一种基于单快拍到达角和功率估计的车辆协作定位方法
本发明涉及车辆定位,尤其是涉及一种基于单快拍到达角和功率估计的车辆协作定位方法。
背景技术:
1、智能车辆定位在自动驾驶领域的研究中是一个十分重要的问题。高精度的定位技术不仅仅使智能汽车的跟踪变得方便,还能基于位置共享实现车与车(v2v)、车与路边基础设施(v2i)以及车与城市网络的互联,是实现智能交通的必由之路。尽管全球导航卫星系统(gnss)是现今使用最广泛、应用最成熟的定位技术,但具体到自动驾驶领域,依然存在卫星信号容易被复杂的周边环境所影响,从而导致定位失效,且基于gnss的定位更新频率低,不能满足在高速行驶下的车辆定位问题。
2、来波方向(direction of arrival,doa)估计技术具有高精度的定位性能,是声纳、雷达、电信等领域的一个重要应用,其目标是定位传播介质中的一个或多个辐射源。基于先进的传感器所构成的天线阵列使用doa估计技术进行车辆定位是目前研究智能车辆定位技术的主流方案之一。在这些方案中,基于单快拍doa的估计定位技术因其高精度,低复杂度的优势,能够对智能车辆进行高精度,实时性的定位而成为具有广泛应用价值的定位技术之一,对提高车辆定位技术的精度,速度有着至关重要的作用,并且可以在多种应用场景下弥补基于gnss定位技术的不足。
3、近年来,基于doa估计技术的车俩定位方法出现了一些代表性方案。如由ruizhang等人于2017年在文献《a vehicle positioning method based on joint toa anddoa estimationwith v2r communications》提出的基于v2r通信的toa和doa联合估计的车辆定位方法;由huafei wang等人于2019年在文献《assistant vehicle localizationbased on three collaborative base stations via sbl-based robust doaestimation》提出的一种在三个协同基站上基于sbl的鲁棒doa估计车辆定位技术。然而经过分析发现上述两种方案计算复杂度较高,需要一定的快拍数量保证定位的精准性,难以在实际运用中做到实时定位。
技术实现思路
1、本发明所要解决的技术问题是提供一种在单快拍场景应用下,计算复杂度低、定位精准度高、能实时定位,并且能保证车辆定位稳健性的基于单快拍到达角和功率估计的智能车辆定位方法。
2、本发明所采用的技术方案是,一种基于单快拍到达角和功率估计的车辆协作定位方法,该方法包括如下步骤:
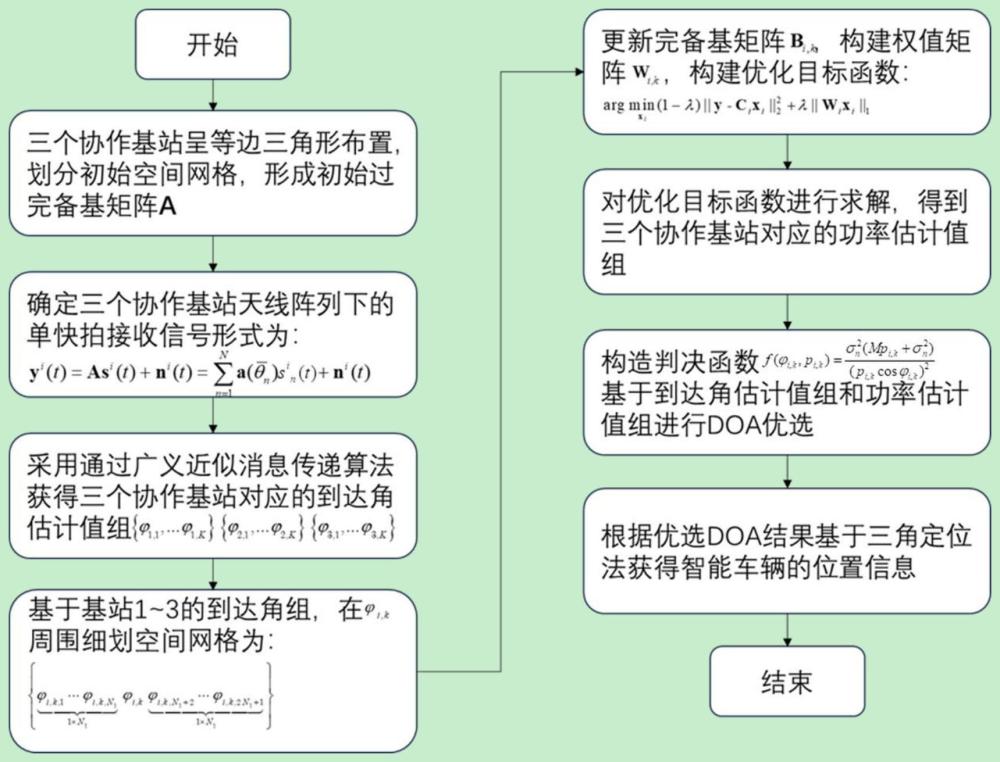
3、s1、将三个协作基站呈等边三角形布置,划分初始空间网格,基于初始空间网格形成初始过完备基矩阵a;设定k个车辆发射的定位信号均入射到三个协作基站的阵列上,得到三个协作基站的阵列的单快拍接收信号;
4、s2、基于所述初始过完备基矩阵a和单快拍接收信号,采用广义近似消息传递算法分别获得三个协作基站的到达角估计值,所述到达角估计值为k个车辆分别对应于各个协作基站的角度位置;
5、s3、在步骤s2得到的每个到达角估计值的周围细划空间网格,形成更新完备基矩阵bi,k及其对应的权值矩阵,其中,i=1,2,3,k=1,2,…,k,根据所述权值矩阵,采用加权l1范数最小化优化方法获得信号功率估计值;
6、s4、基于三个协作基站获得的信号功率估计值,构造判决函数,通过判决函数进行到达角优选,得到优选的到达角,基于优选的到达角,利用三角定位法完成车辆定位。
7、与现有技术相比,本发明的有益效果是:本发明方法基于gamp算法和l1范数最小化方法获得doa估计结果和信号功率估计结果,通过构造判决函数,从三个协作基站中筛选出估计效果较好的两个协作基站用于车辆定位,有效提高了doa估计、功率估计和配套智能车辆定位精度;并且本发明方法适用于未知定位信号概率分布的情况,通过标量估计函数获得低复杂度的doa估计,有效保障了智能车辆定位的实时性要求;本发明提供的方法在获得三个协作基站提供的doa估计结果后,通过辅助信息选取出优选doa估计结果后再进行车辆定位,有效避免了不稳定doa对车辆定位性能的影响。
8、作为优选,步骤s1的具体过程包括下列步骤:
9、s1.1、设三个协作基站的坐标分别为(0,0)m、(d,0)m和(d/2,)m,m表示米,将空间角度范围[-90°,90°]均匀划为n个网格基于n个网格形成初始过完备基矩阵其中,其中,n=1,2,...,n,m表示m个等间距阵元天线阵列,λ和d分别表示载波波长和阵元间距;
10、s1.2、设定k个车辆发射的定位信号均入射到三个协作基站的阵列上,经过模数采样后,获得三个协作基站的阵列的单快拍接收信号,第i个协作基站的阵列的单快拍阵列接收信号yi(t)表示为:
11、
12、其中,表示k稀疏的信号向量,ni(t)表示高斯白噪声向量,t表示采样时刻。
13、作为优选,步骤s3的具体过程包括下列步骤:
14、s3.1、设定由步骤s2获得的三个协作基站的到达角估计值分别表示为:其中,i=1,2,3,在每个周围细划空间网格,则分别在周围细划出的空间网格表示为:根据所述的细划出的空间网格,形成针对三个协作基站的阵列天线的更新完备基矩阵bi,k,其中,i=1,2,3,k=1,2,…,k,所述更新完备基矩阵bi,k的具体表达式为:
15、
16、s3.2、构建权值矩阵wi,k,其具体表达式为:
17、s3.3、基于步骤s3.2得到的权值矩阵wi,k构建优化目标函数:
18、其中,ci=[bi,1,...bi,k],λ表示平衡稀疏度与精度的参数,通过求解所述优化目标函数来得到三个协作基站对应的功率估计值。
19、作为优选,步骤s4的具体过程包括下列步骤:
20、s4.1、针对第k台车辆发射的定位信号,设定步骤s2获得的波达角估计值为步骤s3.3获得的功率估计值为pi,k,构造判决函数其中为噪声功率,
21、s4.2、将步骤s2获得的到达角估计值和s3.3获得的功率估计值分别代入所述判决函数中,分别得到三个基站关于k个到达角的判决值大小;根据得到的判决值,若三个判决值中任意两个判决值的大小不一致,则选取判决值较小的两个基站的到达角作为优选到达角,并用于车辆定位,若三个判决值的大小一致,则随机挑选其中两个基站的到达角作为优选到达角,并用于车辆定位;
22、s4.3、设步骤s4.2得到的优选到达角为ωk,βk,若对应的优选基站的坐标分别为(d/2,)m、(0,0)m,则相应车辆坐标(lx,ly)为:
23、
24、若对应优选基站的坐标为(0,0)m、(d,0)m,则相应车辆坐标(lx,ly)为:
25、
26、若对应优选基站的坐标为(d/2,)m、(d,0)m,则相应车辆坐标(lx,ly)为:
27、
- 还没有人留言评论。精彩留言会获得点赞!