一种带有事件触发机制的鲁棒协同状态估计方法及系统
本发明涉及传感网络状态估计,特别是涉及一种带有事件触发机制的鲁棒协同状态估计方法及系统。
背景技术:
1、随着传感器网络技术的发展,基于移动传感器网络的分布式状态估计在环境监测、信息融合、目标跟踪等方向,得到了广泛的应用,并吸引了极大的关注。分布式卡尔曼滤波算法成为解决带有高斯白噪声的离散时间系统,在处理噪声和测量噪声环境下进行状态估计最常用的算法之一。分布式卡尔曼滤波算法不仅产生比集中式较少的通信负担,而且在传感器或某些传感器工作异常时,对拓扑切换具有较强的鲁棒性。移动传感器网络的充分发展使获得更准确的测量信息成为可能,从而提高了对机动目标状态估计的准确性。将分布式传感器网络技术应用于分布式卡尔曼滤波算法,在近几年的研究中受到了极大的关注。为了有助于准确地估计目标的状态,基于分布式传感器网络的分布式卡尔曼滤波算法在机动目标跟踪中被广泛使用。与此同时,基于一致性的算法成为解决分布式状态估计问题最流行的方法之一。基于一致性的分布式状态估计算法通过融合相邻节点的最新测量值或估计值,使局部滤波算法得到的信息对达到相同的值。因此,基于一致性的分布式状态估计算法可以分为三类:测量一致性、估计一致性和混合一致性。
2、尽管基于一致性的算法在移动传感器网络(分布式传感器网络)上的分布式状态估计,可以用于解决分布式状态估计问题,但高机动目标的准确状态估计仍然具有挑战性。由于环境和目标的机动特性不确定,在遇到通信网络拥堵、噪音干扰、断续观测或数据包丢失等情况时,很难对目标进行状态估计。通常,很难直接根据分布式传感器网络准确地获得目标的动作状态。此外,分布式传感器网络的传感器通常由电池供电,这就让这个过程也依赖着电池寿命。然而,对传感器进行间歇性监视、减少数据处理也依然是亟待解决的问题。其中,有很多文献与此相关,例如用于信息融合的基于一致性的分布式卡尔曼滤波算法,用于减少能量消耗的事件触发机制,以及用于中性目标跟踪的强跟踪过滤算法。olfati-saber r提出了用于线性系统状态估计的分布式卡尔曼滤波算法和用于非线性系统的分布式扩展卡尔曼滤波,这也形成了分布式容积卡尔曼滤波算法的基本框架。在分布式框架中,传感器网络中的节点仅将最新的局部传感数据与其相邻节点切换。battistelli g和chisci l分析了分布式扩展卡尔曼滤波算法在一定限制条件下的稳定性,然而,当系统具有高度非线性特性时,分布式扩展卡尔曼滤波算法仍然存在一些限制,而这促进了分布式卡尔曼滤波器的发展。为了克服通信失败问题,ge qb分析相关噪声并提出了分布式容积卡尔曼滤波算法。基于加权平均一致性的间歇性观测,tan qk提出了分布式事件触发容积卡尔曼滤波算法。同时,基于事件触发机制,人们发表了许多的相关文章,进行了许多相关工作。miskowicz m提出了基于时间间隔发送信号机制的事件触发滤波,以降低能耗。zhang c提出了可以减轻通信负担的传感器对估计器的时间表。li通过引入事件触发机制提出了分布式无迹卡尔曼滤波算法,但只考虑单个传感器而不是分布式传感器网络。此外,为了跟踪机动目标,zhou dh提出了强跟踪算法。强跟踪算法引入了多个次优衰减因子,这些因子使剩余序列正交,来调整滤波器增益和协方差,进一步获得高机动目标的精确状态估计。zhang hw开发的强跟踪容积滤波算法不仅具有自适应和强跟踪算法的优势,同时也考虑了机动目标跟踪的自适应当前统计模型。到目前为止,分布式滤波算法对机动目标的间歇性观察跟踪依旧是一项具有挑战性的工作。
3、因此,如何精确实现机动目标的间歇性观察跟踪,尤其是如何实现鲁棒协同状态的精确估计,成为本领域亟待解决的技术问题。
技术实现思路
1、为解决现有技术存在的上述问题,本发明提供了一种带有事件触发机制的鲁棒协同状态估计方法及系统。
2、为实现上述目的,本发明提供了如下方案。
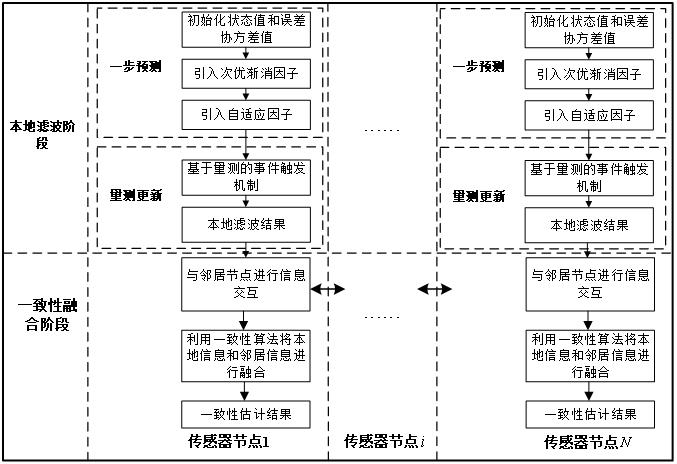
3、一种带有事件触发机制的鲁棒协同状态估计方法,包括:引入事件触发机制得到非线性系统的观测方程。所述非线性系统为传感网络。
4、引入次优渐消因子实时调整非线性系统的误差协方差矩阵。
5、基于调整后的所述误差协方差矩阵确定卡尔曼滤波增益。
6、基于所述卡尔曼滤波增益和所述观测方程对本地节点进行滤波得到本地滤波结果。
7、将所述本地滤波结果中的估计值和误差协方差值作为信息对,采用一致性算法进行信息融合得到非线性系统的状态估计结果。
8、可选地,所述事件触发机制的事件触发因子为:。
9、式中,表示第个传感器在k时刻的事件触发因子,表示第个传感器在k时刻的目标测量值,表示第个传感器在时刻的目标测量值,表示触发阈值,t表示转置。
10、可选地,引入事件触发机制得到的非线性系统的观测方程为:。
11、式中,表示第个传感器在时刻的目标测量值。
12、可选地,次优渐消因子为:。
13、式中,表示k时刻的次优渐消因子,表示k时刻的残差弱化方程,表示k时刻的协方差弱化方程,表示中间值,表示求的迹的数学运算。
14、可选地,所述本地滤波结果为:。
15、式中,表示第个传感器在k时刻的目标状态估计值,表示第个传感器在k-1时刻的采样点状态预测值,表示卡尔曼滤波增益,表示第个传感器在k时刻的后验观测值,表示第个传感器在k时刻的中间参量,表示第个传感器在时刻的目标测量值,表示第个传感器在k时刻对目标状态估计的误差协方差,表示第个传感器在k-1时刻目标状态估计的误差协方差,表示第i个传感器在k时刻目标测量值的误差协方差。
16、一种带有事件触发机制的鲁棒协同状态估计系统,包括:传感器、存储器和处理器。
17、传感器,用于获取状态值和测量值。
18、存储器,用于存储计算机程序。
19、处理器,分别与所述传感器和所述存储器连接,用于调取所述计算机程序,并基于所述状态值和所述测量值执行所述计算机程序,以实现非线性系统的状态估计。所述计算机程序用于实施上述提供的带有事件触发机制的鲁棒协同状态估计方法。所述非线性系统为由多个所述传感器形成的传感网络。
20、可选地,所述处理器包括:事件触发机制引入模块、次优渐消因子引入模块、卡尔曼滤波增益确定模块、本地节点滤波模块和状态估计模块。
21、事件触发机制引入模块,用于引入事件触发机制得到非线性系统的观测方程。
22、次优渐消因子引入模块,用于引入次优渐消因子实时调整非线性系统的误差协方差矩阵。
23、卡尔曼滤波增益确定模块,用于基于调整后的所述误差协方差矩阵确定卡尔曼滤波增益。
24、本地节点滤波模块,用于基于所述卡尔曼滤波增益和所述观测方程对本地节点进行滤波得到本地滤波结果。
25、状态估计模块,用于将所述本地滤波结果中的估计值和误差协方差值作为信息对,采用一致性算法进行信息融合得到非线性系统的状态估计结果。
26、可选地,所述存储器为计算机可读存储介质。
27、根据本发明提供的具体实施例,本发明公开了以下技术效果:本发明引入事件触发机制,能够减少传感器间的通信负担。在应用过程中,机载计算资源和通信资源是有限的,通过引入事件触发机制,当相邻两次测量误差达到触发阈值时,再对预测进行更新修正。相比于传统固定时间间隔更新的方法,事件触发机制可以有效降低每个传感器的机载计算资源和节点间的通信资源,大大提高算法效率。并且,针对目标大机动的情况,引入次优渐消因子来实现对大机动目标的准确估计,可以调整滤波增益强行使得残差序列正交,减轻过去时刻数据对当前时刻滤波值的影响,从而实现对目标状态的准确估计,进而控制目标机动突变时对滤波的影响,提高滤波精度。最后,利用一致性算法对本地滤波结果进行融合,实现状态的精确估计。
- 还没有人留言评论。精彩留言会获得点赞!