一种煤矿回采工作面跟机视频动态切换方法、装置和系统与流程
本发明涉及煤矿综采监控,特别是一种煤矿回采工作面跟机视频动态切换方法、装置和系统。
背景技术:
1、煤矿回采工作面做为煤矿生产的第一线,开采环境差、设备众多,工作面场所也处于不断变化中,不适宜人员长期在工作面作业,特别对于煤机司机需要跟随煤机移动时,如遇煤机滚筒超高打到液压支架极易导致支架顶板事故,因此监控人员通过远程方式及时掌握煤机滚筒工作状态能够保障回采作业的安全高效。
2、现有煤矿回采工作面数字孪生系统已实现工作面设备建模、开采环境建模以及综采设备监测监控数据的实时驱动,但由于缺乏井下真实开采环境的对照,并不能满足智能开采少人化乃至无人化的需求。
3、煤机相对定位技术多数采用红外传感器定位,但该定位技术精度低,如遇砸损、进水、煤尘覆盖等状况下,易导致数据丢失,从而导致煤机定位数据丢架和跳架等情况。
4、选用左右滚筒各偏移固定距离外的摄像仪,结合摄像仪至煤壁采用固定距离计算云台预置点的方法,并不能精确切换摄像仪和计算预置点,导致跟机视频切换出现延迟、不连续、无法精准监控滚筒工作状态等现象。
技术实现思路
1、鉴于上述问题,本发明提出了一种煤矿回采工作面跟机视频动态切换方法、装置和系统。
2、本发明实施例提供了一种煤矿回采工作面跟机视频动态切换方法,所述煤矿回采工作面跟机视频动态切换方法包括:
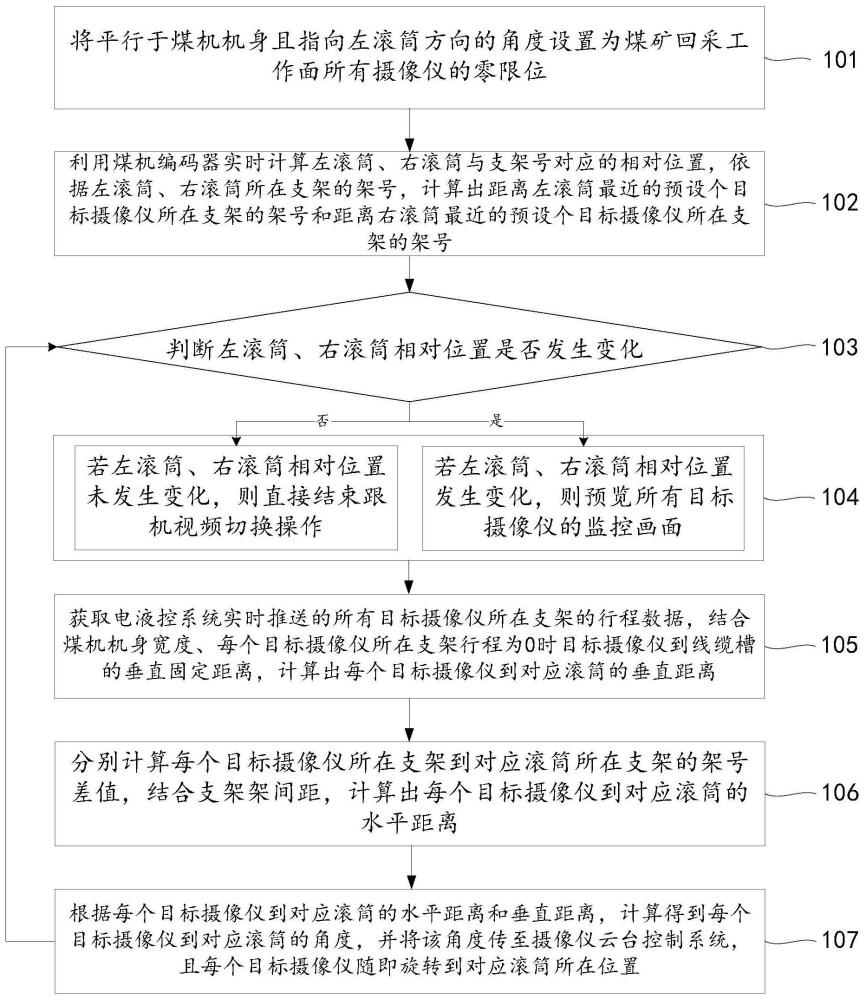
3、步骤1:将平行于煤机机身且指向左滚筒方向的角度设置为煤矿回采工作面所有摄像仪的零限位;
4、步骤2:利用煤机编码器实时计算左滚筒、右滚筒与支架号对应的相对位置,依据左滚筒、右滚筒所在支架的架号,计算出距离左滚筒最近的预设个目标摄像仪所在支架的架号和距离右滚筒最近的预设个目标摄像仪所在支架的架号;
5、步骤3:判断所述左滚筒、右滚筒相对位置是否发生变化;
6、步骤4:若所述左滚筒、右滚筒相对位置未发生变化,则直接结束跟机视频切换操作,若所述左滚筒、右滚筒相对位置发生变化,则预览所有目标摄像仪的监控画面;
7、步骤5:获取电液控系统实时推送的所有目标摄像仪所在支架的行程数据,结合煤机机身宽度、每个目标摄像仪所在支架行程为0时目标摄像仪到线缆槽的垂直固定距离,计算出每个目标摄像仪到对应滚筒的垂直距离;
8、步骤6:分别计算每个目标摄像仪所在支架到对应滚筒所在支架的架号差值,结合支架架间距,计算出每个目标摄像仪到对应滚筒的水平距离;
9、步骤7:根据每个目标摄像仪到对应滚筒的水平距离和垂直距离,计算得到每个目标摄像仪到对应滚筒的角度,并将该角度传至摄像仪云台控制系统,且每个目标摄像仪随即旋转到对应滚筒所在位置;
10、步骤8:当所述左滚筒、所述右滚筒相对位置发生变化时,重复执行步骤3至步骤7,动态切换所述左滚筒、所述右滚筒的跟机视频。
11、可选地,所述摄像仪包括:ptz摄像仪;所述ptz摄像仪沿所述煤矿回采工作面每隔固定间距支架安装一个;
12、将平行于煤机机身且指向左滚筒方向的角度设置为煤矿回采工作面所有摄像仪的零限位,包括:
13、登录所述摄像仪云台控制系统,将所述ptz摄像仪的监控画面旋转至平行于煤机机身且指向所述左滚筒方向,同时设置t和z值为固定值,将该角度下的监控画面设置为所述ptz摄像仪的零限位,零限位时p值为0;
14、当已设置零限位的ptz摄像仪沿顺时针方向旋转180度,则所述ptz摄像仪平行于所述煤机机身且指向所述右滚筒,此位置p值为180。
15、可选地,利用煤机编码器实时计算左滚筒、右滚筒与支架号对应的相对位置,依据左滚筒、右滚筒所在支架的架号,计算出距离左滚筒最近的预设个目标摄像仪所在支架的架号和距离右滚筒最近的预设个目标摄像仪所在支架的架号,包括:
16、获取所述煤机编码器实时计算的所述左滚筒、所述右滚筒与支架号对应的相对位置的信息;
17、根据所述左滚筒、所述右滚筒所在架号,在预设的工作面摄像仪信息文件或预设的摄像仪数据库中筛选出距离所述左滚筒最近的所述目标摄像仪所在支架的架号,和距离所述右滚筒最近的所述目标摄像仪所在支架的架号,并记录所述目标摄像仪所在支架的架号;
18、其中,位于所述左滚筒、所述右两滚筒之间的摄像仪不在筛选结果中,且与所述左滚筒、所述右滚筒对应支架上的摄像仪在筛选结果中。
19、可选地,获取电液控系统实时推送的所有目标摄像仪所在支架的行程数据,结合煤机机身宽度、每个目标摄像仪所在支架行程为0时目标摄像仪到线缆槽的垂直固定距离,计算出每个目标摄像仪到对应滚筒的垂直距离,包括:
20、确定所述目标摄像仪所在支架推溜行程为0时摄像仪到线缆槽的距离,其中所有摄像仪统一安装在各自所在支架顶梁固定位置处,则所述支架推溜行程为0时摄像仪到线缆槽的距离为固定值;
21、对每个目标摄像仪所在支架推溜行程为0时摄像仪到线缆槽的距离、所述煤机机身宽度以及每个目标摄像仪所在支架实时行程进行求和运算,得到每个目标摄像仪到各自对应滚筒的垂直距离。
22、可选地,分别计算每个目标摄像仪所在支架到对应滚筒所在支架的架号差值,结合支架架间距,计算出每个目标摄像仪到对应滚筒的水平距离,包括:
23、确定每个目标摄像仪所在支架的架号;
24、确定所述左滚筒、所述右滚筒各自对应支架的架号;
25、根据每个目标摄像仪所在支架的架号,和所述左滚筒、所述右滚筒各自对应支架的架号,计算得到每个目标摄像仪所在支架架号到滚筒对应支架架号差值的绝对值;
26、对所述绝对值和所述支架架间距进行乘积运算,得到每个目标摄像仪到对应滚筒的水平距离;
27、其中,所述支架架间距为固定值。
28、可选地,根据每个目标摄像仪到对应滚筒的水平距离和垂直距离,计算得到每个目标摄像仪到对应滚筒的角度,并将该角度传至摄像仪云台控制系统,且每个目标摄像仪随即旋转到对应滚筒所在位置,包括:
29、对所述左滚筒对应的目标摄像仪到左滚筒的垂直距离和水平距离做反正切函数运算,得到所述左滚筒对应的目标摄像仪到左滚筒的第一角度值;
30、将所述第一角度值减去180后得到的绝对值确定为所述左滚筒对应的目标摄像仪传入所述摄像仪云台控制系统的最新p值,该最新p值传入所述摄像仪云台控制系统完成所述左滚筒对应的目标摄像仪预置点设置;
31、对所述右滚筒对应的目标摄像仪到右滚筒的垂直距离和水平距离做反正切函数运算,得到所述右滚筒对应的目标摄像仪到右滚筒的第二角度值;
32、将所述第二角度值确定为所述右滚筒对应的目标摄像仪传入所述摄像仪云台控制系统的最新p值,该最新p值传入所述摄像仪云台控制系统完成所述右滚筒对应的目标摄像仪预置点设置。
33、可选地,若所述左滚筒对应的任一目标摄像仪到所述左滚筒的水平距离为0,则该目标摄像仪的p值自动设置为90并传入所述摄像仪云台控制系统,不再进行所述反正切函数运算;或者,
34、若所述右滚筒对应的任一目标摄像仪到所述右滚筒的水平距离为0时,则该目标摄像仪的p值自动设置为90并传入所述摄像仪云台控制系统,不再进行所述反正切函数运算。
35、第二方面,本发明实施例提供一种煤矿回采工作面跟机视频动态切换装置,所述煤矿回采工作面跟机视频动态切换装置包括:
36、摄像仪零限位设置模块,用于将平行于煤机机身且指向左滚筒方向的角度设置为煤矿回采工作面所有摄像仪的零限位;
37、煤机相对位置实时采集模块,用于利用煤机编码器实时计算左滚筒、右滚筒与支架号对应的相对位置,依据左滚筒、右滚筒所在支架的架号,计算出距离左滚筒最近的预设个目标摄像仪所在支架的架号和距离右滚筒最近的预设个目标摄像仪所在支架的架号;
38、判断模块,用于判断所述左滚筒、右滚筒相对位置是否发生变化;
39、跟机摄像仪预览模块,用于若所述左滚筒、右滚筒相对位置发生变化,则预览所有目标摄像仪的监控画面;
40、云台控制模块,包括:垂直距离生成子模块、水平距离生成子模块以及云台控制子模块;
41、所述垂直距离生成子模块,用于获取电液控系统实时推送的所有目标摄像仪所在支架的行程数据,结合煤机机身宽度、每个目标摄像仪所在支架行程为0时目标摄像仪到线缆槽的垂直固定距离,计算出每个目标摄像仪到对应滚筒的垂直距离;
42、所述水平距离生成子模块,用于分别计算每个目标摄像仪所在支架到对应滚筒所在支架的架号差值,结合支架架间距,计算出每个目标摄像仪到对应滚筒的水平距离;
43、云台控制子模块,用于根据每个目标摄像仪到对应滚筒的水平距离和垂直距离,计算得到每个目标摄像仪到对应滚筒的角度,并将该角度传至摄像仪云台控制系统,且每个目标摄像仪随即旋转到对应滚筒所在位置;
44、迭代模块,用于当所述左滚筒、所述右滚筒相对位置发生变化时,控制所述判断模块、所述跟机摄像仪预览模块、所述云台控制模块重复执行操作,动态切换所述左滚筒、所述右滚筒的跟机视频;
45、结束模块,用于若所述左滚筒、右滚筒相对位置未发生变化,则直接结束跟机视频切换操作。
46、可选地,所述摄像仪包括:ptz摄像仪;所述ptz摄像仪沿所述煤矿回采工作面每隔固定间距支架安装一个;
47、所述摄像仪零限位设置模块具体用于:
48、登录所述摄像仪云台控制系统,将所述ptz摄像仪的监控画面旋转至平行于煤机机身且指向所述左滚筒方向,同时设置t和z值为固定值,将该角度下的监控画面设置为所述ptz摄像仪的零限位,零限位时p值为0;
49、当已设置零限位的ptz摄像仪沿顺时针方向旋转180度,则所述ptz摄像仪平行于所述煤机机身且指向所述右滚筒,此位置p值为180。
50、可选地,所述煤机相对位置实时采集模块具体用于:
51、获取所述煤机编码器实时计算的所述左滚筒、所述右滚筒与支架号对应的相对位置的信息;
52、根据所述左滚筒、所述右滚筒所在架号,在预设的工作面摄像仪信息文件或预设的摄像仪数据库中筛选出距离所述左滚筒最近的所述目标摄像仪所在支架的架号,和距离所述右滚筒最近的所述目标摄像仪所在支架的架号,并记录所述目标摄像仪所在支架的架号;
53、其中,位于所述左滚筒、所述右两滚筒之间的摄像仪不在筛选结果中,且与所述左滚筒、所述右滚筒对应支架上的摄像仪在筛选结果中。
54、可选地,所述垂直距离生成子模块具体用于:
55、确定所述目标摄像仪所在支架推溜行程为0时摄像仪到线缆槽的距离,其中所有摄像仪统一安装在各自所在支架顶梁固定位置处,则所述支架推溜行程为0时摄像仪到线缆槽的距离为固定值;
56、对每个目标摄像仪所在支架推溜行程为0时摄像仪到线缆槽的距离、所述煤机机身宽度以及每个目标摄像仪所在支架实时行程进行求和运算,得到每个目标摄像仪到各自对应滚筒的垂直距离。
57、可选地,所述水平距离生成子模块具体用于:
58、确定每个目标摄像仪所在支架的架号;
59、确定所述左滚筒、所述右滚筒各自对应支架的架号;
60、根据每个目标摄像仪所在支架的架号,和所述左滚筒、所述右滚筒各自对应支架的架号,计算得到每个目标摄像仪所在支架架号到滚筒对应支架架号差值的绝对值;
61、对所述绝对值和所述支架架间距进行乘积运算,得到每个目标摄像仪到对应滚筒的水平距离;
62、其中,所述支架架间距为固定值。
63、可选地,所述云台控制子模块具体用于:
64、对所述左滚筒对应的目标摄像仪到左滚筒的垂直距离和水平距离做反正切函数运算,得到所述左滚筒对应的目标摄像仪到左滚筒的第一角度值;
65、将所述第一角度值减去180后得到的绝对值确定为所述左滚筒对应的目标摄像仪传入所述摄像仪云台控制系统的最新p值,该最新p值传入所述摄像仪云台控制系统完成所述左滚筒对应的目标摄像仪预置点设置;
66、对所述右滚筒对应的目标摄像仪到右滚筒的垂直距离和水平距离做反正切函数运算,得到所述右滚筒对应的目标摄像仪到右滚筒的第二角度值;
67、将所述第二角度值确定为所述右滚筒对应的目标摄像仪传入所述摄像仪云台控制系统的最新p值,该最新p值传入所述摄像仪云台控制系统完成所述右滚筒对应的目标摄像仪预置点设置;
68、若所述左滚筒对应的任一目标摄像仪到所述左滚筒的水平距离为0,则该目标摄像仪的p值自动设置为90并传入所述摄像仪云台控制系统,不再进行所述反正切函数运算;或者,若所述右滚筒对应的任一目标摄像仪到所述右滚筒的水平距离为0时,则该目标摄像仪的p值自动设置为90并传入所述摄像仪云台控制系统,不再进行所述反正切函数运算。
69、第三方面,本发明实施例提供一种煤矿回采工作面跟机视频动态切换系统,所述煤矿回采工作面跟机视频动态切换系统包括:煤机左右滚筒相对位置及支架行程数据采集模块、跟机视频动态切换模块、云台摄像仪、控制器;
70、所述煤机左右滚筒相对位置及支架行程数据采集模块,基于发布、订阅方式的消息协议,实现煤机左右滚筒相对位置、支架行程数据毫秒级传输,并将数据发送至工业机,保障跟机视频切换时效性和精确度;
71、所述跟机视频预览模块,根据煤机左右滚筒相对位置信息筛选出距离左右滚筒最近的预设个目标摄像仪,以及判断煤机左右滚筒相对位置是否发生变化,若发生变化预览所有目标摄像仪的监控画面,否则结束跟机视频切换操作;
72、所述云台摄像仪,实时拍摄并回传煤矿回采工作面的视频,并根据预置点自动切换摄像视角;
73、所述控制器,部署于有操作系统的工业机,所述工控机中部署有煤机左右滚筒相对位置及支架行程数据采集程序;所述工控机上安装数据库,实现工作面摄像仪、煤机机身宽度、支架推移行程为0时摄像仪到线缆槽的垂直固定距离、支架架间距信息的修改、存储、查询,以及将计算出的目标摄像仪的架号信息发送至云台摄像仪控制系统计算目标摄像仪角度值,以使得云台摄像仪控制系统接收到角度值,完成目标摄像仪预置点设置,进而使得目标摄像仪随即旋转至滚筒方向,从而实现人机交互式运行。
74、本发明提供的煤矿回采工作面跟机视频动态切换方法,首先将平行于煤机机身且指向左滚筒方向的角度设置为煤矿回采工作面所有摄像仪的零限位;之后利用煤机编码器实时计算左滚筒、右滚筒与支架号对应的相对位置,依据左滚筒、右滚筒所在支架的架号,计算出距离左滚筒最近的预设个目标摄像仪所在支架的架号和距离右滚筒最近的预设个目标摄像仪所在支架的架号。
75、再判断左滚筒、右滚筒相对位置是否发生变化;若左滚筒、右滚筒相对位置未发生变化,则直接结束跟机视频切换操作,若左滚筒、右滚筒相对位置发生变化,则预览所有目标摄像仪的监控画面。
76、接着获取电液控系统实时推送的所有目标摄像仪所在支架的行程数据,结合煤机机身宽度、每个目标摄像仪所在支架行程为0时目标摄像仪到线缆槽的垂直固定距离,计算出每个目标摄像仪到对应滚筒的垂直距离;分别计算每个目标摄像仪所在支架到对应滚筒所在支架的架号差值,结合支架架间距,计算出每个目标摄像仪到对应滚筒的水平距离。
77、根据每个目标摄像仪到对应滚筒的水平距离和垂直距离,计算得到每个目标摄像仪到对应滚筒的角度,并将该角度传至摄像仪云台控制系统,且每个目标摄像仪随即旋转到对应滚筒所在位置。最后当左滚筒、右滚筒相对位置发生变化时,重复执行上述步骤,动态切换左滚筒、右滚筒的跟机视频。
78、本发明所提受煤矿回采工作面跟机视频动态切换方法,在煤机左右滚筒相对位置发生变化,反复进行迭代计算左右滚筒相对应的多个目标摄像仪,精准切换摄像仪和计算预置点,跟机视频切换不会出现延迟、不连续、无法精准监控滚筒工作状态等现象,保证了监控视频的精准性、连续性,保障集控人员随时能够远程观察到采煤机左右滚筒状况。同时,在回采工作面智能开采中视频跟机系统可以辅助数字孪生管控系统,能够及时观测工作面片帮和漏顶、滚筒和支架护帮板之间的位置干涉等异常情况,及时观测工作面异常情况,辅助实现工作面少人化、无人化开采,提高工作面开采过程中异常情况的处置能力。
- 还没有人留言评论。精彩留言会获得点赞!