一种降低滤波器组多载波系统的峰均功率比的方法
本发明属于移动通信,具体指一种降低滤波器组多载波系统(fbmc)的峰均功率比(papr)的方法。
背景技术:
1、随着科技的进步与通信技术的快速发展,人们对于移动通信的要求越来越高,滤波器组多载波技术(filter bank multicarrier,fbmc)的研究成为人们关注的焦点。滤波器组多载波技术可有效提高数据传输效率和信道可靠性。与现有的正交频分复用技术(orthogonal frequency division multiplexing,ofdm)相比,滤波器组多载波系统具有较低的正交性要求,不需要严格的同步,而ofdm子载波对频偏敏感。fbmc具有更高的频谱效率,无需循环前缀对抗符号间干扰,采用非矩形原型滤波器,旁瓣很低,避免了不相邻载波间的干扰。但是滤波器组多载波系统有严重的子带交叠现象,为了避免这种情况,通常采用偏移正交幅度调制(offset quadrature amplitude modulation,oqam)与fbmc系统相结合。然而fbmc-oqam技术与ofdm技术一样都存在峰均功率比(peak-to-average powerratio,papr)较高的问题,这将导致信号失真,系统性能下降等问题。papr是一种用于衡量信号波形在传输中出现峰值功率过大的重要参数,其表示信号的峰值功率与平均功率之间的比值,因此降低fbmc系统的papr是新一代移动通信需要解决的问题。
技术实现思路
1、为解决fbmc系统存在峰均功率比过高的问题,一般采用部分传输序列(partialtransmit sequence,pts)算法,但考虑到pts算法的计算复杂度较高,本发明提供一种pts算法与改进粒子群优化(particle swarm optimization,pso)算法相结合的方法,去降低fbmc系统的papr。
2、为了达到上述目的,本发明采用的技术方案:
3、一种降低滤波器组多载波系统的峰均功率比的方法,具体步骤如下:
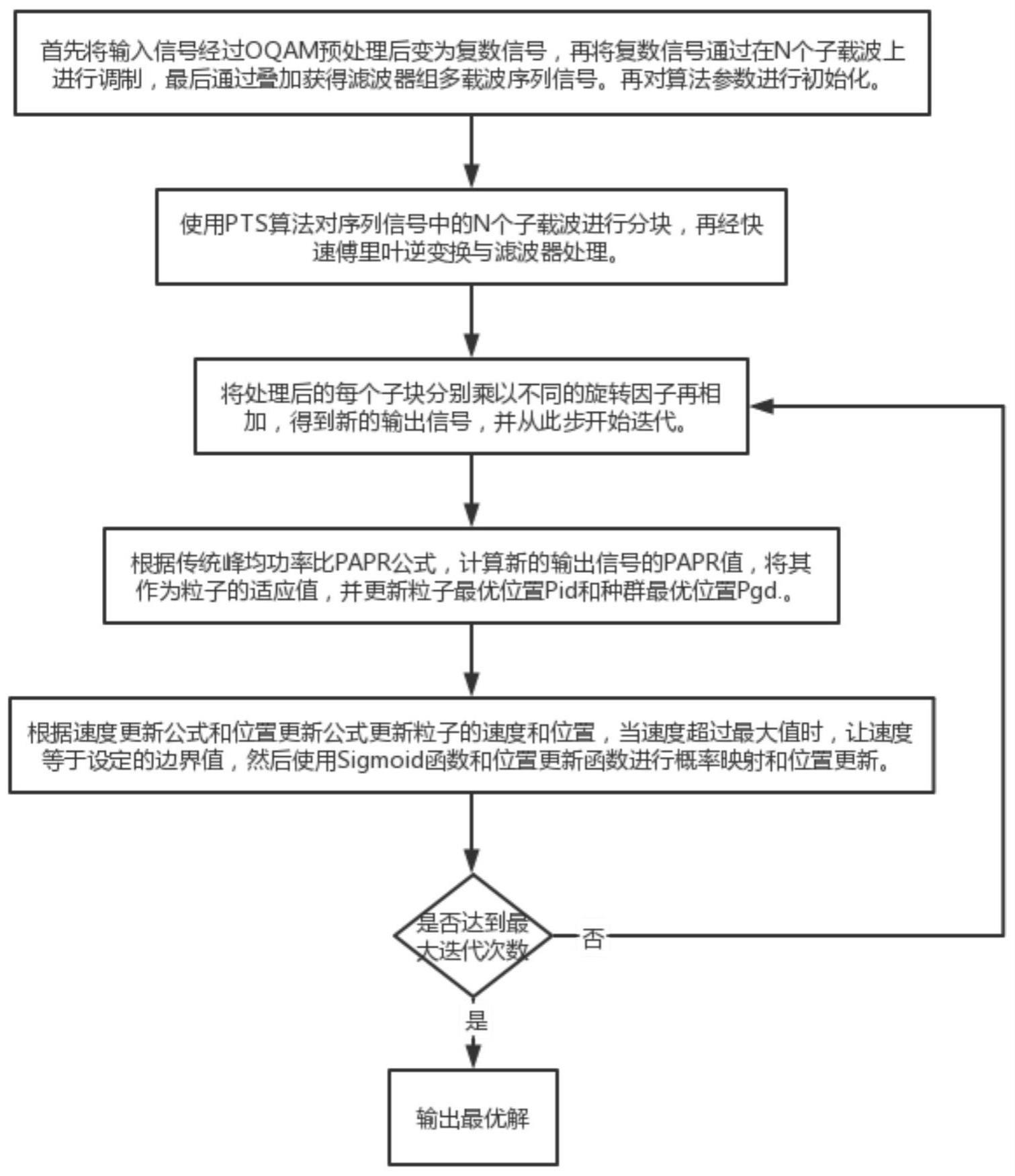
4、步骤(1),首先,将输入信号经过oqam预处理后变为复数信号,再将复数信号通过在n个子载波上进行调制,最后通过叠加获得滤波器组多载波序列信号。然后,在u(u≥2)维空间随机生成p个具有位置和速度的粒子群,并对部分传输序列算法(pts算法)参数与改进粒子群优化算法(pso算法)参数进行初始化。参数具体如下:
5、设置pso算法初始惯性权重wini,最终惯性权重wend,缩放因子δ,学习因子c1和c2,学习因子c1的最大值c11,最小值c12,学习因子c2的最小值c21,最大值c22,最大速度限制vmax,位置xid,粒子最优位置pid,种群最优位置pgd,旋转因子bv,最大迭代次数g,pts分块数v,符号数l,子载波n。
6、步骤(2),使用pts算法对步骤(1)得到的滤波器组多载波序列信号中的n个子载波进行分块,再对其进行快速傅里叶逆变换(inverse fast fourier transform,ifft)与滤波器处理。具体如下:
7、步骤2.1:使用pts算法对输出信号中的n个子载波进行分块
8、将n个子载波信号划分成v个子数据块,其中随机划分法降低papr的效果最强,因此本发明选取随机分割法,从n个子载波中随机分配个子载波到一个子数据块内进行分割。
9、步骤2.2:对分割完的子块进行ifft变换
10、步骤2.3:再将经步骤2.2后的子块进行滤波器处理
11、所述的滤波器采用phydyas滤波器,通常选取k=4,当k=4时对应的频域采样系数h0为1,h1为0.971960,h2为h3为0.235147。
12、步骤(3),将处理后的每个子块分别乘以不同的相位旋转因子再相加,得到新的输出信号,并从此步开始迭代。
13、每个子数据块乘以不同的相位旋转因子bv,再将每个子数据块相加,可得新的输出信号,相位旋转因子bv为:
14、
15、其中,相位的取值范围为[0,2π),通常在中取有限个点,旋转因子bv为离散值,v为每个子块的序号。
16、步骤(4),根据传统峰均功率比papr公式,计算步骤(3)得到的新输出信号的papr值,将其作为粒子的适应值,并更新粒子最优位置pid和种群最优位置pgd.。具体如下:
17、步骤4.1:计算新的输出信号的papr值
18、在计算papr时,fbmc-oqam系统与传统ofdm不同,它具有重叠的数据块结构,因此需要重新定义papr,本发明将新输出信号s(t)分成不同间隔的数据块结构以适应fbmc-oqam系统的特点,可以将s(t)分成l+k个段,那么每段间隔的papr可以通过公式(1)求得,并将计算得到的papr值作为粒子的适应值:
19、
20、其中,|s(t)|是输入信号的幅度值,e{·}为信号的期望;i表示段的序列号;t表示时域周期。
21、通常采用互补累积函数(complementary cumulative distribution,ccdf)来衡量低滤波器组多载波系统的峰均比,其表示信号papr大于γ的概率,式子为:
22、ccdf(papr)=p(papr>γ)=1-p(papr≤γ)=1-(1-e-γ)n(3)
23、其中,p表示某一件事的概率,γ表示门限值;n表示ifft的位数。
24、步骤4.2:更新粒子最优位置pid和种群最优位置pgd
25、根据公式(2)计算出新输出信号的papr值后,将其作为粒子的适应值,根据适应值越小,粒子适应能力越强的原则,更新粒子最优位置pid和种群最优位置pgd。
26、步骤(5),由步骤(4)可得粒子最优位置pid和种群最优位置pgd,根据速度更新公式和位置更新公式更新粒子的速度和位置,当速度超过最大值时,让速度等于设定的边界值,然后使用sigmoid函数和位置更新函数进行概率映射和位置更新。具体如下:
27、步骤5.1:更新粒子的速度和位置
28、速度更新公式为:
29、vid(g+1)=δ*w(g)*vid(g)+c1(g)*rand*(pid(g)-xid(g))+c2(g)*rand*(pgd(g)-xid(g))
30、
31、
32、其中,δ·w(g)·vid(g)为惯性部分,表示粒子对上一次未迭代粒子速度的继承。对算法进行改进增加δ,δ为缩放因子,增加了粒子的惯性权重,从而增加了粒子的速度,促进了粒子对全局的搜索。w(g)为惯性权重因子,一般用来平衡全局搜索和局部搜索,w(g)采用线性变化表达式,当粒子开始搜索时,w(g)较大,粒子会进行全局搜索,随着时间和迭代次数的增加,w(g)逐渐减小,粒子会从全局搜索转变为局部搜索。vid(g)表示每次迭代的粒子速度。c1表示粒子下一步动作来源于自身经验所占的权重,若c1=0,会丧失种群多样性,易陷入局部最优解,为无私型粒子群算法。c2表示粒子下一步动作来源于其他粒子经验所占的权重,若c2=0,会丧失社会部分,失去每次迭代最优解的信息,收敛速度缓慢,为自我认知型粒子群算法。c1和c2都不为0时,两者兼顾,可以保持搜索效果和搜索效率的平衡,为完全型粒子群算法。
33、c1(g)·rand·(pid(g)-xid(g))为自我认知部分,粒子学习上一次未迭代粒子的部分,其中rand为随机数。c2(g)·rand·(pgd(g)-xid(g))为全局认知部分,是粒子学习群体最优的部分。较小的c1值,会使粒子全局搜索能力变弱,较大的c2值,会使粒子过早的进行局部最优解的搜索,因此,对算法进行改进,学习因子c1和c2采用非线性表达式,让其随着迭代次数的增加改变。
34、wini表示惯性因子的初始值;wend表示惯性因子的结束值。c11表示学习因子c1的最大值;c12表示学习因子c1的最小值;c21表示学习因子c2的最小值;c22表示学习因子c2的最大值。g表示当前迭代的次数,g表示总迭代次数。
35、步骤5.2:限制速度vid(g+1)的范围
36、对每个粒子的移动速度vid(g+1)的范围进行限制,以权衡算法的探索能力与效率。当粒子的速度较大时,它们具备更强的搜索能力,能够覆盖更广泛的搜索空间,但这也可能导致它们在搜索过程中忽略掉一些潜在的最优解。这种情况下,粒子的移动距离较大,但需要防止过度追求速度而忽略了全局最优解的可能性。相反,当粒子的速度较小时,它们的搜索能力较弱,可能会局限在某个局部区域,无法有效地跳出局部最优解,算法的收敛速度会变得较慢,因为粒子的移动距离较小,所以需要对粒子的最大和最小速度进行限制,速度限制表达式为:
37、
38、其中,-vmax表示速度移动范围的最小值;vmax表示速度移动范围的最大值。vid(g+1)表示下一次迭代的粒子速度。
39、步骤5.3:使用sigmoid函数和位置更新函数进行概率映射和位置更新
40、使用sigmoid函数对速度vid进行概率映射,将速度vid映射到[0,1]范围内,转换成位变化概率,即某位变化的概率。在pso算法中,当速度vid越接近0时,粒子位变化的概率就越高。但在搜索寻优的过程中,当速度vid接近0时,粒子是越来越靠近最优解的,位变化的概率应越来越小,而算法反而却越大,影响了算法的寻优能力;当速度vid不接近0时,位变化的概率应是越来越大,进行寻优。原始sigmoid函数在速度vid等于0时,值为0.5,位变化的概率较高,影响全局搜索能力,改进后的sigmoid函数在速度vid较大时,位变化的概率较大,在速度vid接近0时,位变化的概率较小,满足搜索寻优条件。
41、所述改进后的sigmoid函数为:
42、
43、当粒子的最优位置为0时,粒子的当前位状态可能为1,因此需要采取行动以最大程度将粒子的位状态转变为0。相反地,当粒子的最优位置为1时,粒子的当前位状态可能为0,这时需要调整粒子的位状态以使其接近1。原始位置更新函数仅仅基于sigmoid函数与随机数rand的比较来决定位状态的变化,当sigmoid函数大于rand随机数时,让xid(g+1)为1,否则,让xid(g+1)为0,而没有考虑到粒子之前的位状态。
44、改进后的位置更新函数基于sigmoid函数与随机数比较来确定是否进行位变化。当sigmoid函数大于随机数时,表示速度不接近于零,此时位变化的概率较高,因此需要执行位变化操作。如果当前位置xid(g)为0,则将其更新为1;如果当前位置xid(g)为1,则将其更新为0。反之,当sigmoid函数小于随机数时,表示速度接近于零,位变化的概率较低,因此保持原位状态不进行位变化操作。
45、进一步,所述改进后的位置更新函数为:
46、
47、步骤(6),判断是否达到设置的最大迭代次数,若满足,则当前种群的最优位置xid则为要寻找的最优解,即为求得的最优papr值,否则返回步骤3。
48、本发明的有益效果为:
49、(1)本发明对速度更新公式增加了缩放因子δ,增加了粒子的惯性权重,从而提高了粒子对全局的搜索能力,并且改进学习因子c1和c2,采用非线性表达式,让其随着迭代次数的增加改变,平衡搜索效果和搜索效率。
50、(2)本发明改进sigmoid函数和位置更新函数,当速度vid接近0时,位变化的概率越来越小;当速度vid不接近0时,位变化的概率越来越大,并使用位置更新函数进行位变化,能够增强算法的寻优能力。
51、(3)本发明不仅能够有效降低fbmc系统的papr,还能够降低计算过程的复杂度。
- 还没有人留言评论。精彩留言会获得点赞!