采集内容不同,对焦时的锐度绝对值也不同,进而导致实际对焦距离会有较大差异;随着初始位置的不同,相同迭代次数后的对焦距离也会不同。对焦距离的不稳定一方面影响图像质量,另一方面也无法应用于高精度的观察物体表面高度测量的问题。
2、为实现上述目的,本发明提供了一种基于标定和复合搜索的相机自动对焦方法,包括以下步骤:
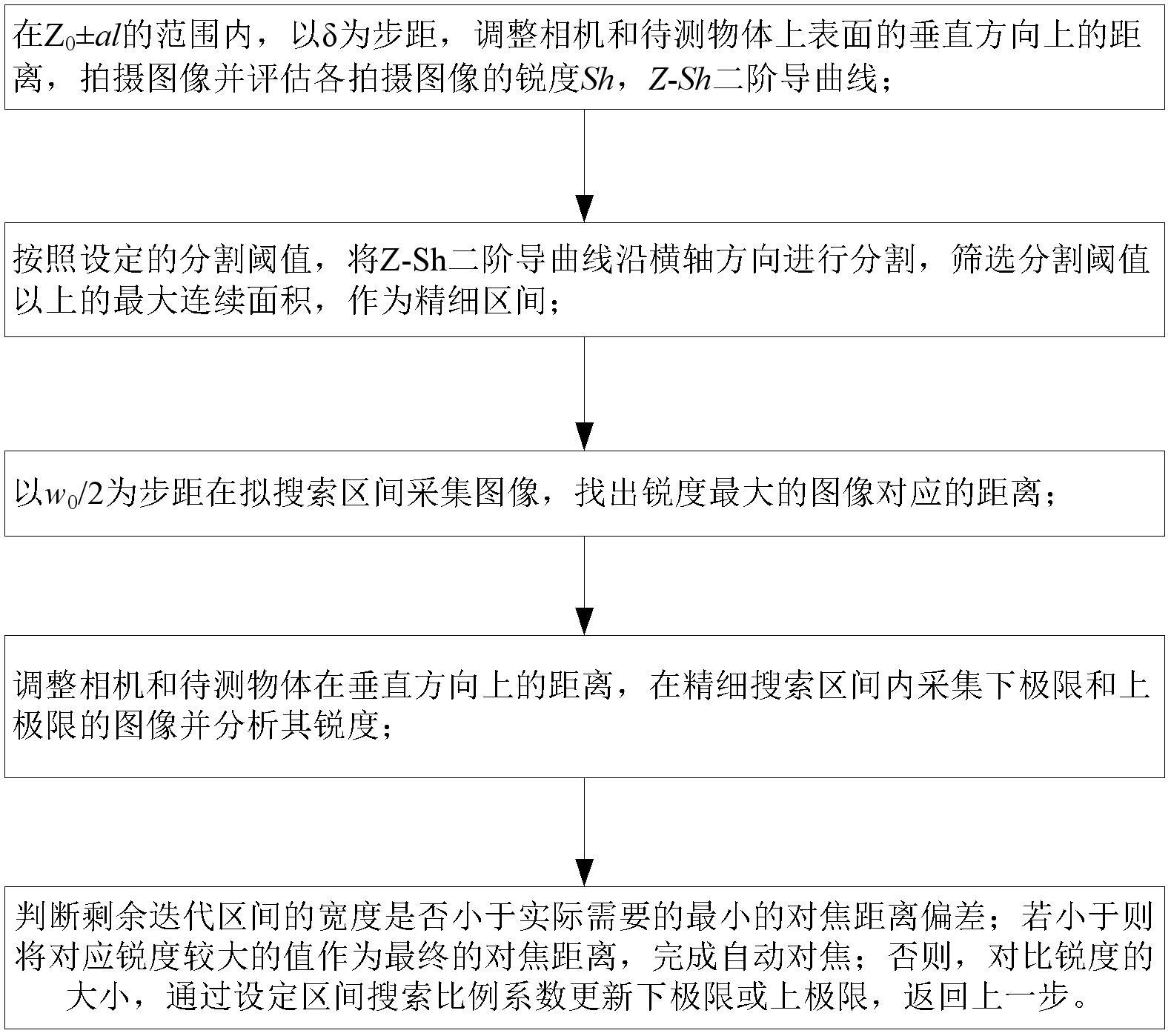
3、步骤一:在的范围内,以为步距δ,调整相机和待测物体上表面的垂直方向上的距离,拍摄图像并评估各拍摄图像的锐度 sh, z- sh二阶导曲线;其中,为相机最小的对焦距离偏差;为理论景深;为精细区间系数;为能够观察到最清晰图像对应的相机与待测物体在垂直方向上的距离;垂直方向为相机的焦平面的垂直方向;
4、步骤二:按照设定的分割阈值d2_thresh,将 z- sh二阶导曲线沿横轴方向进行分割,筛选出d2_thresh以上的最大连续面积,作为精细区间;其中,精细区间的z跨度为精细区间的带宽;
5、步骤三:以为步距在拟搜索区间采集图像,找出锐度最大的图像对应的距离;其中,为相机实际对焦距离与理论对焦距离的偏差;
6、步骤四:调整相机和待测物体在垂直方向上的距离,在精细搜索区间内采集下极限和上极限的图像并分析其锐度和;
7、步骤五:判断剩余迭代区间的宽度是否小于实际需要的最小的对焦距离偏差;若小于则将和中对应锐度较大的值作为最终的对焦距离,完成自动对焦;否则,对比锐度和的大小,通过设定区间搜索比例系数更新下极限或上极限,转至步骤四;其中,。
8、进一步优选地,图像的锐度计算方法为:
9、对图像沿横纵两个方向使用sobel算子求解边缘图像;
10、评估边缘图像的标准差,获取图像的锐度值。
11、进一步优选地,相机实际对焦距离与理论对焦距离的偏差包括相机的理论焦距误差、自动化调整相机和待测物体在垂直方向上距离时产生的机械运动偏差以及待测物体的高度偏差。
12、进一步优选地,当更新为=+(-)·(1-);
13、当的更新公式为=-(-)·(1-);
14、其中,为每次迭代的区间收缩比例系数。
15、进一步优选地,步骤一具体包括以下步骤:
16、s1.1:在的范围内,以为步距,调整相机和待测物体上表面的垂直方向上的距离,拍摄图像并评估各拍摄图像的锐度 sh,绘制 z- sh曲线;
17、s1.2:对 z- sh曲线中的 sh进行归一化处理,再对 z- sh曲线平滑滤波,去除干扰;
18、s1.3:对经过s1.2处理过的 z- sh曲线求二阶导后取其绝对值并归一化,得到 z- sh二阶导曲线。
19、另一方面,本发明提供了一种基于标定和复合搜索的相机自动对焦系统,包括:自动化机构、相机和数据处理模块;
20、自动化机构与相机相连;相机的下方用于放置待测物体;
21、自动化机构用于调整相机和待测物体上表面的垂直方向上的距离;
22、相机用于在的范围内,以为步距,拍摄图像;其中,为相机最小的对焦距离偏差;为理论景深;为精细区间系数;为能够观察到最清晰图像对应的相机与待测物体在垂直方向上的距离;垂直方向为相机的焦平面的垂直方向;
23、并用于以为步距在拟搜索区间内拍摄图像;其中,为相机实际对焦距离与理论对焦距离的偏差;为精细区间的z跨度;
24、并用于在精细搜索区间内采集下极限和上极限的图像;
25、数据处理模块用于对相机在的范围内拍摄的图像评估锐度,绘制 z- sh二阶导曲线;按照设定的分割阈值d2_thresh,将 z- sh二阶导曲线沿横轴方向进行分割,筛选出d2_thresh以上的最大连续面积,作为精细区间;
26、并用于以为步距在拟搜索区间采集图像,找出锐度最大的图像对应的距离;
27、并用于评估下极限和上极限的图像的锐度和;判断剩余迭代区间的宽度是否小于实际需要的最小的对焦距离偏差;若小于则将和中对应锐度较大的值作为最终的对焦距离,完成自动对焦;否则,通过设定区间搜索比例系数更新下极限或上极限;其中,。
28、进一步优选地,图像的锐度计算方法为:
29、对图像沿横纵两个方向使用sobel算子求解边缘图像;
30、评估边缘图像的标准差,获取图像的锐度值。
31、进一步优选地,相机实际对焦距离与理论对焦距离的偏差包括相机的理论焦距误差、自动化调整相机和待测物体在垂直方向上距离时产生的机械运动偏差以及待测物体的高度偏差。
32、进一步优选地,当更新为=+(-)·(1-);
33、当的更新公式为=-(-)·(1-);
34、其中,为每次迭代的区间收缩比例系数。
35、进一步优选地,数据处理模块绘制 z- sh二阶导曲线的具体步骤如下:
36、在的范围内,以为步距,调整相机和待测物体上表面的垂直方向上的距离,拍摄图像并评估各拍摄图像的锐度 sh,绘制 z- sh曲线;
37、对 z- sh曲线中的 sh进行归一化处理,再对 z- sh曲线平滑滤波,去除干扰;
38、对处理过的 z- sh曲线求二阶导后取其绝对值并归一化,得到 z- sh二阶导曲线。
39、总体而言,通过本发明所构思的以上技术方案与现有技术相比,具有以下有益效果:
40、本发明提供了一种基于标定和复合搜索的相机自动对焦方法及系统,其中,通过精细区间的标定(详见步骤一~步骤二),为是否需要大范围搜索和大范围搜索的步长提供了等距搜索的依据(以为步距在拟搜索区间采集图像,找出锐度最大的图像对应的距离),在保证大范围搜索效率的同时提高了精细区间定位的稳定性,同时在精细区间采用指数搜索替代等距搜索,提高了搜索收敛的效率。
41、本发明提供了一种基于标定和复合搜索的相机自动对焦方法及系统,其中,以剩余迭代区间的宽度()小于实际需要的最小的对焦距离偏差作为收敛条件,在不同采集内容和不同初始位置下,最终的收敛距离值更稳定,重复精度最高可以达到硬件的极限精度,因此可以得到更稳定的图像质量并用于物体表面的高度测量。
42、本发明提供了一种基于标定和复合搜索的相机自动对焦方法及系统,其中,在大范围下的精细区间查找过程中,采用等距搜索方式以确定精细搜索区间,即以为步距在拟搜索区间采集图像;在精细搜索区间采用按比例收缩的方式逼近锐度最佳的距离(的更新公式为=+(-)·(1-);的更新公式为=-(-)·(1-);),提高了搜索收敛的效率。
- 还没有人留言评论。精彩留言会获得点赞!