3D相机及其控制方法、控制装置和可读存储介质与流程
本发明涉及相机,具体而言,涉及一种3d相机及其控制方法、控制装置和可读存储介质。
背景技术:
1、现有技术中的3d相机,在出厂调焦时,往往采用人眼调焦的方式对其进行调焦,但此种调焦方式既不精确,效率也较低。
技术实现思路
1、本发明旨在至少解决现有技术或相关技术中存在的技术问题之一。
2、为此,本发明的第一个目的在于提出了一种3d相机的控制方法。
3、本发明的第二个目的在于提出了一种3d相机的控制装置。
4、本发明的第三个目的在于提出了一种3d相机。
5、本发明的第四个目的在于提出了一种可读存储介质。
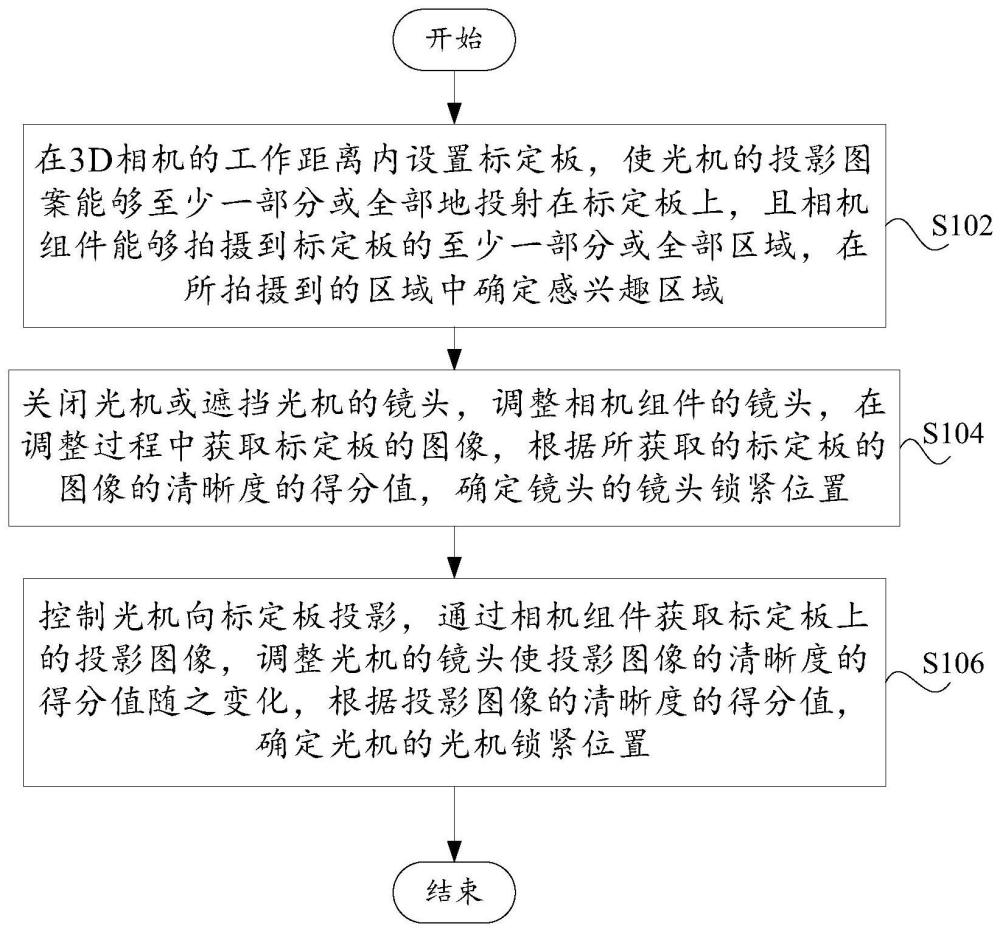
6、为实现上述至少一个目的,根据本发明的第一方面,提出了一种3d相机的控制方法,3d相机包括相机组件和光机,控制方法包括:在3d相机的工作距离内设置标定板,使光机的投影图案能够至少一部分或全部地投射在标定板上,且相机组件能够拍摄到标定板的至少一部分或全部区域,在所拍摄到的区域中确定感兴趣区域;关闭光机或遮挡光机的镜头,调整相机组件的镜头,在调整过程中获取标定板的图像,根据所获取的标定板的图像的清晰度的得分值,确定镜头的镜头锁紧位置;控制光机向标定板投影,通过相机组件获取标定板上的投影图像,调整光机的镜头使投影图像的清晰度的得分值随之变化,根据投影图像的清晰度的得分值,确定光机的光机锁紧位置。
7、本技术提出了一种3d相机的控制方法,该控制方法用于3d相机的调焦过程。该3d相机的控制方法所用于的3d相机包括相机组件和光机,其中,相机组件用于获取图像,光机用于在立体或平面物体上投影图案,相机组件能够获取光机所投影的图案以实现3d拍摄效果。
8、在对3d相机进行调焦时,首先在3d相机的工作距离内设置标定板,使光机的投影图案能够至少一部分或全部地投射在标定板上,且相机组件能够拍摄到标定板的至少一部分或全部区域,在所拍摄到的区域中确定感兴趣区域。具体地,3d相机能够在标定板上进行投影,并获取标定板上的图像,在对3d相机进行调焦时,先调整标定板的位置,可通过上下调整、左右调整以及前后调整的位置调整方式,使标定板位于3d相机的工作距离内,以使光机的投影图案能够至少一部分或全部地透射在标定板上,并且相机组件能够拍摄到标定板的至少一部分或全部区域。然后,在所拍摄到的区域中确定感兴趣区域。
9、在确定感兴趣区域之后,关闭光机或遮挡光机的镜头,调整相机组件的镜头,在调整过程中获取标定板的图像,根据所获取的标定板的图像的清晰度的得分值,确定镜头的镜头锁紧位置。具体地,通过相机组件的镜头能够获取标定板的图像,相机组件的镜头能够在一定的范围内旋转,在相机组件的镜头旋转至不同位置时,相机组件所获取的标定板的图像的清晰度的得分值不同,根据相机组件的镜头所获取的标定板的图像的清晰度的得分值,可确定相机组件的镜头的镜头锁紧位置。
10、在确定镜头锁紧位置之后,控制光机向标定板投影,通过相机组件获取标定板上的投影图像,调整光机的镜头使投影图像的清晰度的得分值随之变化,根据投影图像的清晰度的得分值,确定光机的光机锁紧位置。具体地,光机用于向标定板投影图案,在确定相机组件的镜头的镜头锁紧位置之后,控制光机向标定板进行投影,然后通过被锁紧于镜头锁紧位置的相机组件的镜头获取标定板上的投影图像。可理解地,光机组件的镜头能够在一定的范围内旋转,在相机组件的镜头保持固定,而光机组件的镜头旋转至不同位置的情况下,相机组件所获取的投影图像的清晰度的得分值随之变化,根据相机组件所获取的投影图像的清晰度的得分值,可确定光机的镜头的光机锁紧位置,以使光机锁紧位置与镜头锁紧位置适配,完成3d相机的调焦过程。
11、通过采取上述控制方法对3d相机进行调焦,可避免通过人眼对3d相机的调焦过程进行控制,提升了3d相机调焦的精确度和调焦效率。
12、根据本发明上述的3d相机的控制方法,还可以具有以下区别技术特征:
13、在一些技术方案中,可选地,相机组件的镜头能够在第一位置与第二位置之间旋转,调整相机组件的镜头,在调整过程中获取标定板的图像,根据所获取的标定板的图像的清晰度的得分值,确定镜头的镜头锁紧位置,具体包括:将相机组件的镜头由第一位置旋转至第二位置,在相机组件的镜头旋转的过程中,获取标定板的多个第一图像;基于多个第一图像确定清晰度的得分值最高的第一图像作为第一目标图像,确定第一目标图像的清晰度的得分值为目标得分值;将相机组件的镜头由第二位置向第一位置旋转,并实时获取当前相机组件的镜头所获取的第一图像的清晰度的得分值,在第一图像的清晰度的得分值最接近目标得分值时停止旋转相机组件的镜头,并确定当前相机组件的镜头所在的位置为镜头锁紧位置。
14、在该技术方案中,对调整相机组件的镜头,在调整过程中获取标定板的图像,根据所获取的标定板的图像的清晰度的得分值,确定镜头的镜头锁紧位置这一步骤进行具体限定。相机组件的镜头能够在第一位置和第二位置之间旋转,其中,第一位置可以为相机组件的镜头的左极位置,第二位置可以为相机组件的镜头的右极位置,在相机组件的镜头由第一位置向第二位置旋转的过程中,相机组件的镜头所获取的图像的清晰度的得分值发生变化。
15、具体地,在确定相机组件的镜头的镜头锁紧位置时,首先将相机组件的镜头由第一位置旋转至第二位置,在相机组件的镜头旋转的过程中,获取标定板的多个第一图像。由于相机组件的镜头在旋转的过程中,相机组件的镜头不断获取标定板的图像作为第一图像,随着相机组件的镜头的位置发生变化,相机组件所获取的第一图像的清晰度的得分值随之变化,相机组件获取了多个具有不同清晰度的得分值的第一图像。然后,对多个第一图像的清晰度的得分值进行评价,确定多个第一图像确定清晰度的得分值最高的第一图像作为第一目标图像,同时确定第一目标图像的清晰度的得分值为目标得分值。
16、然后将相机组件的镜头由第二位置向第一位置旋转,并实时获取当前相机组件的镜头所获取的第一图像的清晰度的得分值,在第一图像的清晰度的得分值最接近目标得分值时停止旋转相机组件的镜头,并确定当前相机组件的镜头所在的位置为镜头锁紧位置。
17、通过采取上述控制方法,可根据相机组件的镜头所获取的图像的不同清晰度的得分值对相机组件的镜头的镜头锁紧位置进行确定,无需通过人眼对调焦过程进行控制,提升了3d相机调焦的精确度和调焦效率。
18、在一些技术方案中,可选地,基于多个第一图像确定清晰度的得分值最高的第一图像作为第一目标图像,具体包括:根据评价函数对多个第一图像的清晰度的得分值进行评价,将清晰度的得分值最高的第一图像作为第一目标图像。
19、在该技术方案中,对基于多个第一图像确定清晰度的得分值最高的第一图像作为第一目标图像这一步骤进行具体限定。在确定第一目标图像时,可根据评价函数对多个第一图像的清晰度的得分值进行评价,然后根据评价结果在多个第一图像的清晰度的得分值中选取清晰度的得分值最高的第一图像作为第一目标图像,并且将第一目标图像的清晰度的得分值作为目标得分值。此种图像评价方式具有高精度和高效率的优点。
20、在一些技术方案中,可选地,光机的镜头能够在第三位置与第四位置之间旋转,调整所述光机的镜头使投影图像的清晰度的得分值随之变化,根据投影图像的清晰度的得分值,确定光机的光机锁紧位置,具体包括:将光机的镜头由第三位置朝第四位置旋转,在光机的镜头旋转的过程中,评价投影图像的清晰度的得分值;将光机的镜头由第四位置向第三位置旋转,并实时获取当前投影图像的清晰度的得分值,在投影图像的清晰度的得分值最接近目标得分值时停止旋转光机的镜头,并确定当前光机的镜头所在的位置为光机锁紧位置。。
21、在该技术方案中,对调整所述光机的镜头使投影图像的清晰度的得分值随之变化,根据投影图像的清晰度的得分值,确定光机的光机锁紧位置这一步骤进行具体限定。光机的镜头能够在第三位置和第四位置之间旋转,其中,第三位置可以为光机的镜头的左极位置,第四位置可以为光机的镜头的右极位置。光机能够向标定板投影,相机组件获取光机在标定板上的投影作为投影图像,在光机的镜头由第三位置向第四位置旋转,并且相机组件的镜头固定于镜头锁紧位置的过程中,相机组件所获取的投影图像的清晰度的得分值发生变化,对相机组件所获取的多个投影图像的清晰度的得分值进行评价。然后将光机的镜头由第四位置向第三位置旋转,并实时获取当前投影图像的清晰度的得分值,在投影图像的清晰度的得分值最接近目标得分值时停止旋转光机的镜头,并确定当前光机的镜头所在的位置为光机锁紧位置。
22、通过采取上述控制方法,可通过调整光机的镜头使相机组件所获取的投影图像的清晰度的得分值发生变化,并根据多个投影图像的清晰度的得分值确定光机的镜头的光机锁紧位置,无需通过人眼对调焦过程进行控制,提升了3d相机调焦的精确度和调焦效率。
23、在一些技术方案中,可选地,评价投影图像的清晰度的得分值,具体包括:根据评价函数对多个投影图像的清晰度的得分值进行评价。
24、在该技术方案中,对评价投影图像的清晰度的得分值这一步骤进行具体限定。在相机组件获取多个投影图像时,根据评价函数对多个投影图像的清晰度的得分值进行评价,然后选取多个投影图像中清晰度的得分值与目标得分值最为接近的投影图像,与该投影图像所对应的光机的镜头的位置即为光机锁紧位置。此种图像评价方式具有高精度和高效率的优点。
25、在一些技术方案中,可选地,评价函数为能量梯度函数eog、roberts函数、tenengrad函数、brenner函数、variance函数或laplace函数中的任一者或组合。
26、在该技术方案中,对评价函数进行限定。具体地,评价函数为能量梯度函数eog、roberts函数、tenengrad函数、brenner函数、variance函数或laplace函数中的任一者或组合。上述评价函数的精度较高,准确性好,运算速度快。
27、在一些技术方案中,可选地,标定板上具有多个目标点,在所拍摄到的区域中确定感兴趣区域,具体包括:在所拍摄到的区域中选取预选区域,确定预选区域中的目标点的数量大于预设值,确定预选区域为感兴趣区域。
28、在该技术方案中,对在所拍摄到的区域中确定感兴趣区域这一步骤进行具体限定。标定板上具有多个目标点,在确定感兴趣区域时,先在相机组件所拍摄到的区域中选取预选区域,由于标定板上具有多个目标点,对预选区域中的目标点的数量进行评价,在确定预选区域中的目标点的数量大于预设值时,确定预选区域为感兴趣区域。
29、本发明的第二方面提出了一种3d相机的控制装置,3d相机包括相机组件和光机,3d相机的控制装置包括:设置模块,设置模块用于在3d相机的工作距离内设置标定板,使光机的投影图案能够至少一部分或全部地投射在标定板上,且相机组件能够拍摄到标定板的至少一部分或全部区域;第一确认模块,第一确认模块用于在所拍摄到的区域中确定感兴趣区域;第一调整模块,第一调整模块用于关闭光机或遮挡光机的镜头,调整相机组件的镜头;第二确认模块,第二确认模块用于在调整过程中获取标定板的图像,根据所获取的标定板的图像的清晰度的得分值,确定镜头的镜头锁紧位置;控制模块,控制模块用于控制光机向所述标定板投影;第一获取模块,第一获取模块用于通过相机组件获取标定板上的投影图像;第二调整模块,第二调整模块用于调整光机的镜头使投影图像的清晰度的得分值随之变化;第三确认模块,第三确认模块用于根据投影图像的清晰度的得分值,确定光机的光机锁紧位置。
30、本技术提出了一种3d相机的控制装置,该控制装置用于3d相机的调焦过程。该3d相机的控制装置所用于的3d相机包括相机组件和光机,其中,相机组件用于获取图像,光机用于在立体或平面物体上投影图案,相机组件能够获取光机所投影的图案以实现3d拍摄效果。
31、3d相机的控制装置包括设置模块、第一确认模块、第一调整模块、第二确认模块、控制模块、第一获取模块、第二调整模块和第三确认模块。其中,设置模块用于在3d相机的工作距离内设置标定板,使光机的投影图案能够至少一部分或全部地投射在标定板上,且相机组件能够拍摄到标定板的至少一部分或全部区域,第一确认模块用于在所拍摄到的区域中确定感兴趣区域。具体地,3d相机能够在标定板上进行投影,并获取标定板上的图像,在对3d相机进行调焦时,先调整标定板的位置,可通过上下调整、左右调整以及前后调整的位置调整方式,使标定板位于3d相机的工作距离内,以使光机的投影图案能够至少一部分或全部地透射在标定板上,并且相机组件能够拍摄到标定板的至少一部分或全部区域。然后,在所拍摄到的区域中确定感兴趣区域。
32、进一步地,第一调整模块用于关闭光机或遮挡光机的镜头,调整相机组件的镜头,第二确认模块用于在调整过程中获取标定板的图像,根据所获取的标定板的图像的清晰度的得分值,确定镜头的镜头锁紧位置。具体地,通过相机组件的镜头能够获取标定板的图像,相机组件的镜头能够在一定的范围内旋转,在相机组件的镜头旋转至不同位置时,相机组件所获取的标定板的图像的清晰度的得分值不同,根据相机组件的镜头所获取的标定板的图像的清晰度的得分值,可确定相机组件的镜头的镜头锁紧位置。
33、进一步地,控制模块用于控制光机向所述标定板投影,第一获取模块用于通过相机组件获取标定板上的投影图像,第二调整模块用于调整光机的镜头使投影图像的清晰度的得分值随之变化,第三确认模块用于根据投影图像的清晰度的得分值,确定光机的光机锁紧位置。具体地,光机用于向标定板投影图案,在确定相机组件的镜头的镜头锁紧位置之后,控制光机向标定板进行投影,然后通过被锁紧于镜头锁紧位置的相机组件的镜头获取标定板上的投影图像。可理解地,光机组件的镜头能够在一定的范围内旋转,在相机组件的镜头保持固定,而光机组件的镜头旋转至不同位置的情况下,相机组件所获取的投影图像的清晰度的得分值随之变化,根据相机组件所获取的投影图像的清晰度的得分值,可确定光机的镜头的光机锁紧位置,以使光机锁紧位置与镜头锁紧位置适配,完成3d相机的调焦过程。
34、通过采取上述3d相机的控制装置对3d相机进行调焦,可避免通过人眼对3d相机的调焦过程进行控制,提升了3d相机调焦的精确度和调焦效率。
35、在一些技术方案中,可选地,相机组件的镜头能够在第一位置与第二位置之间旋转,第一调整模块具体用于将相机组件的镜头由第一位置旋转至第二位置;3d相机的控制装置还包括:第二获取模块,第二获取模块用于在相机组件的镜头旋转的过程中,获取标定板的多个第一图像;第二确认模块具体用于基于多个第一图像确定清晰度的得分值最高的第一图像作为第一目标图像,确定第一目标图像的清晰度的得分值为目标得分值,在将相机组件的镜头由第二位置向所述第一位置旋转时,实时获取当前相机组件的镜头所获取的第一图像的清晰度的得分值,在第一图像的清晰度的得分值最接近目标得分值时停止旋转所述相机组件的镜头,并确定当前相机组件的镜头所在的位置为所述镜头锁紧位置。
36、在该技术方案中,对3d相机的控制装置进行进一步限定。相机组件的镜头能够在第一位置与第二位置之间旋转,其中,第一位置可以为相机组件的镜头的左极位置,第二位置可以为相机组件的镜头的右极位置,在相机组件的镜头由第一位置向第二位置旋转的过程中,相机组件的镜头所获取的图像的清晰度的得分值发生变化。
37、第一调整模块具体用于将相机组件的镜头由第一位置旋转至第二位置。3d相机的控制装置还包括第二获取模,第二获取模块用于在相机组件的镜头旋转的过程中,获取标定板的多个第一图像。具体地,在确定相机组件的镜头的镜头锁紧位置时,首先将相机组件的镜头由第一位置旋转至第二位置,在相机组件的镜头旋转的过程中,获取标定板的多个第一图像。由于相机组件的镜头在旋转的过程中,相机组件的镜头不断获取标定板的图像作为第一图像,随着相机组件的镜头的位置发生变化,相机组件所获取的第一图像的清晰度的得分值随之变化,相机组件获取了多个具有不同清晰度的得分值的第一图像。
38、进一步地,第二确认模块具体用于基于多个第一图像确定清晰度的得分值最高的第一图像作为第一目标图像,确定第一目标图像的清晰度的得分值为目标得分值,在将相机组件的镜头由第二位置向所述第一位置旋转时,实时获取当前相机组件的镜头所获取的第一图像的清晰度的得分值,在第一图像的清晰度的得分值最接近目标得分值时停止旋转所述相机组件的镜头,并确定当前相机组件的镜头所在的位置为所述镜头锁紧位置。具体地,对多个第一图像的清晰度的得分值进行评价,确定多个第一图像确定清晰度的得分值最高的第一图像作为第一目标图像,同时确定第一目标图像的清晰度的得分值为目标得分值。在确定第一目标图像以及目标得分值之后,将相机组件的镜头由第二位置向第一位置旋转,并实时获取当前相机组件的镜头所获取的第一图像的清晰度的得分值,在第一图像的清晰度的得分值最接近目标得分值时停止旋转相机组件的镜头,并确定当前相机组件的镜头所在的位置为镜头锁紧位置。
39、通过采取上述3d相机的控制装置,可根据相机组件的镜头所获取的图像的不同清晰度的得分值对相机组件的镜头的镜头锁紧位置进行确定,无需通过人眼对调焦过程进行控制,提升了3d相机调焦的精确度和调焦效率。
40、在一些技术方案中,可选地,光机的镜头能够在第三位置与第四位置之间旋转,第二调整模块还用于将光机的镜头由第三位置朝第四位置旋转;3d相机的控制装置还包括:评价模块,用于在光机的镜头旋转的过程中,评价投影图像的清晰度的得分值;第三确认模块具体用于将光机的镜头由第四位置向第三位置旋转,并实时获取当前投影图像的清晰度的得分值,在投影图像的清晰度的得分值最接近目标得分值时停止旋转光机的镜头,并确定当前光机的镜头所在的位置为光机锁紧位置。
41、在该技术方案中,对3d相机的控制装置进行进一步限定。光机的镜头能够在第三位置与第四位置之间旋转,其中,第三位置可以为光机的镜头的左极位置,第四位置可以为光机的镜头的右极位置。
42、进一步地,第二调整模块还用于将光机的镜头由第三位置朝第四位置旋转,3d相机的控制装置还包括评价模块,评价模块用于在光机的镜头旋转的过程中,评价投影图像的清晰度的得分值。具体地,光机能够向标定板投影,相机组件获取光机在标定板上的投影作为投影图像,在光机的镜头由第三位置向第四位置旋转,并且相机组件的镜头固定于镜头锁紧位置的过程中,相机组件所获取的投影图像的清晰度的得分值发生变化。对相机组件所获取的多个投影图像的清晰度的得分值进行评价。
43、进一步地,第三确认模块具体用于将光机的镜头由第四位置向第三位置旋转,并实时获取当前投影图像的清晰度的得分值,在投影图像的清晰度的得分值最接近目标得分值时停止旋转光机的镜头,并确定当前光机的镜头所在的位置为光机锁紧位置。
44、通过采取上述3d相机的控制装置,可通过调整光机的镜头使相机组件所获取的投影图像的清晰度的得分值发生变化,并根据多个投影图像的清晰度的得分值确定光机的镜头的光机锁紧位置,无需通过人眼对调焦过程进行控制,提升了3d相机调焦的精确度和调焦效率。
45、在一些技术方案中,可选地,第一确认模块具体用于在所拍摄到的区域中选取预选区域,确定预选区域中的目标点的数量大于预设值,确定预选区域为感兴趣区域。
46、在该技术方案中,对3d相机的控制装置进行进一步限定。第一确认模块具体用于在所拍摄到的区域中选取预选区域,确定预选区域中的目标点的数量大于预设值,确定预选区域为感兴趣区域。具体地,标定板上具有多个目标点,在确定感兴趣区域时,先在相机组件所拍摄到的区域中选取预选区域,由于标定板上具有多个目标点,对预选区域中的目标点的数量进行评价,在确定预选区域中的目标点的数量大于预设值时,确定预选区域为感兴趣区域。
47、本发明的第三方面还提出了一种3d相机,包括:如本发明第二方面所提出的3d相机的控制装置。
48、本发明第三方面提供的3d相机,因包括本发明第二方面提出的3d相机的控制装置,因此具有3d相机的控制装置的全部有益效果。
49、本发明的第四方面还提出了一种可读存储介质,可读存储介质上存储有程序或指令,程序或指令被处理器执行时实现如本发明第一方面所提出的3d相机的控制方法的步骤。因而具有上述第一方面中任一可能设计中的3d相机的控制方法的全部有益技术效果。
50、本发明的附加方面和优点将在下面的描述部分中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!