一种道路车位视频巡检定位方法及系统与流程
本发明涉及道路智慧停车,尤其涉及一种道路车位视频巡检定位方法及系统。
背景技术:
1、视频采集技术目前已广泛应用于城市道路车位的车牌信息检测和收费管理中,视频巡检车模式由于投入成本低,使用灵活等优点获得了越来越多的关注。视频巡检车采用gps或北斗定位在信号覆盖不好的道路上,gps或北斗定位巡检车存在导航信号差,定位精度低和通讯信号传输延时的问题,造成车牌信息与车位信息匹配困难,进而导致订单信息丢失。
2、在相关技术中,为弥补这一缺点,不少厂家推出了基于rfid(radio frequencyidentification,射频识别)定位的视频巡检车技术。但由于rfid标签的读写距离较大,且rfid天线的读取范围为扇形区域,导致安装于视频巡检车上rfid天线只能起到启动相机拍照的作用,不能实现对视频巡检车的准确定位。
技术实现思路
1、本发明所要解决的技术问题在于提供一种道路车位视频巡检定位方法及系统,旨在解决相关技术中视频巡检车上的读写器不能实现对视频巡检车准确定位的问题。
2、为解决上述技术问题,本发明第一方面提供了一种道路车位视频巡检定位方法,包括:
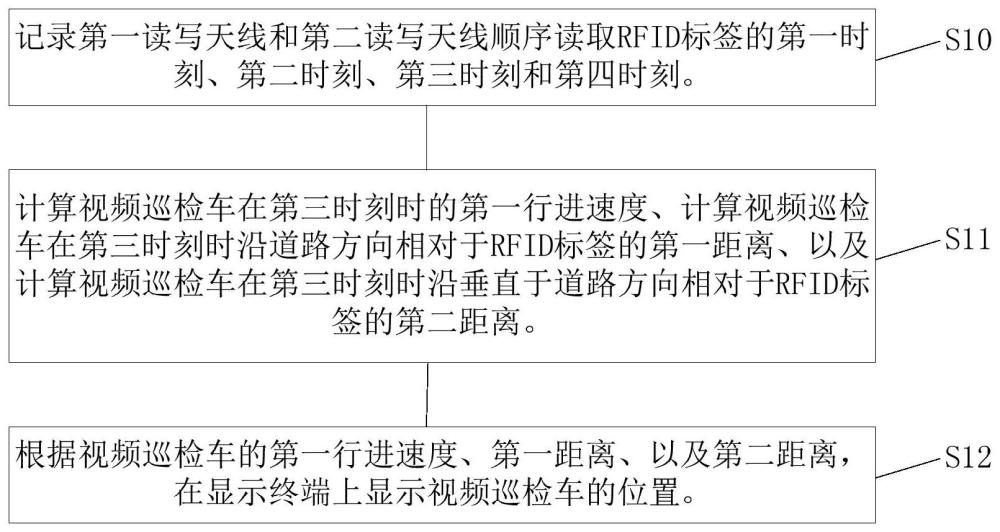
3、记录第一读写天线和第二读写天线顺序读取rfid标签的第一时刻、第二时刻、第三时刻和第四时刻;其中,所述第一时刻为所述第一读写天线第一次读取所述rfid标签的时刻,所述第二时刻为所述第一读写天线最后一次读取所述rfid标签的时刻,所述第三时刻为所述第二读写天线第一次读取所述rfid标签的时刻,所述第四时刻为所述第二读写天线最后一次读取所述rfid标签的时刻,所述第一读写天线和所述第二读写天线的辐射/接收角度至少部分重合;
4、计算所述视频巡检车在所述第三时刻时的第一行进速度、计算所述视频巡检车在所述第三时刻时沿道路方向相对于所述rfid标签的第一距离、以及计算所述视频巡检车在所述第三时刻时沿垂直于道路方向相对于所述rfid标签的第二距离;
5、根据所述视频巡检车的所述第一行进速度、所述第一距离、以及所述第二距离,在显示终端上显示所述视频巡检车的位置。
6、可选地,所述计算所述视频巡检车在所述第三时刻时的第一行进速度的步骤,包括:
7、基于预设第一行进速度计算公式,计算所述视频巡检车在所述第三时刻时的第一行进速度;所述预设第一行进速度计算公式表示为:
8、v1=d0/(t3-t1);
9、其中,v1为所述视频巡检车的所述第一行进速度,d0为所述第一读写天线和所述第二读写天线之间的距离,t3为所述第三时刻,t1为所述第一时刻。
10、可选地,所述计算所述视频巡检车在所述第三时刻时沿道路方向相对于所述rfid标签的第一距离的步骤,包括:
11、基于预设第一距离计算公式,计算所述视频巡检车在所述第三时刻时沿道路方向相对于所述rfid标签的第一距离;所述预设第一距离计算公式表示为:
12、d1=(t3-(t2+t3)/2)*d0/(t3-t1);
13、其中,d1为所述第一距离,t3为所述第三时刻,t2为所述第二时刻,t1为所述第一时刻,d0为所述第一读写天线和所述第二读写天线之间的距离。
14、可选地,所述计算所述视频巡检车在所述第三时刻时沿垂直于道路方向相对于所述rfid标签的第二距离的步骤,包括;
15、基于预设第二距离计算公式,计算所述视频巡检车在所述第三时刻时沿垂直于道路方向相对于所述rfid标签的第二距离;所述预设第二距离计算公式表示为:
16、d2=d0*cot(θ/2)/2-d0*(t3-t2)/(t3-t1);
17、其中,d2为所述第二距离,d0为所述第一读写天线和所述第二读写天线之间的距离,cot为余切函数,θ为所述第一读写天线或所述第二读写天线的辐射/接收角度,且所述第一读写天线或所述第二读写天线的辐射/接收角度相同,t3为所述第三时刻,t2为所述第二时刻,t1为所述第一时刻。
18、可选地,在所述根据所述视频巡检车的所述第一行进速度、所述第一距离、以及所述第二距离,在显示终端上显示所述视频巡检车的位置的步骤之后,还包括:
19、计算所述视频巡检车在所述第四时刻时的第二行进速度;
20、基于所述第一行进速度和所述第二行进速度计算所述视频巡检车的第三行进速度;
21、确定所述第三行进速度为所述视频巡检车的实际行进速度。
22、可选地,所述计算所述视频巡检车在所述第四时刻时的第二行进速度的步骤,包括:
23、基于预设第二行进速度计算公式,计算所述视频巡检车在所述第四时刻时的第二行进速度;所述预设第二行进速度计算公式表示为:
24、v2=d0/(t4-t2);
25、其中,v2为所述视频巡检车的第二行进速度,d0为所述第一读写天线和所述第二读写天线之间的距离,t4为所述第四时刻,t2为所述第二时刻。
26、可选地,所述基于所述第一行进速度和所述第二行进速度计算所述视频巡检车的第三行进速度的步骤,包括:
27、基于预设第三行进速度计算公式,计算所述视频巡检车的第三行进速度;所述预设第三行进速度计算公式表示为:
28、v3=(v1+v2)/2;
29、其中,v3为所述视频巡检车的第三行进速度,v1为所述视频巡检车的所述第一行进速度,v2为所述视频巡检车的所述第二行进速度。
30、可选地,道路上设置有多个间隔距离相同的rfid标签;在所述根据所述视频巡检车的所述第一行进速度、所述第一距离、以及所述第二距离,在显示终端上显示所述视频巡检车的位置的步骤之后,还包括:
31、记录所述第一读写天线和所述第二读写天线顺序读取下一rfid标签的时刻第五时刻、第六时刻、第七时刻、第八时刻;其中,所述第五时刻为所述第一读写天线第一次读取下一rfid标签的时刻,所述第六时刻为所述第一读写天线最后一次读取下一rfid标签的时刻,所述第七时刻为所述第二读写天线第一次读取下一rfid标签的时刻,所述第八时刻为所述第二读写天线最后一次读取下一rfid标签的时刻;
32、计算所述视频巡检车在所述第五时刻时的第四行进速度;
33、比较所述视频巡检车的所述第三行进速度和所述第四行进速度,并根据比较结果判断所述视频巡检车是否在行进过程中停留。
34、可选地,所述计算所述视频巡检车在所述第五时刻时的第四行进速度的步骤,包括:
35、基于预设第四行进速度计算公式,计算所述视频巡检车在所述第五时刻时的第四行进速度;所述预设第四行进速度计算公式表示为:
36、v4=l/(t5-t1);
37、其中,v4为所述视频巡检车的第四行进速度,l为车位的长度,t5为所述第五时刻,t1为所述第一时刻。
38、本发明第二方面提供了一种道路车位视频巡检定位系统,包括视频巡检车,所述视频巡检车采用如上中任一项所述的定位方法定位。
39、本发明中一种道路车位视频巡检定位方法及系统与相关技术相比,有益效果在于:在通过计算得到视频巡检车的第一行进速度第一距离和第二距离后,可以确定视频巡检车与rfid标签之间的横向距离和纵向距离,同时视频巡检车以第一行进速度行驶,从而可以精确定位视频巡检车位置和速度,以在显示终端的电子地图内实时显示视频巡检车的位置。而且,本方案采用双读写天线,可以大大减少rfid标签漏检的比率,提升视频采集的可靠性。
- 还没有人留言评论。精彩留言会获得点赞!