航空相机双框架变速扫描成像起步协同控制方法及系统
本发明涉及航空相机成像控制,尤其涉及航空相机双框架变速扫描成像起步协同控制方法及系统。
背景技术:
1、航空相机作为重要航空遥感光电设备,具有时效性强、分辨率高以及机动灵活等特点。既能够弥补卫星侦察的时效性和细节信息不足的缺陷,又可以克服地面侦察受到的空间地域限制;被广泛应用于边境侦察、情报获取、目标监视、资源普查、地形测绘以及灾害评估等军民许多领域。
2、航空相机通过扫描成像方式能够提高相机的横向视场角,有效提高相机的成像效率,同时提高了对边境战争地区监视侦察的安全性。早期传统航空相机采用俯角框架系统作为主轴扫描成像,位角框架系统进行前向像移补偿,仅能垂直于飞机航向的正侧视方向进行扫描成像。随着基于快速补偿镜像移补偿技术的突破,位角框架系统从单一的前向像移补偿功能中逐步解放出来,位角框架和俯角框架可以同时作为主轴进行扫描成像。在位角和俯角双框架协同速度扫描成像时,扫描方向不再局限于垂直于飞机航向,进一步扩展到任意方向,提高了航空相机广域成像的机动性和作业效率。伴随着这种位角和俯角双框架协同扫描成像方向的机动性,针对同一规则或不规则目标,航空相机从不同方向上的扫描成像时,要求不同扫描行条带区域的框架扫描速度必须有所变化,才能进一步保证航空相机分辨率和成像质量。
3、因此,本技术提出了航空相机双框架变速扫描成像起步协同控制方法及系统。通过位角和俯角双框架采用有效的起步协同控制方法,使航空相机在不同扫描行变速动态扫描成像作业中,提高位角框架和俯角框架的快速性、准确性和同步性,从而保障图像曝光均匀性,缩短拍照周期和提高拍照效率。
技术实现思路
1、本技术的目的是提供航空相机双框架变速扫描成像起步协同控制方法及系统,旨在解决上述的问题。
2、为实现上述目的,本技术提供如下技术方案:
3、本技术提供航空相机双框架变速扫描成像起步协同控制方法,包括:
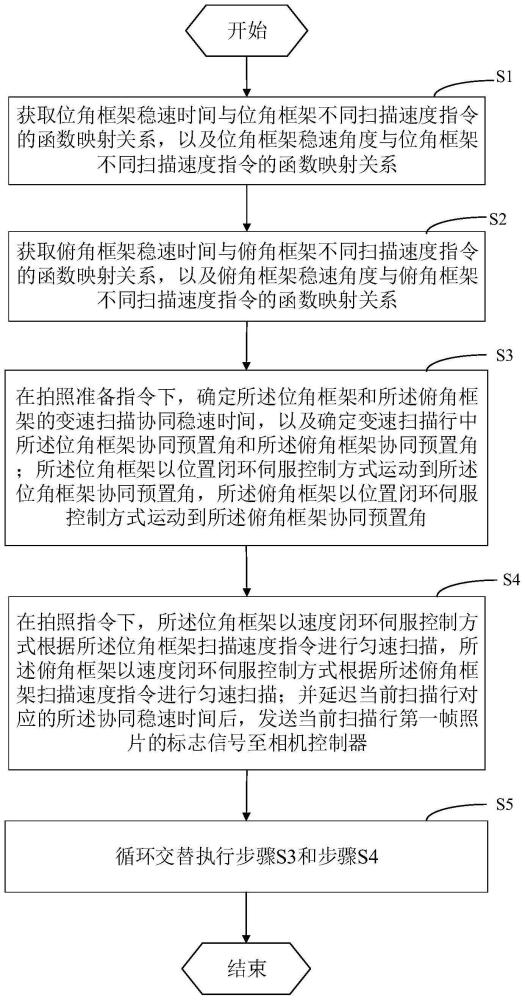
4、获取位角框架稳速时间与位角框架不同扫描速度指令ωr的函数映射关系以及位角框架稳速角度ψ稳与位角框架不同扫描速度指令ωr的函数映射关系ψ稳=ψ(ωr);
5、获取俯角框架稳速时间与俯角框架不同扫描速度指令ωr的函数映射关系以及俯角框架稳速角度θ稳与俯角框架不同扫描速度指令ωr的函数映射关系θ稳=θ(ωr);
6、在拍照准备指令下,确定所述位角框架和所述俯角框架的变速扫描协同稳速时间t稳,以及确定变速扫描行中所述位角框架协同预置角ψ0和所述俯角框架协同预置角θ0;所述位角框架以位置闭环伺服控制方式运动到所述位角框架协同预置角ψ0,所述俯角框架以位置闭环伺服控制方式运动到所述俯角框架协同预置角θ0;
7、在拍照指令下,所述位角框架以速度闭环伺服控制方式根据所述位角框架扫描速度指令ωr进行匀速扫描,所述俯角框架以速度闭环伺服控制方式根据所述俯角框架扫描速度指令ωr进行匀速扫描;并延迟当前扫描行对应的所述协同稳速时间t稳后,发送当前扫描行第一帧照片的标志信号至相机控制器。
8、进一步的,在获取位角框架稳速时间与位角框架不同扫描速度指令ωr的函数映射关系以及位角框架稳速角度ψ稳与位角框架不同扫描速度指令ωr的函数映射关系ψ稳=ψ(ωr)的步骤中,具体包括下述步骤:
9、在所述位角框架的最大扫描速度指令范围内,取若干个离散速度点其中符号表示为向上取整;所述位角框架以速度闭环伺服控制方式,分别记录所述位角框架从零速ω0起步阶跃到所述离散速度点的起步稳速对应的稳速时间和对应位角框架走过的稳速角度即数组和其中ω0=0,
10、当时,则与符号相同;当时,则当时,则利用matlab曲线拟合,通过数组拟合位角框架稳速时间与位角框架不同扫描速度指令ωr的函数映射关系式通过数组拟合位角框架稳速角度ψ稳与位角框架不同扫描速度指令ωr的函数映射关系式ψ稳=ψ(ωr)。
11、进一步的,在获取俯角框架稳速时间与俯角框架不同扫描速度指令ωr的函数映射关系以及俯角框架稳速角度θ稳与俯角框架不同扫描速度指令ωr的函数映射关系θ稳=θ(ωr)的步骤中,具体包括下述步骤:
12、在所述俯角框架的最大扫描速度指令范围内,取若干个离散速度点其中符号表示为向上取整;所述俯角框架以速度闭环伺服控制方式,分别记录所述俯角框架从零速ω0起步阶跃到所述离散速度点的起步稳速对应的稳速时间和对应俯角框架走过的稳速角度即数组和其中ω0=0,
13、当时,则与符号相同;当时,则当时,则利用matlab曲线拟合,通过数组拟合俯角框架稳速时间与俯角框架不同扫描速度指令ωr的函数映射关系式通过数组拟合俯角框架稳速角度θ稳与俯角框架不同扫描速度指令ωr的函数映射关系式θ稳=θ(ωr)。
14、进一步的,在拍照准备指令下,确定所述位角框架和所述俯角框架的变速扫描协同稳速时间t稳,以及确定变速扫描行中所述位角框架协同预置角ψ0和所述俯角框架协同预置角θ0;所述位角框架以位置闭环伺服控制方式运动到所述位角框架协同预置角ψ0,所述俯角框架以位置闭环伺服控制方式运动到所述俯角框架协同预置角θ0的步骤中,具体包括下述步骤:
15、在拍照准备指令下,接收所述相机控制器发送的位角框架扫描行起始角ψ1、位角框架扫描行结束角ψ2和位角框架扫描速度指令ωr,接收相机控制器发送的俯角框架扫描行起始角θ1、俯角框架扫描行结束角θ2和俯角框架扫描速度指令ωr;
16、根据当前扫描行所述位角框架扫描速度指令ωr计算当前扫描行位角框架稳速协同角度δψ;根据当前扫描行俯角框架扫描速度指令ωr计算当前扫描行俯角稳速协同角度δθ;
17、若则所述位角框架稳速协同角度δψ=ψ(ωr),所述俯角框架稳速协同角度若则所述位角框架稳速协同角度所述俯角框架稳速协同角度δθ=θ(ωr),其中sign为符号函数;
18、则当前扫描行中所述位角框架协同预置角ψ0=ψ1+δψ,所述俯角框架的协同预置角θ0=θ1+δθ;
19、所述位角框架以位置闭环伺服控制方式运动到所述位角框架协同预置角ψ0,所述俯角框架以位置闭环伺服控制方式运动到所述俯角框架协同预置角θ0。
20、进一步的,在拍照指令下,所述位角框架以速度闭环伺服控制方式根据所述位角框架扫描速度指令ωr进行匀速扫描,所述俯角框架以速度闭环伺服控制方式根据所述俯角框架扫描速度指令ωr进行匀速扫描;并延迟当前扫描行对应的所述协同稳速时间t稳后,发送当前扫描行第一帧照片的标志信号至相机控制器的步骤中,具体包括下述步骤:
21、在拍照指令下,所述位角框架以速度闭环伺服控制方式从所述位角框架预置角ψ0以零速ω0起步阶跃加速到所述位角框架扫描速度指令ωr,耗时t稳历经δψ到达所述位角框架扫描行起始角ψ1并实现匀速ωr稳定状态;位角框架继续以速度闭环伺服控制方式从所述位角框架扫描行起始角ψ1匀速ωr运动到所述位角框架扫描行结束角ψ2;
22、所述俯角框架以速度闭环伺服控制方式从所述俯角框架预置角θ0以零速ω0起步阶跃加速到所述俯角框架扫描速度指令ωr,耗时t稳历经δθ到达所述俯角框架扫描行起始角θ1并实现匀速ωr稳定状态;俯角框架继续以速度闭环伺服控制方式从所述俯角框架扫描行起始角θ1匀速ωr运动到所述俯角框架扫描行结束角θ2;
23、从接收到所述相机控制器下发的拍照指令开始,延迟协同稳速时间t稳,发送当前扫描行第一帧照片的标志信号至相机控制器,所述位角框架和所述俯角框架均已到达各自扫描速度指令的匀速稳定状态,且位角框架和俯角框架均到达各自扫描行起始角,相机根据重叠率连续间隔拍摄当前扫描行后续照片。
24、本技术提供航空相机双框架变速扫描成像起步协同控制系统,包括:
25、获取模块:获取位角框架稳速时间与位角框架不同扫描速度指令ωr的函数映射关系以及位角框架稳速角度ψ稳与位角框架不同扫描速度指令ωr的函数映射关系ψ稳=ψ(ωr);获取俯角框架稳速时间与俯角框架不同扫描速度指令ωr的函数映射关系以及俯角框架稳速角度θ稳与俯角框架不同扫描速度指令ωr的函数映射关系θ稳=θ(ωr);
26、控制模块:在拍照准备指令下,确定所述位角框架和所述俯角框架的变速扫描协同稳速时间t稳,以及确定变速扫描行中所述位角框架协同预置角ψ0和所述俯角框架协同预置角θ0;所述位角框架以位置闭环伺服控制方式运动到所述位角框架协同预置角ψ0,所述俯角框架以位置闭环伺服控制方式运动到所述俯角框架协同预置角θ0;
27、扫描模块:在拍照指令下,所述位角框架以速度闭环伺服控制方式根据所述位角框架扫描速度指令ωr进行匀速扫描,所述俯角框架以速度闭环伺服控制方式根据所述俯角框架扫描速度指令ωr进行匀速扫描;并延迟当前扫描行对应的所述协同稳速时间t稳后,发送当前扫描行第一帧照片的标志信号至相机控制器。
28、本技术提供一种设备,所述设备包括处理器、与所述处理器耦接的存储器,其中,所述存储器存储有用于实现航空相机双框架变速扫描成像起步协同控制方法的程序指令;所述处理器用于执行所述存储器存储的所述程序指令以实现航空相机双框架变速扫描成像起步协同控制。
29、本技术提供一种存储介质,存储有处理器可运行的程序指令,所述程序指令用于执行航空相机双框架变速扫描成像起步协同控制方法。
30、本技术提供了航空相机双框架变速扫描成像起步协同控制方法及系统,具有以下有益效果:
31、本技术通过分别获取位角框架和俯角框架的稳速时间、稳速角度与各自不同扫描速度指令的函数映射关系,在拍照准备指令下,确定位角框架和俯角框架的变速扫描协同稳速时间,确定位角框架和俯角框架各自预置角,位角框架和俯角框架均以位置闭环伺服控制方式运动到各自预置角;在拍照指令下,位角框架和俯角框架均以速度闭环伺服控制方式分别按当前扫描行各自框架扫描速度指令进行匀速扫描,并延迟当前扫描行协同稳速时间后发送当前扫描行第一帧照片的标志信号至相机控制器;使航空相机在不同扫描行变速动态扫描成像作业中,每个扫描行第一帧曝光时刻位角框架和俯角框架均到达各自扫描行起始角;且位角框架和俯角框架的扫描速度均能契合达到各自扫描行要求的匀速稳定状态,使得航空相机成像的扫描方向不再局限于垂直于飞机航向,成像目标区域也不受形状限制;提高航空相机动态广域成像的机动性和作业效率,同时保证航空相机动态扫描成像品质和提高图像后期处理效率。
- 还没有人留言评论。精彩留言会获得点赞!