基于点云的环境重构和确定性信道建模方法
本发明涉及无线通信,具体涉及一种基于点云的环境重构和确定性信道建模方法。
背景技术:
1、移动通信技术的飞速发展,极大的提升了人们的生活质量。5g(the5thgeneration,5g)移动通信系统因为其具有高速率、低时延、超可靠传输的特点被广泛应用于移动医疗、车联网、智能家居、工业控制、环境监测等领域,让“万物互联”逐渐成为现实。5g移动通信系统广泛采用的毫米波通信具有丰富的频谱资源,但是与6ghz以下通信频段相比,毫米波信道具有自由空间损耗高、遮挡衰减严重的特点,这些特性对毫米波移动信道建模提出了更高的要求,带来了更多的挑战。
2、为了满足用户在不同场景下的个性化需求,5g网络在设计时需要对不同区域的无线网络部署环境进行科学的分析,但毫米波信道测量设备昂贵,部署过程复杂且无法对复杂多变的移动场景进行完整的测量的特点使通过信道测量来获取信道的传输特性的方案在实际实行时具有较高难度。利用确定性仿真方法对无线信道进行建模不仅极大地提高了无线网络的设计效率,还能更加科学的解决实际工程问题,降低网络建设成本,是推动未来通信技术发展的关键技术。但是由于确定性仿真方法依赖环境的具体模型,而环境模型大多需要专业的测绘数据以保证准确度,然后再进行人工绘制,因此在环境数据获取和模型重建问题上都非常具有挑战性。长期以来,激光雷达及其产生的点云数据被广泛应用于环境感知、自动驾驶等领域。同时,随着人工智能等新技术的快速发展,现如今也被逐渐应用于视觉辅助无线通信、无线传播环境感知重构以及无线信道建模信道参数预测中。
3、如果通过点云数据等数字化手段对传播环境进行精准重构,再利用重建后的环境模型进行确定性仿真实现信道建模,可以极大地程度的支撑无线信道建模领域的研究,解决确定性仿真在环境数据获取和模型重建上的难点,进一步支撑未来无线通信系统的发展。
4、目前,现有技术中还没有一种有效的实现环境数据高精度采集和重建并应用于确定性信道建模的方法。
技术实现思路
1、本发明的目的在于提供一种基于点云的环境重构和确定性信道建模方法,以实现基于点云的环境高精度采集和模型重建,并基于重建模型实现确定性信道建模,以解决上述背景技术中的至少一项技术问题。
2、为了实现上述目的,本发明采取了如下技术方案:
3、本发明提供一种基于点云的环境重构和确定性信道建模方法,包括:
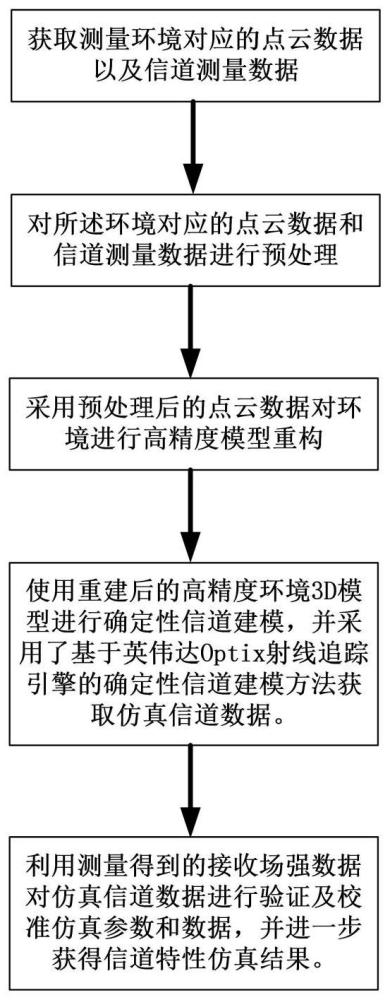
4、获取测量环境对应的点云数据以及信道测量数据,对所述环境对应的点云数据和信道测量数据进行预处理;
5、利用预处理后的点云数据对环境进行高精度模型重构;
6、使用重建后的高精度环境3d模型进行确定性信道建模,并采用了基于英伟达optix射线追踪引擎的射线追踪仿真方法获取仿真信道数据;
7、利用窄带测量得到的信道数据对仿真信道数据进行验证和校准仿真参数和数据,然后进一步获得信道宽带特性仿真结果。
8、优选地,所述的获取环境对应的点云数据以及信道测量数据,对所述环境对应的点云数据和信道测量数据进行预处理,以在某隧道环境中的测量为例,包括:
9、在隧道内开展窄带信道测量以研究无线电波传播功率的距离损耗特性和衰落的统计数据以研究信道的空间变化规律。发射系统由基站和发射天线两部分组成,发射天线分别通过同轴电缆连接到相应的基站,安装在隧道墙内侧。为了将信号覆盖隧道的前部和后部,基站同时连接了两个具有相同的配置的发射天线天线,彼此同时发射信号独立工作,不受相互干扰。接收系统由接收天线和场强测试仪组成,接收天线固定在地铁列车顶部,其配置参数与发射天线完全一致。接收天线与车载机柜相连,并通过射频电缆场强测试仪相连以记录接收无线信号的场强。场强测试仪包含距离传感模块,该模块可以记录并存储发射天线和接收天线之间的最大直线距离。此外,接收端和发射端都配备了同步计时单元以确保两端之间的时间同步,从而提高测量结果的准确性。
10、在得到测量数据后,根据测量数据文件名记录的发射机名称整理来自同一发射机的场强信号,由于列车在上下行转换过程中可能有部分信号受到了车厢的遮挡,则需将该部分数据去除。同时,数据中包含由距离传感模块记录的位置信息。通过对接收场强数据进行40倍波长的滑动平均可以消除小尺度衰落的影响,并将经过处理后的数据进行基于最小二乘法的数据拟合可到信道路径损耗对数模型,公式为:
11、pl(d)[db]=pl(d0)+10nlog(d/d0)+xσ (1)
12、在隧道内开展窄带信道测量的同时同步采集隧道内点云数据。点云数据由架设在地铁列车上的环境信息采集系统获得。环境信息采集系统由采集端和控制端两部分组成,采集端主要包括激光雷达和控制器,激光雷达需要部署在车体或车窗外等可以无遮挡扫描到隧道环境的位置,用以快速获取一定范围内的高精度隧道环境信息;采集端连接到车内控制端用以实时进行数据配准和点云地图构建并实时显示。
13、优选地,利用预处理后的点云数据对环境进行高精度模型重构,包括:
14、所述环境高精度模型包括两部分:高精度点云环境地图和3d环境重构模型。所述高精度点云环境采用融入后端优化的fast-lio-samslam系统构建点云地图。首先将雷达、imu等多源数据首先输入到预处理模块,雷达数据经过一定时间的数据积累以后进行特征提取,提取出面点和角点。imu数据进行前向传播,通过积分得到粗略位姿估计,再进行反向传播进行运动补偿,然后计算雷达里程计的残差,利用迭代卡尔曼滤波估计位姿变换直至收敛,最后根据位姿建图并更新特征地图。对生成的点云地图进行进一步数据处理,包括:对点云数据进行降采样以减少计算量;对点云地图进行平移、旋转等适当操作;对点云地图进行直通、半径滤波等操作获取所需的部分点云地图用以3d环境重构模型;采用dbscan密度聚类、ransac等点云分割算法分割点云地图内的不同物体并精简点云地图。
15、所述3d环境重构模型采用处理后的高精度点云地图进行构建。构建3d环境重构模型采用了泊松曲面重建法,给定一组对边界进行采样的定向点,可以通过以下方式获得重建网格模型,包括:将定向的点样本变换为3d中的连续矢量场;找到梯度与矢量场最匹配的标量函数;提取适当的等值面。泊松重构将环境的点云数据重构为包含大量三角形的网格结构数据,可以恢复隧道环境中的细节特征。
16、优选地,所述使用重建后的高精度环境3d模型进行确定性信道建模,并采用了基于英伟达optix射线追踪引擎的确定性信道建模方法获取仿真信道数据,包括:
17、将经过泊松重建后的高精度隧道3d模型按点云分割结果分别赋予测试频段下材料电磁参数,并导入所述射线追踪仿真方法中进行模拟。在3d模型中设置正确的发射机位置及高度,同时将接收机设置为与地铁列车运动速度相同的移动状态。在以所述隧道模型为仿真环境的射线追踪仿真中,将发射天线设为朝向隧道一侧的方向性天线,将接收天线设置为全向天线;将反射最长路径设置为1000m,若多次反射总距离超出该距离则视为无效路径;将最大反射次数设置为10次,若路径反射次数超出该次数则视为无效路径;将接收机接收的最多路径数设为30,按接收功率大小进行排序,超过该数量的反射路径将被舍弃。此外,射线追踪仿真器支持gpu进行加速运算。使用所述确定性信道建模方法首先获得隧道重构环境内的接收场强仿真数据。
18、优选地,利用窄带测量得到的信道数据对仿真信道数据进行验证和校准仿真参数和数据,然后进一步获得信道宽带特性仿真结果,包括:
19、所述信道宽带特性仿真结果主要包括:功率时延谱pdp,表征无线信道中接收端接收到的信号的功率与到达时间延迟之间的关系;均方根时延扩展,用于定量表征无线多径信道的时间色散,用功率时延谱的二阶矩来定义,可以表示为:
20、
21、莱斯k因子,定义为接收信号中功率最强的多径功率与其余多径功率之和的比值,可以通过以下公式进行计算:
22、
23、其中kf为莱斯k因子,pstrongest和premaining分别为功率最强的多径的功率和其余多径的功率,单位为mw。通过窄带测量结果对所述信道场强仿真数据进行验证,以矫正确定性仿真使用的各项参数以及仿真结果,并使用经过矫正的射线追踪仿真器进行信道仿真,获取信道宽带特性仿真结果。
24、本发明有益效果:基于同步定位与地图绘制算法fast-lio-sam和泊松重建算法,实现基于点云的环境重构和确定性信道建模,能够实现环境信息的高精度采集和重建,环境重建模型可以直接应用于无线信道确定性建模仿真而无需复杂的人工环境模型构建。
25、本发明附加的方面和优点将在下面的描述中部分给出,这些将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!