一种载波频率偏移追踪方法及装置
本技术涉及无线通信,具体而言,涉及一种载波频率偏移追踪方法及装置。
背景技术:
1、wi-fi感知能力高度依赖于信道状态信息(channel state information,csi)测量的精度,但由tx与rx的本地晶振(local oscillator,lo)频率差异产生的载波频率偏移(carrier frequency offset,cfo)会给csi带来累积相位误差。另外,lo对温度变化较为敏感,设备长时间的运行会使设备内部温度升高,导致cfo产生漂移,从而给csi带来更多的相位误差。因此,cfo给基于csi相位的感知技术发展带来严重影响,阻碍了无线相位同步、wi-fi相控阵、wi-fi成像等新一代wi-fi技术的发展。
2、在现有技术中有多种估计载波频偏(cfo)的方法,例如一种基于自相关运算的ofdm系统载波频偏估计方法能够有效地降低计算复杂度,同时经过仿真验证,改进后的算法表现良好。还有一种基于导频的载波频偏估计方法在保持估计精度的前提下扩大估计范围,虽然上述的方法均有效估计了cfo,但是第一种方法对噪声敏感,且自相关函数的计算量较大,第二种方法对导频的选择和发送有较为严格的要求,在高速移动的通信系统中,如果导频的发送周期太长,频偏的累积误差可能会很大;如果导频的发送周期太短,导频序列的长度可能不足以支持准确的频偏估计。
3、由于现有技术的方法的局限性使其难以应用于广泛的wi-fi感知实践,更重要的是,wi-fi感知需要长期稳定的cfo追踪才可以对其进行精确校准,短期的cfo估计无法满足wi-fi感知的需求。因此,如何使得cfo长期追踪估计技术的鲁棒性高、计算开销低成为本领域技术人员研究的方向之一。
技术实现思路
1、本技术的目的在于,为了克服现有的技术缺陷,提供了一种载波频率偏移追踪方法及装置,通过结合谱估计算法、多重信号分类算法、卡尔曼滤波器对cfo动态追踪,具有一定的鲁棒性。
2、本技术目的通过下述技术方案来实现:
3、第一方面,本技术提出了一种载波频率偏移追踪方法,所述方法应用于接收端,包括:
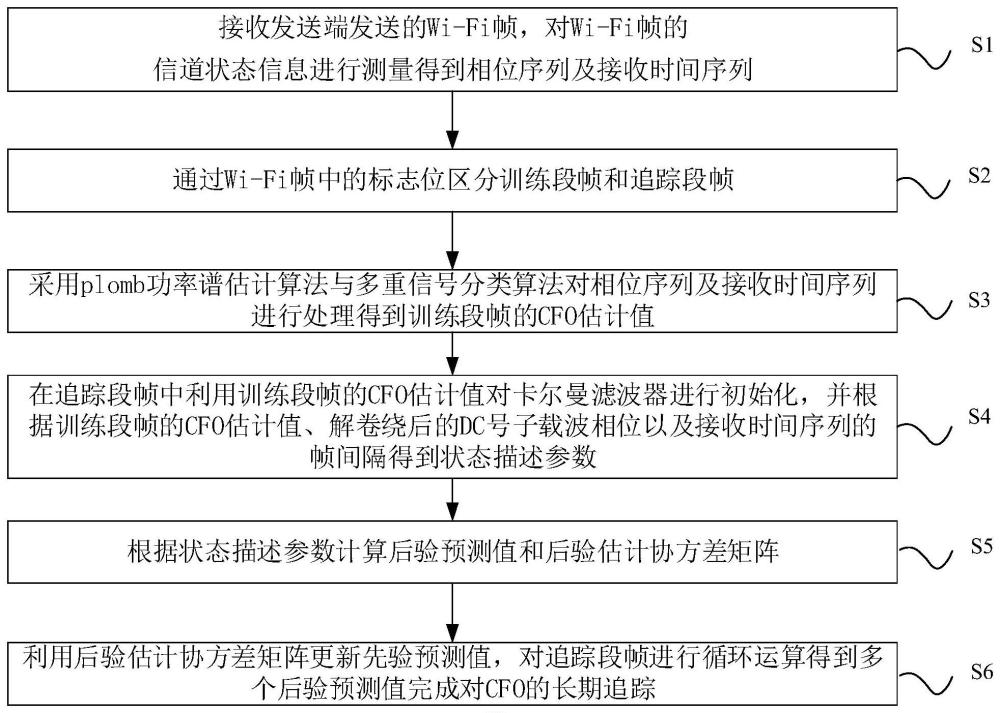
4、接收发送端发送的wi-fi帧,对所述wi-fi帧的信道状态信息进行测量得到相位序列及接收时间序列;
5、通过wi-fi帧中的标志位区分训练段帧和追踪段帧;
6、采用plomb功率谱估计算法与多重信号分类算法对相位序列及接收时间序列进行处理得到训练段帧的cfo估计值;
7、在追踪段帧中利用训练段帧的cfo估计值对卡尔曼滤波器进行初始化,并根据训练段帧的cfo估计值、解卷绕后的dc号子载波相位以及接收时间序列的帧间隔得到状态描述参数,解卷绕后的dc号子载波相位为将相位序列中的相位差补偿至预测相位形成的;
8、根据状态描述参数计算后验预测值和后验估计协方差矩阵;
9、利用后验估计协方差矩阵更新先验预测协方差矩阵,对追踪段帧进行循环运算得到多个后验预测值完成对cfo的长期追踪。
10、在一种可能的实施方式中,在追踪段帧中利用训练段帧的cfo估计值对卡尔曼滤波器进行初始化,并根据训练段帧的cfo估计值、解卷绕后的dc号子载波相位以及接收时间序列的帧间隔得到状态描述参数的步骤,包括:
11、在追踪段帧利用训练段帧的cfo估计值对卡尔曼滤波器的过程噪声和观测噪声进行初始化;
12、根据训练段帧的cfo估计值、解卷绕后的dc号子载波相位以及接收时间序列的帧间隔计算出k-1时刻帧的状态描述参数xk-1:
13、
14、其中,表示cfo变化率,表示当前cfo,δcfo表示当前cfo在帧间隔δt内的累积相位。
15、在一种可能的实施方式中,根据状态描述参数计算后验预测值和后验估计协方差矩阵;
16、基于状态描述参数计算当前时刻的先验预测协方差矩阵
17、将先验预测协方差矩阵结合解卷绕后的dc号子载波相位计算当前相位值;
18、根据当前时刻的先验预测协方差矩阵、观测噪声和观测矩阵计算卡尔曼增益;
19、根据当前相位值、观测矩阵和下一时刻k的先验预测值计算残差值;
20、利用残差值计算后验预测值;
21、利用卡尔曼增益、观测矩阵以及后验预测协方差矩阵计算后验估计协方差矩阵。
22、在一种可能的实施方式中,基于状态描述参数计算当前时刻的先验预测协方差矩阵的步骤,包括:
23、通过状态描述参数构建状态转移矩阵;
24、通过状态转移矩阵和状态描述参数得到下一时刻k的先验预测值;
25、使用上一时刻k-1的后验预测协方差矩阵来计算当前时刻的先验预测协方差矩阵。
26、在一种可能的实施方式中,根据状态描述参数,结合解卷绕后的dc号子载波相位计算当前相位值的步骤,包括:
27、计算下一时刻k的先验预测值的分量和解卷绕后的dc号子载波相位在复数空间上的预测残差;
28、将预测残差与下一时刻k的先验预测值的分量求和得到当前相位值。
29、在一种可能的实施方式中,利用残差值计算后验预测值的步骤,包括:
30、利用卡尔曼增益对残差值进行校正得到校正后的残差值;
31、将到校正后的残差值与下一时刻k的先验预测值进行加和得到后验预测值。
32、第二方面,本技术提出了一种载波频率偏移追踪装置,所述装置包括:
33、测量模块,用于接收发送端发送的wi-fi帧,对所述wi-fi帧的信道状态信息进行测量得到相位序列及接收时间序列;
34、帧划分模块,用于通过wi-fi帧中的标志位区分训练段帧和追踪段帧;
35、数据处理模块,用于采用plomb功率谱估计算法与多重信号分类算法对相位序列及接收时间序列进行处理得到训练段帧的cfo估计值;
36、初始化模块,用于在追踪段帧中利用训练段帧的cfo估计值对卡尔曼滤波器进行初始化,并根据训练段帧的cfo估计值、解卷绕后的dc号子载波相位以及接收时间序列的帧间隔得到状态描述参数,解卷绕后的dc号子载波相位为将相位序列中的相位差补偿至预测相位形成的;
37、计算模块,用于根据状态描述参数计算后验预测值和后验估计协方差矩阵;
38、输出模块,用于利用后验估计协方差矩阵更新先验预测协方差矩阵,对追踪段帧进行循环运算得到多个后验预测值完成对cfo的长期追踪。
39、在一种可能的实施方式中,所述初始化模块,还用于:
40、在追踪段帧利用训练段帧的cfo估计值对卡尔曼滤波器的过程噪声和观测噪声进行初始化;
41、根据训练段帧的cfo估计值、解卷绕后的dc号子载波相位以及接收时间序列的帧间隔计算出k-1时刻帧的状态描述参数xk-1:
42、
43、其中,表示cfo变化率,表示当前cfo,δcfo表示当前cfo在帧间隔δt内的累积相位。
44、第三方面,本技术还提出了一种计算机设备,所述计算机设备包括处理器和存储器,所述存储器中存储有计算机程序,所述计算机程序由所述处理器加载并执行以实现如第一方面任一项所述的载波频率偏移追踪方法。
45、第四方面,本技术还提出了一种计算机可读存储介质,所述存储介质中存储有计算机程序,所述计算机程序由处理器加载并执行以实现如第一方面任一项所述的载波频率偏移追踪方法。
46、上述本技术主方案及其各进一步选择方案可以自由组合以形成多个方案,均为本技术可采用并要求保护的方案;且本技术,(各非冲突选择)选择之间以及和其他选择之间也可以自由组合。本领域技术人员在了解本技术方案后根据现有技术和公知常识可明了有多种组合,均为本技术所要保护的技术方案,在此不做穷举。
47、本技术的有益效果在于:
48、第一、通过tx非均匀发送技术,克服了相位模糊的问题。
49、第二、能够根据系统模型和观测数据,通过融合历史信息和新观测值,提供准确的cfo估计结果。
50、第三、能够实时处理新的观测数据,并根据先前的状态估计结果进行更新,适用于需要快速反应的通信系统。
51、第四、具有较低的计算和存储需求,可根据系统的动态性质,有效地使用历史信息进行状态估计。
52、第五、对于噪声和不确定性具有一定的鲁棒性,能将观测噪声和系统模型的不确定性考虑在内,对估计结果进行优化。
- 还没有人留言评论。精彩留言会获得点赞!