一种网联车系统的状态反馈安全同步控制方法
本发明属于自动化技术与现代控制领域,涉及一种网联车系统的状态反馈安全同步控制方法。
背景技术:
1、网联车系统是解决智能交通系统所面临的交通挤塞和安全等问题最有希望的解决方案之一。网联车系统可以看作是车辆复杂信息物理网络,其中每个联网车辆节点通过无线通信网络与相邻联网车辆节点交换信息。然而,无线通信网络中开放的通信协议为攻击者提供了可乘之机。为了提高网联车系统的安全性和可靠性,切实保护人民群众的生命财产安全,亟需研究和开发更为先进的安全同步控制策略。网联车系统安全同步控制与智能交通的发展息息相关。因此,网联车系统安全同步控制技术已成为工业自动化的一个重要部分,在自动控制领域有着不可替代的位置。
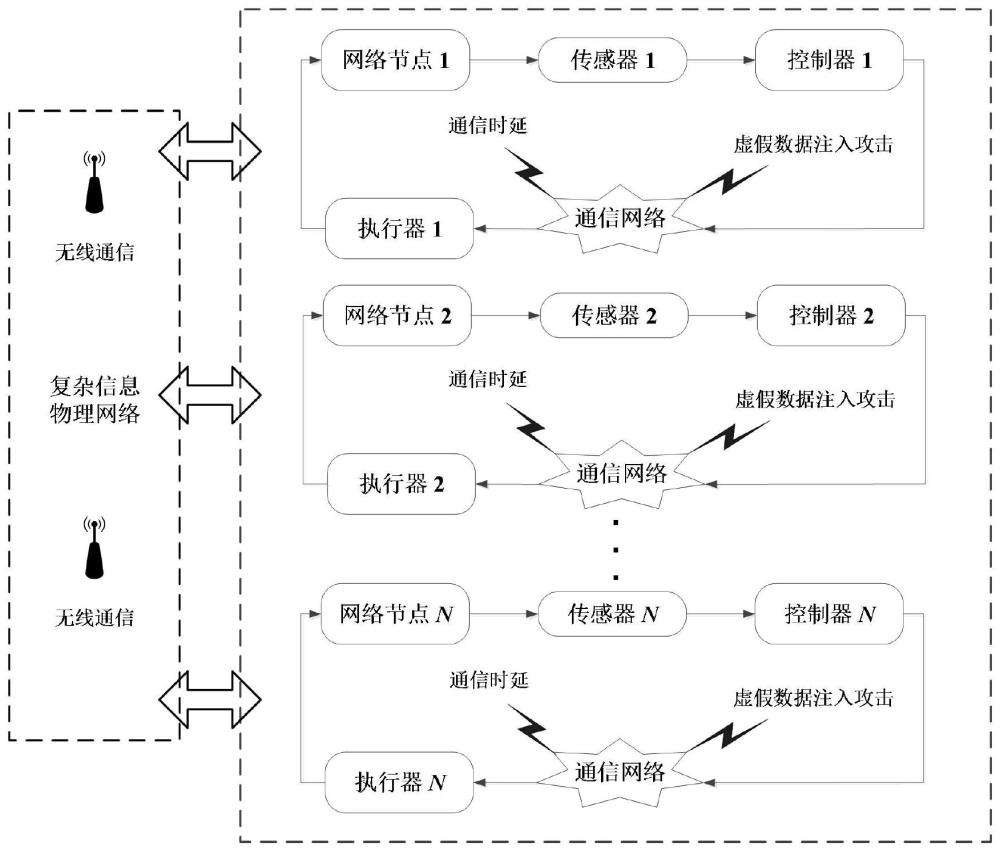
2、网联车系统是以自动驾驶为主要特征的新一代智能交通系统,具有分布并行感知、计算和执行能力,更好的容错性、鲁棒性,以及更高的经济可承受性,有助于解决实际智能交通的发展与建设中许多技术挑战。在网联车系统中,考虑网联车系统中的网联车流量(见图1)。考虑到网联车系统每个网联车辆节点通过无线通信网络与相邻网联车辆节点交换信息,上述网联车系统可以用复杂信息物理网络来刻画。在网联车系统实际运行过程中,要求车辆节点之间的信息交换具有较高的实时性、稳定性以及安全性,以确保网联车辆自动驾驶的需求。传统的单一集成平台的集中控制策略已不足以应对当前时代的多车互联。为了解决这一问题,本发明采用了基于状态反馈的同步控制器。基于状态反馈的同步控制器就是通过可得到的系统状态信息设计反馈法则实现同步控制目标。另一方面,在万物互联的时代背景下,由于系统中无线通信网络的复杂耦合和通信协议的开放性,网联车系统的安全面临各种各样的威胁与挑战:不仅依然需要面临通信时延、数据丢包等传统威胁,同时也需要面对近年来出现日益增多的恶意网络攻击等新的安全问题。由于虚假数据注入攻击具有隐蔽性的模式特征,因此,将虚假数据注入攻击建模为具有能量约束的非线性特殊扰动更符合实际。此外,考虑到大量网联车辆节点之间数据的并行传输以及无线通信网络的复杂耦合造成的时延现象,引入无限分布式时延和快变输入时延将网联车系统转化为时延系统。同时,针对上述虚假数据注入攻击和混合时延问题,提出一种便于实施且有效的基于状态反馈的安全同步控制器。
3、针对上述问题,本发明利用现代控制理论技术建立虚假数据注入攻击下时延网联车系统的状态空间模型,为网联车系统设计了基于状态反馈的安全同步控制策略,并分析其稳定性,使网联车系统安全同步运行。综上,设计一种基于时延复杂信息物理网络建模的网联车系统和针对虚假数据注入攻击的状态反馈安全同步控制方法具有重要的科研意义和实际应用意义。
技术实现思路
1、本文的目的是针对智能交通系统中多辆网联车需要同步控制的问题,利用网联车辆节点的互联性对网联车系统进行研究,提供了一种基于复杂信息物理网络建模的网联车系统的状态反馈安全同步控制方法。
2、本发明方法的具体步骤包括如下:
3、一种网联车系统的状态反馈安全同步控制方法,包括如下步骤:
4、步骤1,获取网联车系统中网联车的数据信息,并基于所有网联车的数据信息建立虚假数据注入攻击下网联车系统的时延复杂信息物理网络状态空间模型;
5、步骤2,针对单个网联车,建立网联车系统的孤立网联车辆节点的状态空间模型;
6、步骤3,构建网联车系统的状态反馈安全同步控制方法的同步误差;
7、步骤4,引入多胞体模型与线性矩阵不等式技术;
8、步骤5,引入网联车系统安全同步指标;
9、步骤6,设计网联车系统安全同步的条件;
10、步骤7,网联车系统的安全同步验证过程。
11、优选地,步骤1中虚假数据注入攻击下网联车系统的时延复杂信息物理网络状态空间模型构造,构造形式如下:
12、
13、x(θ)=φi(θ),θ∈(-∞,0],i=1,2,...,n,
14、其中,i=1,2,...,n表示网联车系统中网联车辆节点的个数;表示k时刻网联车系统中第i辆网联车辆的状态;是可控制的第i辆网联车辆的控制输入;表示网联车系统状态的初始条件;表示网联车系统中发生的无限分布时延现象;γ表示网联车系统的内耦合配置矩阵;是网联车系统的外耦合配置矩阵,且满足和表示受到无限分布式时延影响的第i辆网联车辆遭受的虚假数据注入攻击干扰,满足ft(ui(k-τk))f[f(ui(k-τk))-ui(k-τk)]≤0,其中,τk表示时变时延,满足τm≤τk≤τm,且为正整数;是系统矩阵,表示n维列向量,表示n×n维常数矩阵。
15、优选地,步骤2中网联车系统的孤立网联车辆节点的状态空间模型构造,构造形式如下:
16、
17、s(θ)=φ(θ),θ∈(-∞,0],
18、其中,表示k时刻孤立联网车辆节点的状态;表示孤立联网车辆节点状态的初始条件。
19、优选地,步骤3中构建网联车系统的同步误差,构建形式如下:
20、
21、其中,ei(k)=xi(k)-s(k),表示克罗内克积。
22、优选地,步骤4中引入多胞体模型与线性矩阵不等式技术,其形式如下:
23、步骤4.1,对于整数v≥1,使得|z||∞≤1,其中,将集合ev中的元素定义为ei(i∈[1,2v]),其中ev是对角元素为“1”或“0”的v×v对角矩阵,则fv具有以下形式
24、
25、并对于任意有其中,“co”表示凸集合,iv是v维单位矩阵,z(k)是建立多胞体模型所需的方程;
26、步骤4.2,对于若μi≥0,λj≥0,(i,j=1,2,···),则有
27、
28、
29、步骤4.3,若则对于τm≥1和集合中的时间变量e,有
30、
31、其中,g(i)=e(i+1)-e(i),π0=e(k)-e(k-τm),和
32、步骤4.4,若则对于和任意a∈(0,1),有
33、
34、步骤4.5,假设有
35、
36、其中,整数v≥1,
37、步骤4.6,假设对于任意的z(k)都满足
38、
39、步骤4.7,根据步骤4.1,不难得出
40、
41、其中,y∈[1,2v],表示对角矩阵,其中对角元素为“1”或“0”,
42、步骤4.8,根据步骤4.5、4.7,可得如下形式的网联车系统闭环同步误差:
43、
44、优选地,步骤5中引入网联车系统安全同步指标,其形式如下:
45、设计常数0<π<1,0<λ1≤1,λ2>1,使得
46、
47、其中,v2(0)为初始时刻李亚普诺夫函数;v1(k)为k时刻李亚普诺夫函数,则网联车系统安全同步。
48、优选地,步骤6中设计网联车系统安全同步的条件,其设计形式如下:
49、设计常数π>0,λ1≤1,λ2>1,τk,δi≠0,(i=1,2,3),矩阵和集合使得
50、
51、
52、
53、
54、
55、
56、
57、且所设计的状态反馈安全同步控制器增益为
58、k=yx-t,
59、其中,
60、
61、
62、
63、
64、
65、
66、
67、
68、
69、
70、那么,对于网联车系统任意初始条件,李雅普诺夫函数v2(k)都满足v2(0)≤1,则网联车系统安全同步。
71、优选地,步骤7中网联车系统的安全同步验证过程如下:
72、步骤7.1,对于任意初始步骤下的网联车系统,选择如下形式的李亚普诺夫函数:
73、
74、其中,
75、
76、pβ>0,qβ>0,sβ1>0,sβ2>0,rβ1>0,rβ2>0,zβ>0,0<λ1≤1,λ2>1,β=1,2,g(k)=e(k+1)-e(k),
77、步骤7.2,根据步骤4.2,可得如下形式的李雅普诺夫函数的前向差分:
78、
79、其中,
80、
81、步骤7.3,已知并根据步骤4.3、4.4、7.2,得出
82、
83、其中,
84、
85、
86、
87、
88、
89、
90、
91、
92、
93、
94、
95、步骤7.4,类似地,有
96、
97、其中,
98、
99、
100、
101、
102、
103、
104、
105、
106、步骤7.5,根据步骤7.4,得出
107、
108、其中,
109、
110、
111、
112、
113、步骤7.6,根据步骤7.3、7.4、7.5,有
114、
115、
116、步骤7.7,根据步骤7.5,则有
117、v1(k)≤πv2(k),k≥0,
118、其中,p1≤πp2,q1≤πq2,s1j≤πs2j,r1j≤πr2j(j=1,2),z1≤πz2,
119、步骤7.8,由步骤7.6、7.7可得
120、
121、步骤7.9,根据步骤4.2、4.3,可以得出
122、
123、其中,
124、
125、步骤7.10、假设对其应用舒尔补引理,得到
126、
127、其中,ω(d)=[d(d) 0 g(d) o(d)],
128、步骤7.11,综合考虑步骤7.8、7.9、7.10,显然有
129、
130、步骤7.12,使用变量替换法求取状态反馈安全同步控制器增益,设计(β,j=1,2),ti1=x-1,ti2=δix-1,(i=1,2,3),k=yx-t,并对步骤7.3、7.4和7.5中的线性矩阵不等式替换相应变量即可得到所需状态反馈安全同步控制器增益。
131、本发明的有益效果如下:本发明方法首先利用复杂信息物理网络建立网联车系统的状态空间模型。借助李亚普诺夫稳定性理论和线性矩阵不等式技术设计了状态反馈安全同步控制器,使得遭受虚假数据注入攻击的网联车系统安全同步,从而有效缓解交通挤塞,并提高了其安全性和可靠性。基于多胞体模型,建立了混合时延与虚假数据注入攻击于一体的处理框架,确保网联车系统安全同步。
- 还没有人留言评论。精彩留言会获得点赞!