摄像机纠偏方法及装置与流程
本发明涉及相机纠偏,特别是涉及摄像机纠偏方法及装置。
背景技术:
1、在工业场景中使用摄像机作为监控设备已经非常常见,这些摄像机通常被布置在生产线、仓库、车间等地方,用于实时监测生产过程、物料运输以及设备运行状态。然而,在摄像机长时间的运行过程中,由于地面震动、地面沉降等因素,导致摄像机的位姿会发生轻微偏移或者不一致的情况,这将影响监控系统的正常运转。若通过人工的方式来对摄像机进行预置位纠偏,将浪费太多人力资源,很不值得。
2、此外,目前的摄像机自动纠偏技术仅适用于支持云台的摄像机,在摄像机位姿发生偏移的情况下,需要对摄像机位姿的偏移量进行计算,并通过云台对摄像机位姿进行调整实现纠偏,并未给出对不支持云台的摄像机进行纠偏的方案。
技术实现思路
1、本发明实施例的目的在于提供一种摄像机纠偏方法及装置,以实现在摄像机支持或不支持通过云台进行位姿调整的情况下,均能够实现对摄像机的纠偏。具体技术方案如下:
2、第一方面,本发明实施例提供了一种摄像机纠偏方法,该方法包括:
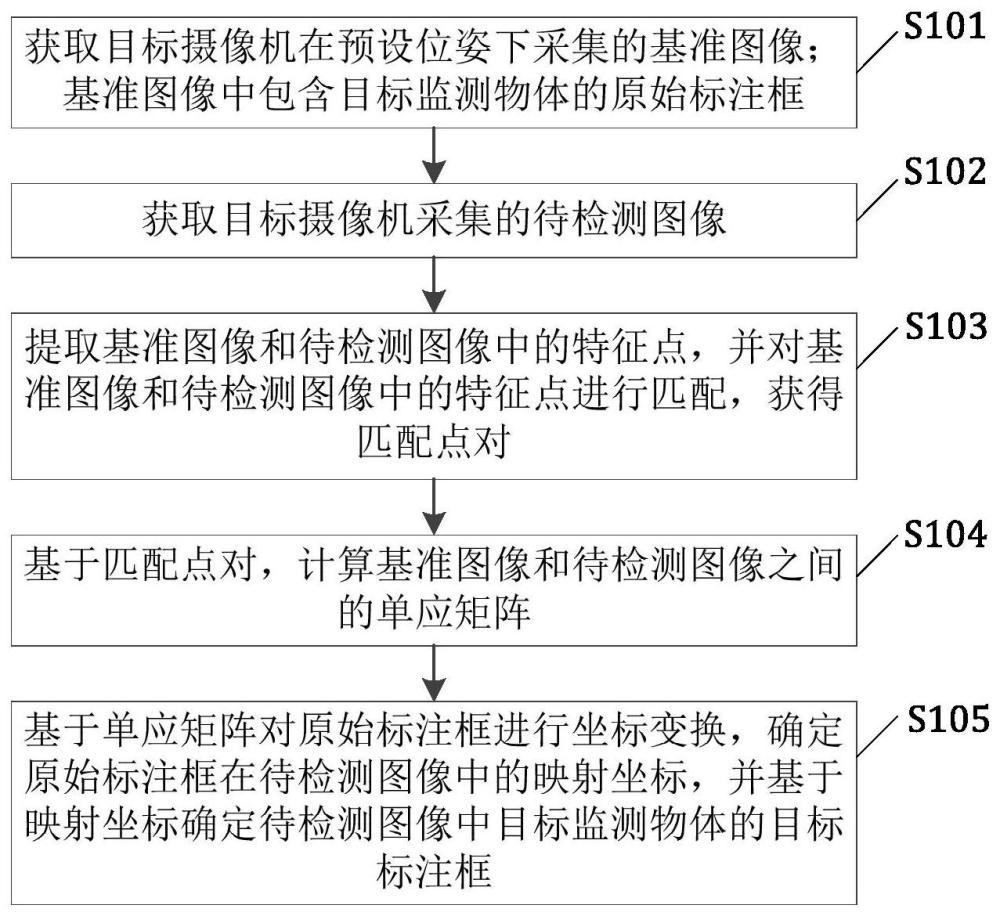
3、获取目标摄像机在预设位姿下采集的基准图像;所述基准图像中包含目标监测物体的原始标注框;
4、获取所述目标摄像机采集的待检测图像;
5、提取所述基准图像和所述待检测图像中的特征点,并对所述基准图像和所述待检测图像中的特征点进行匹配,获得匹配点对;
6、基于所述匹配点对,计算所述基准图像和所述待检测图像之间的单应矩阵;
7、基于所述单应矩阵对所述原始标注框进行坐标变换,确定所述原始标注框在所述待检测图像中的映射坐标,并基于所述映射坐标确定所述待检测图像中所述目标监测物体的目标标注框。
8、可选的,所述目标摄像机为搭载在可控云台上的摄像机,所述获取目标摄像机在预设位姿下采集的基准图像,包括:
9、获取所述目标摄像机在所述预设位姿下通过依次递增的n个预设焦距采集的基准图像;其中,第i个预设焦距对应第i个基准图像,且第i个基准图像中包含所述目标监测物体的原始标注框;
10、所述获取所述目标摄像机采集的待检测图像的步骤,包括:
11、获取所述目标摄像机基于第i个预设焦距采集的第i个待检测图像;
12、所述提取所述基准图像和所述待检测图像中的特征点,并对所述基准图像和所述待检测图像中的特征点进行匹配,获得匹配点对的步骤,包括:
13、提取所述目标摄像机基于第i个预设焦距采集的基准图像和待检测图像中的特征点,并对第i个预设焦距对应的所述基准图像和所述待检测图像进行特征点匹配,获取第i个预设焦距对应的匹配点对;
14、所述基于所述匹配点对,计算所述基准图像和所述待检测图像之间的单应矩阵的步骤,包括:
15、基于第i个预设焦距对应的匹配点对,计算第i个预设焦距对应的所述基准图像和所述待检测图像之间的单应矩阵;
16、所述基于所述单应矩阵对所述第一标注框进行坐标变换,确定所述第一标注框在所述待检测图像中的映射坐标,并基于所述映射坐标确定所述待检测图像中目标监测物体的目标标注框的步骤,包括:
17、基于第i个预设焦距对应的单应矩阵对第i个原始标注框进行坐标变换,确定第i个原始标注框在所述第i个待检测图像中的映射坐标,并基于所述映射坐标确定第i个待检测图像中目标监测物体的目标标注框;
18、所述方法还包括:
19、根据第i个基准图像中的原始标注框和对应的目标标注框,计算所述目标摄像机基于第i个焦距采集的所述待检测图像相对于所述基准图像的偏移量,基于所述偏移量对所述目标摄像机进行位姿纠偏,并返回获取所述目标摄像机基于第i+1个预设焦距采集的第i+1个待检测图像的步骤,直到基于第n个预设焦距对应的偏移量对所述目标摄像机完成位姿纠偏。
20、可选的,所述获取待纠偏相机在预设位姿下采集的基准图像之后,还包括:
21、对所述基准图像进行去畸变处理;
22、所述获取所述待纠偏相机当前采集的待检测图像之后,还包括:
23、对所述待检测图像进行去畸变处理。
24、可选的,基于如下方式对所述基准图像和/或所述待检测图像进行去畸变处理:
25、基于针对所述目标摄像机预先确定的径向畸变多项式,调整所述基准图像和/或所述待检测图像中的像素点的径向坐标,获得去畸变后的所述基准图像和/或所述待检测图像;所述径向畸变多项式表征像素点在无畸变图像和畸变后图像中的径向坐标之间的对应关系;
26、所述径向畸变多项式为:
27、rdistorted=a*r4+b*r3+c*r2+d*r
28、其中,rdistorted为像素点在畸变后图像中的径向坐标,r为像素点在无畸变图像中的径向坐标,a,b,c和d为针对所述目标摄像机预先确定的畸变系数。
29、第二方面,本发明实施例提供了一种摄像机纠偏装置,包括:
30、第一获取模块,用于获取目标摄像机在预设位姿下采集的基准图像;所述基准图像中包含目标监测物体的原始标注框;
31、第二获取模块,用于获取所述目标摄像机采集的待检测图像;
32、匹配模块,用于提取所述基准图像和所述待检测图像中的特征点,并对所述基准图像和所述待检测图像中的特征点进行匹配,获得匹配点对;
33、计算模块,用于基于所述匹配点对,计算所述基准图像和所述待检测图像之间的单应矩阵;
34、确定模块,用于基于所述单应矩阵对所述原始标注框进行坐标变换,确定所述原始标注框在所述待检测图像中的映射坐标,并基于所述映射坐标确定所述待检测图像中所述目标监测物体的目标标注框。
35、可选的,所述第一获取模块,具体用于:
36、获取所述目标摄像机在所述预设位姿下通过依次递增的n个预设焦距采集的基准图像;其中,第i个预设焦距对应第i个基准图像,且第i个基准图像中包含所述目标监测物体的原始标注框;
37、所述第二获取模块,具体用于:
38、获取所述目标摄像机基于第i个预设焦距采集的第i个待检测图像;
39、所述匹配模块,具体用于:
40、提取所述目标摄像机基于第i个预设焦距采集的基准图像和待检测图像中的特征点,并对第i个预设焦距对应的所述基准图像和所述待检测图像进行特征点匹配,获取第i个预设焦距对应的匹配点对;
41、所述计算模块,具体用于:
42、基于第i个预设焦距对应的匹配点对,计算第i个预设焦距对应的所述基准图像和所述待检测图像之间的单应矩阵;
43、所述确定模块,具体用于:
44、基于第i个预设焦距对应的单应矩阵对第i个原始标注框进行坐标变换,确定第i个原始标注框在所述第i个待检测图像中的映射坐标,并基于所述映射坐标确定第i个待检测图像中目标监测物体的目标标注框;
45、所述装置还包括:
46、纠偏模块,用于根据第i个基准图像中的原始标注框和对应的目标标注框,计算所述目标摄像机基于第i个焦距采集的所述待检测图像相对于所述基准图像的偏移量,基于所述偏移量对所述目标摄像机进行位姿纠偏,并指示所述第二获取模块获取所述目标摄像机基于第i+1个预设焦距采集的第i+1个待检测图像,直到基于第n个预设焦距对应的偏移量对所述目标摄像机完成位姿纠偏。
47、可选的,所述装置还包括:
48、第一去畸变模块,用于对所述基准图像进行去畸变处理;
49、第二去畸变模块,用于对所述待检测图像进行去畸变处理。
50、可选的,所述第一去畸变模块和/或所述第二去畸变模块基于如下方式对所述基准图像和/或所述待检测图像进行去畸变处理:
51、基于针对所述目标摄像机预先确定的径向畸变多项式,调整所述基准图像和/或所述待检测图像中的像素点的径向坐标,获得去畸变后的所述基准图像和/或所述待检测图像;所述径向畸变多项式表征像素点在无畸变图像和畸变后图像中的径向坐标之间的对应关系;
52、所述径向畸变多项式为:
53、rdistorted=a*r4+b*r3+c*r2+d*r
54、其中,rdistorted为像素点在畸变后图像中的径向坐标,r为像素点在无畸变图像中的径向坐标,a,b,c和d为针对所述目标摄像机预先确定的畸变系数。
55、第三方面,本发明实施例提供了一种电子设备,包括处理器、通信接口、存储器和通信总线,其中,处理器,通信接口,存储器通过通信总线完成相互间的通信;
56、存储器,用于存放计算机程序;
57、处理器,用于执行存储器上所存放的程序时,实现上述任一项的摄像机纠偏方法。
58、本发明实施例还提供了一种包含指令的计算机程序产品,当其在计算机上运行时,使得计算机执行上述任一所述的摄像机纠偏方法。
59、本发明实施例有益效果:
60、本发明实施例提供的摄像机纠偏方法及装置,通过目标摄像机采集的基准图像和待检测图像之间的匹配点对,计算基准图像和待检测图像之间的单应矩阵,并基于单应矩阵对基准图像中目标监测物体的原始标准框进行坐标变换,确定出的待检测图像中的目标标注框能够在目标摄像机发生位姿偏移的情况下实现对目标监测物体的标注,从而在监控场景中,可以基于目标标注框的坐标对图像中的目标监测物体进行监控,避免监控效果受到图像中心非目标监测物体的干扰,提升目标摄像机的监控效果,实现了在目标摄像机发生位姿偏移的情况下,对在目标摄像机采集到的图像中所关注的监测目标进行纠偏。
61、因此,本发明实施例提供的摄像机纠偏方法不需要通过云台对目标摄像机的位姿作出调整就可以实现纠偏效果,从而在摄像机支持或者不支持通过云台进行位姿调整的情况下,均能够实现对摄像机的纠偏,适用范围较广。
62、当然,实施本发明的任一产品或方法并不一定需要同时达到以上所述的所有优点。
- 还没有人留言评论。精彩留言会获得点赞!