一种用于遥感全息成像的移动式扫描系统及方法
本发明属于遥感,具体涉及一种用于遥感全息成像的移动式扫描系统及方法。
背景技术:
1、遥感技术被广泛地应用于地质勘探、农业监测、城市规划、环境保护等领域,高空间分辨率是高质量成像以及数据分析的前提,也是遥感技术发展中持续追求的一项重要的技术指标,但目前传统的遥感成像技术采用卫星或者飞机进行拍摄,由于成像设备和环境等因素的限制,导致遥感图像的分辨率和质量难以提高。
2、光学扫描全息(optical scanning holography,osh)是一种单像素成像的非相干全息技术,是由美国弗吉尼亚理工大学ting-chung poon教授等人提出的一种利用光电相结合方式的单像素成像非相干全息技术。该技术通过对物体的二维点对点扫描即可获取高分辨率的三维物体的全部数据信息。osh的优点在于可以实现高分辨率、大视场和高稳定性的三维物体全息图像的采集。
3、文献“three-dimensional remote sensing by optical scanning holography”从理论上和验证性实验上证明了osh在遥感技术上的应用前景,但未对扫描全息遥感拍摄物体系统做出整体系统设计以及整体的实现方法。
4、专利cn112947023b公开了一种光学扫描全息三维物体实时识别系统及方法。利用光学扫描全息在记录三维物体信息时对系统的稳定性要求较低,且记录的全息图信噪比高,能够实时记录三维物体的振幅和相位信息,能够提高三维物体的识别效率。但该方法仅适用于小体积物体的扫描识别。而且该发明所述系统需要空间光调制器对光学信息进行处理,因此光路系统更加复杂。
技术实现思路
1、针对上述现有技术的缺点,本发明提出一种用于遥感全息成像的移动式扫描系统。
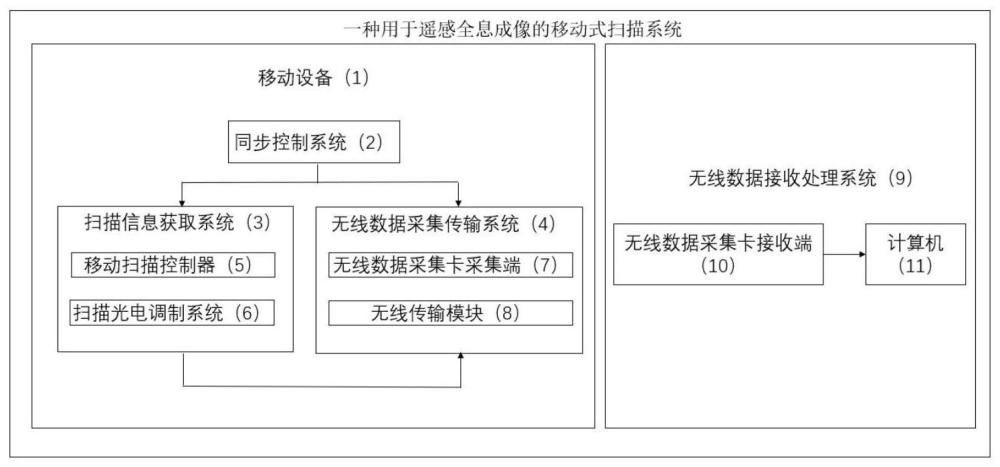
2、为实现上述目的,本发明采取的技术方案为:一种用于遥感全息成像的移动式扫描系统,包括:移动设备1、同步控制系统2、扫描信息获取系统3、无线数据采集传输系统4、无线数据接收处理系统9;
3、同步控制系统2分别与扫描信息获取系统3、无线数据采集传输系统4相连接,同步控制系统2控制扫描信息获取系统3获取光学信息和将其转化为电流信号,并且同步控制无线数据采集传输系统4将扫描信息获取系统3转化的电流信号进行采集传输至无线数据接收处理系统9;
4、扫描信息获取系统3包括移动扫描控制器5、扫描光电调制系统6;移动扫描控制器5与扫描光电调制系统6相连接,通过控制扫描移动控制器5实现遥感扫描,得到包含地面三维信息的反射光;扫描光电调制系统6及无线数据采集传输系统4搭载在移动设备1上;
5、扫描光电调制系统6沿着光路依次包括:激光器12、第一分束镜13分为两路,其中沿着反射光路依次包括第一声光移频器14、第一反射镜15、第一扩束镜16;沿着透射光路依次包括第二声光移频器17、第二反射镜18、第二扩束镜19、第一透镜20;之后,两光路在第二分束镜21汇聚之后在第二分束镜21两侧分别形成光束,其中一侧光束依次沿第三反射镜24、待扫描物体或景观、第二透镜25、第二光电探测器26、带通滤波器27;另一侧依次沿第一光阑22、第一光电探测器23;
6、带通滤波器27与锁相放大器28输入端相连,第一光电探测器23输出端与锁相放大器28参考信号端相连。
7、作为本发明的优选实施方案,所述无线数据采集传输系统4包括无线数据采集卡采集端7和无线传输模块8;无线数据采集卡采集端7分别与扫描光电调制系统6、无线传输模块8相连,将扫描信息获取系统3转化的电流信号进行采集,然后通过无线传输模块8传输至无线数据接收处理系统9。
8、作为本发明的优选实施方案,所述锁相放大器28与无线数据采集传输系统4相连。
9、作为本发明的优选实施方案,所述无线数据接收处理系统9接收来自无线数据采集传输系统4的数据,并进行数据处理,包括无线数据接收端10、计算机11;电流信号通过无线传输模块8传输至无线数据接收端10;计算机11通过无线数据接收端10实时观测电流信号获得待扫描物体或景观的二维全息图。
10、作为本发明的优选实施方案,所述移动设备1为车辆或飞行器;所述车辆为汽车、火车或无人驾驶车辆;飞行器为无人机或卫星。
11、作为本发明的优选实施方案,所述反射光路为时变平面波,所述透射光路为时变球面波,时变平面波和时变球面波同轴汇聚在第二分束镜21上。
12、本发明还要求保护所述用于遥感全息成像的移动式扫描方法,包括如下步骤:
13、(1)将扫描光电调制系统6固定至移动设备1,激光器12出射光束经第一分束镜13、第一声光移频器14、第一反射镜15、第一扩束镜16形成的时变平面波,与经第一分束镜13、第二声光移频器17、第二反射镜18、第二扩束镜19、第一透镜20后形成的时变球面波在第二分束镜21上合成同轴时变菲涅尔波带板;第二分束镜21其中一侧的时变菲涅尔波带板作为扫描光束,另一侧经第一光阑22得到单一差频变化的光斑,该光斑被第一光电探测器23接收并转化为差频电流信号由同轴电缆接入锁相放大器28参考信号端;
14、(2)扫描光束通过移动扫描控制器5对待成像的物体或景观进行三维扫描,得到携带有物体三维信息的反射光被第二透镜25汇聚至第二光电探测器26,第二光电探测器26将携带物体三维信息的光强度信息转化为电流信号,电流信号接入带通滤波器27后通过锁相放大器28滤除直流电流与非差频信号,得到差频电流信号;
15、(3)通过同步控制系统2控制无线数据采集传输系统4采集步骤(1)和(2)获得的差频电流信号,然后传输至无线数据接收处理系统9,实时观测差频电流信号,获得待扫描物体或景观的三维全息图;
16、(4)基于全息图再现程序,将获得的三维全息图进行再现以获得高分辨率三维遥感信息。
17、作为本发明的优选实施方案,所述步骤(1)中,时变平面波和时变球面波保持同轴汇聚。
18、作为本发明的优选实施方案,述步骤(2)中第二光电探测器26将携带物体三维信息的光强度信息转化为电流信号i0,与步骤(3)中的无线数据采集传输系统4采集步骤(1)和(2)的电流信号i0保持同步。
19、作为本发明的优选实施方案,所述步骤(1)中,同轴时变菲涅尔波带板的强度i为:
20、p=aexp[j(w0+ω1)t]
21、
22、i=|p+q|2
23、其中,p和q分别表示到达z0平面的平面波和球面波,a和b分别表示平面波和球面波的振幅,j为虚数单位,w0为激光器12发出激光的固有时间频率,ω1为第一声光移频器14的移频量,ω2为第二声光移频器17的移频量,ω2>ω1,t为时间变量,k0为波数,x和y表示波前平面的坐标,z0为球面波传播方向距离。
24、作为本发明的优选实施方案,所述步骤(2)中,电流信号i0的表达式为:
25、
26、其中,re[]表示取实部;d、h、w分别表示三维物体或景观的深度,长度和宽度;x′、y′表示时变菲涅尔波带板的空间位移量;γ(x,y;z)表示位于空间坐标(x,y;z)处物体或景观的强度反射率函数;符号表示相关运算,z表示光波传播方向,i(x,y;z)表示时变菲涅尔波带板的干涉条纹光强函数,i(x′,y′;z)表示待扫描物体或景观的复合光场,γ(x′+x,y′+y;z)表示扫描光束干涉条纹表达式。
27、作为本发明的优选实施方案,所述步骤(3)中,无线数据采集卡采集端7采集步骤(1)和(2)获得的差频电流信号iω为:
28、
29、其中,re[]表示取实部;(x,y;z)为空间坐标;q*表示q的共轭;符号表示相关运算。
30、与现有技术相比,本发明的有益效果为:
31、(1)本发明所述用于遥感全息成像的移动式扫描系统和方法能够远程采集、储存和传输数据,并实时在计算机上显示观测到的远程三维信息,同时进行扫描和采集数据,因此能够实时记录三维物体或景观的振幅和相位,实现高分辨率、高质量的三维成像。而且,本发明所述移动式扫描系统和方法不仅能够进行小体积物体的扫描识别,而且能够用于大体积物体识别及三维场景扫描。
32、(2)本发明采用光学扫描全息技术依赖于计算机进行干涉计算,相较于传统全息的记录再现过程,稳定性要求大幅度降低,对环境要求较低,且具有高稳定性。
33、(3)本发明所述装置光路上更加简化,紧凑的光学结构进一步提高了技术稳定性和整体性能,大大减小了环境不稳定对成像质量的影响,且将携带物体信息的光信号快速转化为电信号,降低了稳定性要求,加入了移动扫描控制器可实现移动扫描,在遥感成像中具有明显的优越性。
- 还没有人留言评论。精彩留言会获得点赞!