一种基于5G传输的网联无人机管理云平台的制作方法
本发明属于无人机管理,具体涉及一种基于5g传输的网联无人机管理云平台。
背景技术:
1、随着无人机技术的快速发展,其已经逐渐应用到人们日常生活或者工作的各个领域之中,例如地质勘探、巡检巡航以及水上救援等领域均有涉及,但是无人机的续航能力较差,一般其单次巡航周期只能保持在30~60min,为保证其能够在执行任务中安全返航,对其巡航能力的管理显然是十分必要的,结合5g网络的传输速率,使得无人机续航能力能够及时反馈至无人机管理云平台,保证无人机巡航任务的有序执行。
2、现有技术中,无人机管理云平台多是通过续航能力直接对巡航中的无人机进行管理与调度,在其续航能力不足时,便会强制性将其调度至起始点,但是无人机在巡航过程中,难免会遇到紧急情况,此时将无人机调度回起始点显然是不合理的,或者巡航区域的勘探即将完成时执行返航,此时便需要二次执行巡航任务,这无疑会导致资源的浪费,基于此,本方案提供了一种能够辅助无人机规划迫降点,延长其执行巡航任务时长的管理云平台。
技术实现思路
1、本发明的目的是提供一种基于5g传输的网联无人机管理云平台,能够辅助无人机规划迫降点,延长其执行巡航任务时长,实现对无人机巡航的合理化管理。
2、本发明采取的技术方案具体如下:
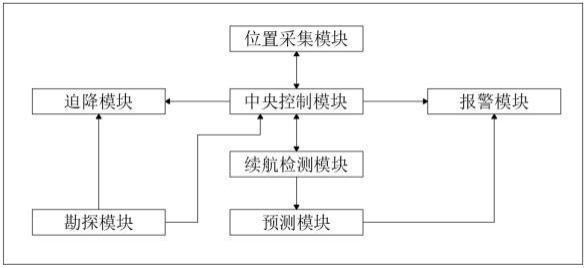
3、一种基于5g传输的网联无人机管理云平台,包括位置采集模块、续航监测模块、报警模块、预测模块、勘探模块、迫降模块以及中央控制模块;
4、所述位置采集模块用于实时获取无人机的位置信息;
5、所述续航监测模块用于实时获取无人机的电池电量,并依据所述无人机的电池电量测算无人机的续航里程;
6、所述报警模块用于根据所述无人机的位置信息和续航里程判断无人机是否需要返航;
7、若是,则发出报警信号,并向无人机飞控发送返航指令;
8、若否,则表明所述无人机续航能力正常,且以当前节点为结束节点构建监控时段,并在所述监控时段内设置多个采样节点,且将各个所述采样节点下无人机的电池电量标定为待评估参数;
9、所述预测模块用于根据待评估参数测算预测节点下无人机的预测电量,以及预测节点下无人机的预测里程,且在所述预测里程大于或等于返航点与无人机位置之间的距离时,发出预警信号;
10、所述勘探模块用于采集巡航区域中的图像信息,并将所述图像信息上传至云端存储;
11、所述迫降模块用于在报警信号发出时,根据所述图像信息寻找迫降点,并在所述迫降点确定之后,测算迫降点与无人机实时位置之间的距离;
12、中央控制模块,所述中央控制模块用于收发所述位置采集模块、续航监测模块、报警模块、预测模块、勘探模块以及迫降模块之间的流转信息。
13、在一种优选方案中,所述续航监测模块包括监测单元和测算单元,所述监测单元用于实时采集所述无人机的电池电量,所述测算单元用于测算无人机的续航里程,且所述测算单元内预设有测算函数;
14、将所述无人机的电池电量和续航系数输入至测算函数中,能实时输出所述无人机的续航里程;
15、其中,所述续航系数为单位电量下无人机的行进里程。
16、在一种优选方案中,所述报警模块执行时,会实时获取所述无人机的位置坐标以及返航点坐标之间的距离,并将其标定为待评估里程;
17、对所述待评估里程和无人机的续航里程进行做差处理,得到偏差里程数;
18、所述报警模块内设置有用于与偏差里程数进行比对的评估阈值;
19、所述偏差里程数大于或等于评估阈值时,则表明所述无人机续航能力正常;
20、所述偏差里程数小于评估阈值时,则表明所述无人机续航能力不足。
21、在一种优选方案中,所述预测模块包括趋势分析单元和预测单元,所述趋势分析单元用于根据待评估参数测算无人机的电池电量损耗趋势值,所述预测单元用于根据当前节点下无人机的实际电量、电池电量损耗趋势值以及预测节点与当前节点之间的时段测算无人机的预测电量;
22、其中,所述趋势分析单元的执行优先级高于预测单元的执行优先级。
23、在一种优选方案中,所述趋势分析单元内预设有趋势分析函数,将所述待评估参数输入至趋势分析函数中后,其输出结果被标定为电池电量损耗趋势值;
24、所述预测单元内预设有预测函数,将所述当前节点下的无人机的实际电量、电池电量损耗趋势值以及预测节点与当前节点之间的时段输入至预测函数后,其输出结果被标定为预测电量。
25、在一种优选方案中,所述勘探模块包括摄录单元和测量单元,所述摄录单元用于采集巡航区域中的图像信息,所述测量单元用于拾取巡航区域的边缘坐标以及测量巡航区域面积;
26、其中,所述测量单元内设置有测量函数,所述测量函数用于根据巡航区域的边缘坐标测算巡航区域面积。
27、在一种优选方案中,所述摄录单元为采样相机,所述采样相机用于摄录无人机续航区域内的环境信息;
28、其中,所述采样相机为双目相机。
29、在一种优选方案中,所述迫降模块依据所述测量单元确定无人机的安全降落面积,并根据所述安全降落面积对续航区域进行拆分处理,得到多个待评估区域;
30、所述迫降模块包括用于对待评估区域执行筛分处理的筛分单元,所述筛分单元内设置有安全降落面积对应的标准图像,在其执行时,将所述待评估区域对应的图像标定为待评估图像,再将所述待评估图像与标准图像进行比对,得到图像相似度;
31、其中,所述筛分单元内还设有用于与图像相似度相比对的筛分阈值;
32、当所述图像相似度大于或等于筛分阈值时,则将其对应的所述待评估区域标定为临时迫降点;
33、当所述图像相似度小于筛分阈值时,则将其对应的所述待评估区域标定为非迫降点。
34、在一种优选方案中,所述报警信号发出后,且所述无人机执行返航,则不向所述迫降模块发送执行指令;
35、所述迫降模块接收执行指令时,同步计算所有临时迫降点与无人机之间的距离,并将其标定为待校验里程;
36、将所述待校验里程与续航里程进行实时比较;
37、若所述待校验里程大于或等于续航里程,则将其对应的临时迫降点标定为不可执行迫降点;
38、若所述待校验里程小于续航里程,则将其对应的临时迫降点标定为可执行迫降点。
39、本发明还提供了,一种基于5g传输的网联无人机管理终端,包括:
40、至少一个处理器;
41、以及与所述至少一个处理器通信连接的存储器;
42、其中,所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行上述的基于5g传输的网联无人机管理云平台。
43、本发明取得的技术效果为:
44、本发明能够根据无人机的电量测算其续航里程,并在续航能力不足时发出报警信号,且根据报警信号可以选择返航或者继续巡航,继续巡航的过程中会为其规划临时迫降点,延长其执行巡航任务时长,在续航能力正常时,会通过预测模块来预测无人机的预测里程,辅助操作者提前规划无人机的巡航任务,且还能够在其续航能力不足之前提前发出预警信号,实现对无人机巡航的合理化管理,提升无人机巡航管理的灵活性。
- 还没有人留言评论。精彩留言会获得点赞!