投影仪无感梯形校准方法、装置及投影仪与流程
本公开涉及投影仪,尤其涉及一种投影仪无感梯形校准方法、装置及投影仪。
背景技术:
1、目前市场上,投影仪在做梯形校准时,通常先出一个特征图像,根据特征图像中的特征点计算对应的偏航yaw角度变化,再对桌面投影的原图做梯形校准,然而这种方式极其依赖特征图像的准确性,并且最终梯形校准后的投影效果较差。
技术实现思路
1、本发明的目的是提供一种投影仪无感梯形校准方法、装置及投影仪,旨在解决相关场景中依赖特征图像的准确性校准投影仪,并且最终梯形校准后的投影效果较差的技术问题。
2、为了实现上述目的,本公开实施例的第一方面,提供一种投影仪无感梯形校准方法,所述方法包括:
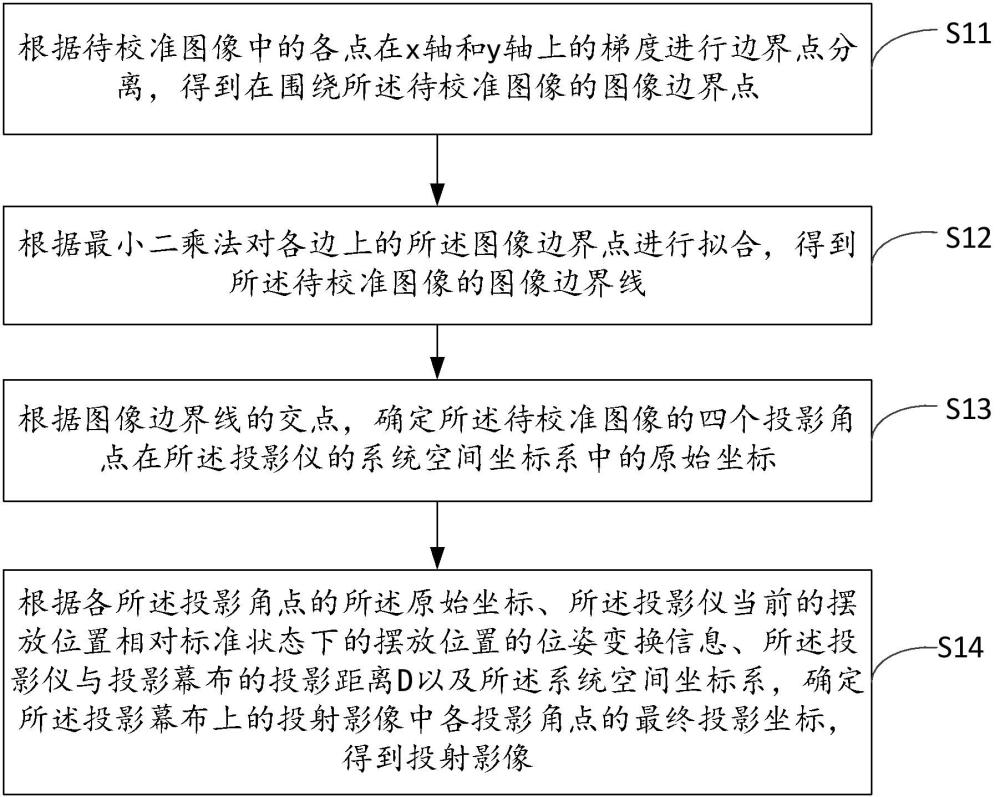
3、根据待校准图像中的各点在x轴和y轴上的梯度进行边界点分离,得到在围绕所述待校准图像的图像边界点;
4、根据最小二乘法对各边上的所述图像边界点进行拟合,得到所述待校准图像的图像边界线;
5、根据图像边界线的交点,确定所述待校准图像的四个投影角点在所述投影仪的系统空间坐标系中的原始坐标;
6、根据各所述投影角点的所述原始坐标、所述投影仪当前的摆放位置相对标准状态下的摆放位置的位姿变换信息、所述投影仪与投影幕布的投影距离d以及所述系统空间坐标系,确定所述投影幕布上的投射影像中各投影角点的最终投影坐标,得到投射影像。
7、在其中一种可能实现的方式中,所述根据待校准图像中的各点在x轴和y轴上的梯度进行边界点分离,得到在围绕所述待校准图像的图像边界点,包括:
8、确定待校准图像中的各点的亮度梯度;
9、根据所述待校准图像中相邻的点的亮度梯度,确定边界点,其中,所述边界点相邻的点中至少一个点的梯度与其他点的梯度不一致;
10、根据所述边界点进行分离,得到在围绕所述待校准图像的图像边界点。
11、在其中一种可能实现的方式中,所述确定待校准图像中的各点的亮度梯度,包括:
12、根据所述待校准图像中的各点在x轴上同y坐标的点的亮度,确定该点在x轴上的亮度梯度;
13、根据所述待校准图像中的各点在y轴上同x坐标的点的亮度,确定该点在y轴上的亮度梯度;
14、将所述待校准图像中的各点在x轴上的亮度梯度和在y轴上的亮度梯度之和确定为所述待校准图像中的各点的亮度梯度。
15、在其中一种可能实现的方式中,所述根据所述待校准图像中的各点在x轴上同y坐标的点的亮度,确定该点在x轴上的亮度梯度,包括:
16、根据所述待校准图像中的各点在x轴上左、右侧相邻的两个点的亮度,确定该点的第一亮度梯度;
17、根据所述待校准图像中的各点在x轴上右侧相邻的点的亮度以及在x轴上左侧相隔一个点位的点的亮度,确定该点的第二亮度梯度;
18、根据所述待校准图像中的各点在x轴上左、右侧均相隔两个点位的点的亮度,确定该点的第三亮度梯度。
19、将该点的第一亮度梯度、第二亮度梯度和第三亮度梯度之和确定为该点在x轴上的亮度梯度。
20、在其中一种可能实现的方式中,通过如下公式确定待校准图像中的点在x轴上的亮度梯度:
21、gx= gx1 + gx2 + gx3;
22、gx1 = f(x+1,y) – f(x-1,y);
23、gx2 = f(x+1,y) – f(x-2,y);
24、gx3 = f(x+3,y) – f(x-3,y);
25、其中,gx为待校准图像中任一点在x轴上的亮度梯度,gx1为待校准图像中任一点的第一亮度梯度,gx2为待校准图像中任一点的第二亮度梯度,gx3为待校准图像中任一点的第三亮度梯度,f(x+1,y)和f(x-1,y)为待校准图像中任一点在x轴上左右相邻的两个点的亮度,f(x-2,y)为待校准图像中任一点在x轴上左侧相隔一个点位的点的亮度,f(x+3,y)和f(x-3,y)为待校准图像中任一点在x轴上左、右侧均相隔两个点位的点的亮度。
26、在其中一种可能实现的方式中,所述根据所述待校准图像中的各点在y轴上同x坐标的点的亮度,确定该点在y轴上的亮度梯度,包括:
27、根据所述待校准图像中的各点在y轴上上、下端相邻的两个点的亮度,确定该点的第四亮度梯度;
28、根据所述待校准图像中的各点在y轴上上端、下端均相隔一个点位的点的亮度,确定该点的第五亮度梯度;
29、根据所述待校准图像中的各点在y轴上上端、下端均相隔两个点位的点的亮度,确定该点的第六亮度梯度;
30、将该点的第四亮度梯度、第五亮度梯度和第六亮度梯度之和确定为该点在y轴上的亮度梯度。
31、在其中一种可能实现的方式中,通过如下公式确定待校准图像中的点在y轴上的亮度梯度:
32、gy=gy1 + gy2 + gy3;
33、gy1 = f(x,y+1) – f(x,y-1);
34、gy2 = f(x,y+2) – f(x,y-2);
35、gy3 = f(x,y+3) – f(x,y-3);
36、其中,gy为待校准图像中任一点在y轴上的亮度梯度,gy1为待校准图像中任一点的第四亮度梯度,gy2为待校准图像中任一点的第五亮度梯度,gy3为待校准图像中任一点的第六亮度梯度,f(x,y+1)和f(x,y-1)为待校准图像中任一点在y轴上上端和下端相邻的两个点的亮度,f(x,y+2)和f(x,y-2)为待校准图像中任一点在y轴上上端、下端均相隔一个点位的点的亮度,f(x,y+3)和f(x,y-3)为待校准图像中任一点在y轴上上端、下端均相隔两个点位的点的亮度。
37、在其中一种可能实现的方式中,所述确定待校准图像中的各点的亮度梯度,包括:
38、根据所述待校准图像中的各点的亮度分别在x轴上和y轴上的偏导值,确定所述待校准图像中的各点在x轴和y轴上的亮度梯度。
39、本公开实施例的第二方面,提供一种投影仪无感梯形校准装置,所述装置包括:
40、分离模块,被配置为根据待校准图像中的各点在x轴和y轴上的梯度进行边界点分离,得到在围绕所述待校准图像的图像边界点;
41、拟合模块,被配置为根据最小二乘法对各边上的所述图像边界点进行拟合,得到所述待校准图像的图像边界线;
42、第一确定模块,被配置为根据图像边界线的交点,确定所述待校准图像的四个投影角点在所述投影仪的系统空间坐标系中的原始坐标;
43、第二确定模块,被配置为根据各所述投影角点的所述原始坐标、所述投影仪当前的摆放位置相对标准状态下的摆放位置的位姿变换信息、所述投影仪与投影幕布的投影距离d以及所述系统空间坐标系,确定所述投影幕布上的投射影像中各投影角点的最终投影坐标,得到投射影像。
44、本公开实施例的第三方面,提供一种投影仪,包括:
45、处理器;
46、用于存储处理器可执行指令的存储器;
47、其中,所述处理器被配置为执行所述存储器中存储的可执行指令,以执行第一方面中任一项所述的方法。
48、本发明提供了一种投影仪无感梯形校准方法、装置及投影仪。与现有技术相比具备以下有益效果:
49、根据待校准图像中的各点在x轴和y轴上的梯度进行边界点分离,得到在围绕待校准图像的图像边界点;根据最小二乘法对各边上的图像边界点进行拟合,得到待校准图像的图像边界线;根据图像边界线的交点,确定待校准图像的四个投影角点在投影仪的系统空间坐标系中的原始坐标;根据各投影角点的原始坐标、投影仪当前的摆放位置相对标准状态下的摆放位置的位姿变换信息、投影仪与投影幕布的投影距离d以及系统空间坐标系,确定投影幕布上的投射影像中各投影角点的最终投影坐标,得到投射影像。这种方式不依赖特征图像的准确性,并且最终梯形校准后的投影效果较好。
50、本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
- 还没有人留言评论。精彩留言会获得点赞!