基于无人机仰角及距离和距离差的空时加权频谱感知方法
本发明涉及一种认知无线电网络系统中的频谱感知技术,尤其是涉及一种在地面主用户与无人机之间的水平距离已知且不知道地面主用户信号到达时刻的情况下基于无人机仰角及距离和距离差的空时加权频谱感知方法。
背景技术:
1、无人机在环境保护、交通监视、救灾、监控检查和电力检查等方面的应用前景广阔。与此同时,无人机相关应用的发展也面临诸多挑战,其中之一就是无人机通信频谱资源的短缺。近年来,随着5g及物联网和设备对设备(d2d)通信的发展,可用频谱变得越来越拥挤。由于缺乏专用频谱,无人机通信通常在未授权的频段上工作。因此,用于无人机通信的认知无线电备受关注。
2、为解决缺乏频谱资源的问题,认知无线电(cognitive radio,cr)技术应运而生。cr是一种解决无线通信的频谱资源的技术。在认知无线电网络系统中,次级用户(secondary users,sus)利用频谱感知来识别主用户(primary user,pu)信道的状态(空闲或忙碌),并决定是否接入该信道,以降低对主用户通信的干扰。
3、常见的频谱感知方法有基于协方差特征值的检测法、基于协方差元素绝对值的检测法、匹配滤波检测法、基于循环平稳的检测法和能量检测法等。基于协方差特征值的检测法和能量检测法易受噪声不确定性的影响。匹配滤波检测法和基于循环平稳的检测法需要主用户的先验知识。为解决部分环境下主用户隐藏的问题,基于上述检测法的多种协作频谱感知方法被提出,有效地提升了检测性能。常见的协作频谱感知方法有等增益合并方法(equal-gain combining,egc)和最大归一化能量方法(maximum normalized energy,mne)和最大比合成(maximum ratio combining,mrc)方法。在实际场景中,主用户随机到达会造成检测性能下降,因此,一系列针对该问题的频谱感知方法也被提出,如p范数方法(lineof l-norm,lop)、逐步加权方法(stepwise increase weighted,so)、多天线线性范数权重法(multiple antenna linearly norm weighted,malw)、多天线p范数权重法(multipleantenna linear p-norm weighted,p-malw)、贝叶斯广义似然比检验法(bayesiangeneralized likelihood ratio test,bayesian-glrt)、能量加权检测法(weightedenergy detection,wed)等。
4、但在无人机通信场景中,无人机与地面主用户之间的信道为空对地信道,即视距/非视距复合信道,当地面主用户到无人机之间的信道为非视距信道时,会因建筑物等阻挡导致频谱感知性能下降。且实际情况中不同无人机分布较广,导致不同的无人机上接收信号信噪比不同,且地面主用户信号到达不同无人机的时刻不同,在极端情况下,无人机距离主用户过远时,采集到的样本将全部为噪声。上述频谱感知方法无法完全适配无人机通信环境,频谱感知性能低下。
技术实现思路
1、本发明所要解决的技术问题是提供一种基于无人机仰角及距离和距离差的空时加权频谱感知方法,其能够克服因无人机与地面主用户之间的空对地信道、地面主用户到多架不同无人机的信号信噪比不同时、地面主用户信号到达不同无人机的时刻不同时现有频谱感知方法的频谱感知性能低下的缺点,利用无人机的仰角信息及距离信息和距离差信息进行协作频谱感知,在地面主用户位置即地面主用户与无人机之间的水平距离已知情况下能够实现可靠的频谱感知,频谱感知性能好。
2、本发明解决上述技术问题所采用的技术方案为:一种基于无人机仰角及距离和距离差的空时加权频谱感知方法,其特征在于包括以下步骤:
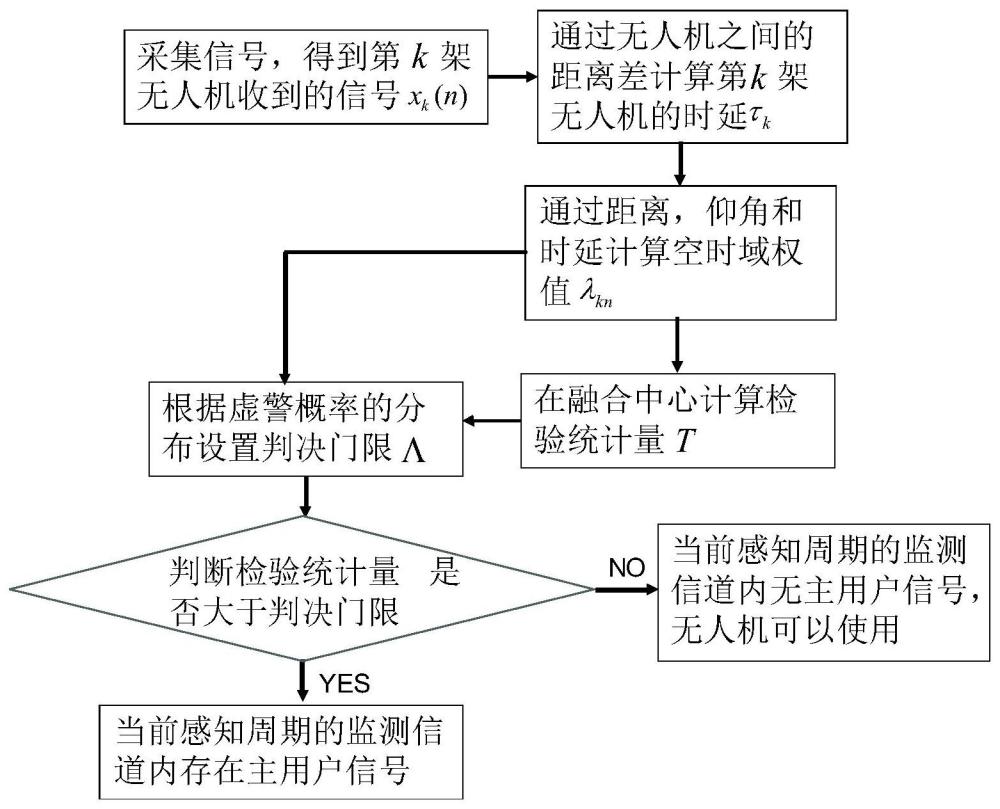
3、步骤1:设无人机认知无线电网络系统中有k架无人机,设第k架无人机上接收到的第n个采样时刻的信号为xk(n);其中,k>1,k=1,2,…,k,n=1,2,…,n,n表示采样时刻总数;
4、步骤2:无人机认知无线电网络系统中的融合中心计算各架无人机与地面主用户之间的垂直距离和,以及各架无人机与地面主用户之间的仰角和,对应记为d和υ;并计算各架无人机与离地面主用户最近的无人机的距离差,将第k架无人机与离地面主用户最近的无人机的距离差表示为dk-d0;其中,dk表示第k架无人机与地面主用户之间的垂直距离,d0表示离地面主用户最近的无人机与地面主用户之间的垂直距离;
5、步骤3:融合中心根据无人机的仰角信息及距离信息和距离差信息,计算每架无人机上接收到的各个采样时刻的信号的空时域加权系数,将xk(n)的空时域加权系数记为λk,n,其中,ζk表示第k架无人机与地面主用户之间的仰角,符号为向上取整符号,fs表示无人机的采样频率,c表示光速;
6、步骤4:融合中心根据每架无人机上接收到的n个采样时刻的信号及其空时域加权系数,计算每架无人机的空时域加权功率,将第k架无人机的空时域加权功率记为pk,其中,符号“| |”为取模运算符号;
7、步骤5:融合中心根据所有无人机的空时域加权功率,计算检验统计量,记为t,
8、步骤6:融合中心判断检验统计量t是否大于或等于判决门限λ以实现频谱感知,若t≥λ,则判定当前感知周期的监测信道内有授权用户信号即有地面主用户信号,无人机不能使用该频段;若t<λ,则判定当前感知周期的监测信道内无授权用户信号即无地面主用户信号,无人机可以使用该频段。
9、所述步骤2中,其中,dk表示第k架无人机与地面主用户之间的垂直距离。
10、所述步骤2中,其中,ζk表示第k架无人机与地面主用户之间的仰角。
11、所述步骤2中,各架无人机与地面主用户之间的垂直距离在[300,320]米内随机产生,各架无人机与地面主用户之间的水平距离在[0,1000]米内随机产生。
12、所述步骤6中,判决门限λ根据虚警概率并通过λ=μ0+q-1(pf)σ0计算得到,其中,μ0表示地面主用户信号不存在的情况下的检验统计量的概率密度函数的均值,表示高斯白噪声的功率,的单位为dbm,n0表示噪声功率谱密度,b表示无人机接收处的系统带宽,f表示噪声特征,q函数为标准正态分布的互补累计分布函数,q-1是q的反函数,pf表示虚警概率,表示地面主用户信号不存在的情况下的检验统计量的概率密度函数的方差,
13、与现有技术相比,本发明的优点在于:
14、本发明方法通过无人机到地面主用户之间的垂直距离和水平距离计算得到无人机到地面主用户的仰角,将仰角更高的无人机赋予更高的权重,而无人机与地面主用户之间的空对地信道的性质是仰角更高的无人机更有可能使用视距信道,从而提升频谱感知性能;将距离地面主用户更近的无人机赋予更大的权重,而通常情况下距离地面主用户越近的无人机接收信号信噪比更高,这使得接收信号信噪比高的无人机获得了更大的权重;通过无人机之间的距离差计算主用户到达不同无人机之间的时延,将到达时刻在时域上对应加权,解决了因地面主用户信号到达不同无人机的时刻不同导致的频谱感知性能低下的问题;通过时域和空域的同时加权,最大程度地克服了无人机分布广泛和无人机的空对地信道下由于建筑物遮挡造成的性能下降问题,在极端情况下仍然有较好的检测性能。
- 还没有人留言评论。精彩留言会获得点赞!