基于LPVO和排序的可逆信息隐藏方法及系统
本发明涉及信息安全,具体地说是基于lpvo和排序的可逆信息隐藏方法及系统。
背景技术:
1、可逆信息隐藏(reversible data hiding,rdh)是一种数字图像处理技术,可逆数据隐藏的目的是通过对主机图像的像素进行轻微的修改,将秘密数据嵌入到主机图像中,更重要的是要从标记好的图像中完全恢复原始图像和嵌入的数据。
2、pvo(pixel-value-ordering),像素值排序是一种可逆信息隐藏方法,通过调整图像块内的最大和最小像素值来嵌入数据,以确保可逆性。然而,pvo方法存在如下问题:生成的二维预测误差直方图形状不规则,因此难以设计适当的直方图修改策略;基于经验的二维映射策略可能导致嵌入性能不够优化。为了克服这些问题,近期引入了基于位置的像素值排序(lpvo)方法,在lpvo中,预测器不仅考虑像素值的顺序,还利用像素的位置信息,以更精准地预测像素的特性;与仅修改图像块最大和最小像素值的pvo不同,lpvo采用了块内多个像素值进行嵌入操作,这使得通过lpvo预测器生成的二维预测误差直方图形状更加规则,从而更适合于可逆嵌入操作,这一改进使得lpvo方法在数据隐藏方面表现更出色。
3、在可逆数据隐藏(rdh)算法中,关键问题是选择适合的像素、像素对或像素块来进行信息嵌入。一种常见的方法是优先考虑那些复杂度较低、平滑度较高的区域,因为这些区域内上下文像素与预测像素或目标像素之间的相关性较高,预测更准确。然而,直接根据预测误差的大小来嵌入信息可能会导致提取时的失真。为了解决这个问题,常规策略是利用目标像素周围的相邻像素来估计目标区域的平滑度,从而选择合适的区域进行信息嵌入。这种方法可以先嵌入那些平滑度较小的区域,以获得更好的性能表现。
4、在现有的可逆信息隐藏中,在固定的块中寻找块内相邻像素进行求取复杂度、缺乏考虑四周相邻像素块对复杂度的影响,如何克服上述问题,是需要解决的技术问题。
技术实现思路
1、本发明的技术任务是针对以上不足,提供基于lpvo和排序的可逆信息隐藏方法及系统,来解决在现有的可逆信息隐藏中,在固定的块中寻找块内相邻像素进行求取复杂度、缺乏考虑四周相邻像素块对复杂度的影响的技术问题。
2、第一方面,本发明一种基于lpvo和排序的可逆信息隐藏方法,包括如下步骤:
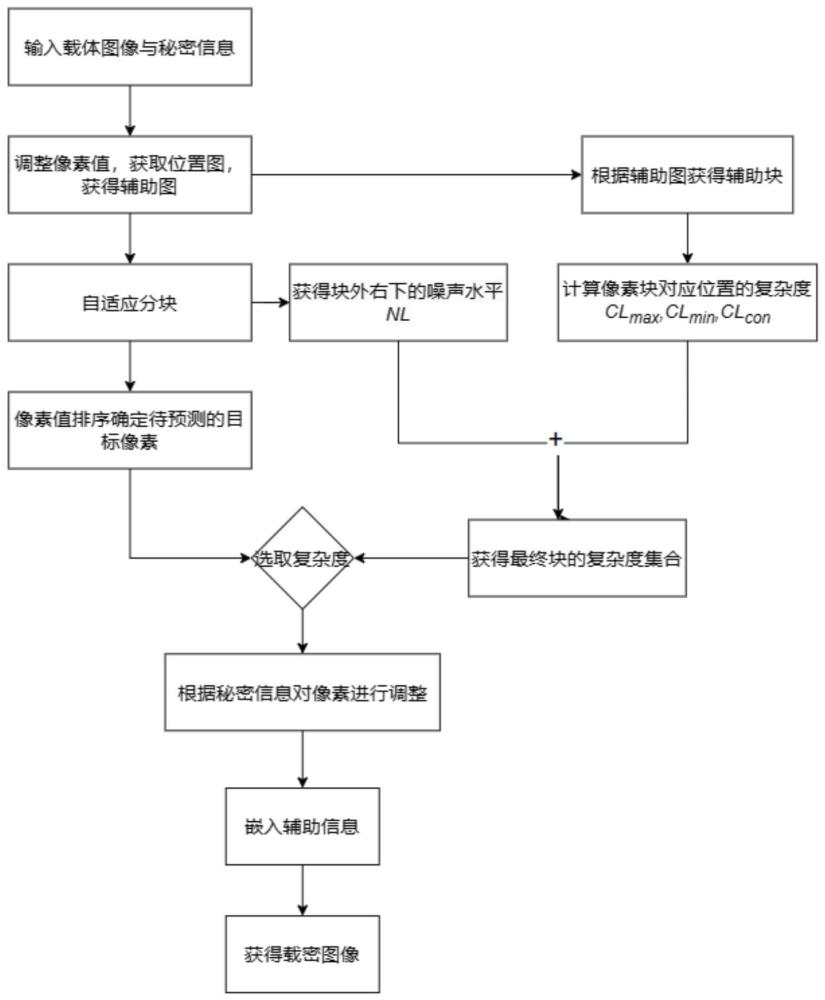
3、图像处理:对载体图像的下边界区域和右边界区域进行防溢出处理,得到预处理后图像,复制预处理后图像作为辅助图,并创建用于记录异常位置信息的位置图信息;
4、像素块处理:基于自适应像素块划分方法、将预处理后图像划分为多个互不重叠的像素块,对于每个像素块,确定目标像素、并计算目标像素相对像素块的位置坐标以及像素块相对预处理后图像的位置坐标,对于每个目标像素,基于其在预处理后图像中位置查找辅助图中具有相同位置的像素、并将像素值替换为无穷大,其中,目标像素为需要进行修改的像素,包括m对像素值最大的像素以及m对像素值最小的像素,m大于等于1;
5、辅助块处理:将辅助图划分为多个辅助块、且辅助块与像素块一一对应,对于位于上边界区域和左边界区域的辅助块,对辅助块向右及向下扩展,得到扩展后辅助块,对于位于其他区域的辅助块,以对应像素块的中心为所述辅助块的中心、基于中心向四周扩展,得到扩展后辅助块;
6、复杂度计算:对于每个像素块,对像素块内所有像素排序、确定参与预测的目标像素以及未参与预测的像素,基于对应辅助块的相邻像素和目标像素的相对位置选择不同数量的高相关性上下文像素,基于上下文像素、像素块内未参与预测的像素以及像素块相邻外部区域的噪声度计算像素块的复杂度;
7、信息嵌入:对于每个像素块,基于像素块的复杂度将秘密信息嵌入像素块,并将辅助信息嵌入像素块,辅助信息为恢复载体图像和提取秘密信息所需的信息,包括位置图信息。
8、作为优选,位置图以数组形式存储,创建用于记录异常位置信息的位置图信息时,将载体图像中每个像素的像素值转化为0-255范围内的二进制数组,并遍历载体图像中每个像素的像素值,将像素值为255或0的像素作为异常位置,通过异常值信息记录异常位置的数量。
9、作为优选,对于每个像素块,选取像素块右边界区域和下边界区域作为外部区域,基于外部区域内相邻像素的绝对差值计算像素块相邻外部区域的噪声度nl,计算公式如下:
10、nl=∑dver+∑dhor
11、其中,dver表示像素块外部区域垂直方向相邻两个像素的绝对差值,dhor表示像素块外部区域水平方向相邻两个像素的绝对差值。
12、作为优选,对于大小为n1×n2、具有2m个目标像素的像素块,复杂度计算包括如下步骤:
13、对于具有n1×n2个像素的像素块,将像素块内像素进行降序排序,得到序列其中,最大的前m个像素p1,…,pm以及最小的后m个像素为目标像素;
14、以为中心、向外扩展形成一个矩形环作为第一矩形环,并以为中心、向外扩展形成一个矩形环作为第二矩形环,提取第一矩形环和第二矩形环内像素组成像素集合,对于像素集合内的像素、将像素值为无穷大的像素作为异常去除,对于去除异常后的像素集合,对像素进行降序排序、并计算最大像素值与最小像素值之间的差值clmax;
15、以p1为中心、向外扩展形成一个矩形环作为第三矩形环,并以p2为中心、向外扩展形成一个矩形环作为第四矩形环,提取第三矩形环和第四矩形环内像素组成像素集合,对于像素集合内的像素、将像素值为无穷大的像素作为异常去除,对于去除异常后的像素集合,对像素进行降序排序、并计算最大像素值与最小像素值之间的差值clmin;
16、对于预测像素以及预测像素之间的像素计算最大像素值与最小像素值的差值clcon;
17、基于clmax、clmin、clcon以及像素块相邻外部区域的噪声度nl构建复杂度计算公式,复杂度cl的计算公式表示为:
18、cl=clcon+clmax+clmin+nl。
19、第二方面,本发明一种基于lpvo和排序的可逆信息隐藏系统,用于通过如第一方面任一项所述的一种基于lpvo和排序的可逆信息隐藏方法将秘密信息嵌入载体图像,所述系统包括图像处理模块、像素块处理模块、辅助块处理模块、复杂度计算模块以及信息嵌入模块;
20、图像处理模块用于执行如下:对载体图像的下边界区域和右边界区域进行防溢出处理,得到预处理后图像,复制预处理后图像作为辅助图,并创建用于记录异常位置信息的位置图信息;
21、像素块处理模块用于执行如下:基于自适应像素块划分方法、将预处理后图像划分为多个互不重叠的像素块,对于每个像素块,确定目标像素、并计算目标像素相对像素块的位置坐标以及像素块相对预处理后图像的位置坐标,对于每个目标像素,基于其在预处理后图像中位置查找辅助图中具有相同位置的像素、并将像素值替换为无穷大,其中,目标像素为需要进行修改的像素,包括m对像素值最大的像素以及m对像素值最小的像素,m大于等于1;
22、辅助块处理模块用于执行如下:将辅助图划分为多个辅助块、且辅助块与像素块一一对应,对于位于上边界区域和左边界区域的辅助块,对辅助块向右及向下扩展,得到扩展后辅助块,对于位于其他区域的辅助块,以对应像素块的中心为所述辅助块的中心、基于中心向四周扩展,得到扩展后辅助块;
23、复杂度计算模块用于执行如下:对于每个像素块,对像素块内所有像素排序、确定参与预测的目标像素以及未参与预测的像素,基于对应辅助块的相邻像素和目标像素的相对位置选择不同数量的高相关性上下文像素,基于上下文像素、像素块内未参与预测的像素以及像素块相邻外部区域的噪声度计算像素块的复杂度;
24、信息嵌入模块用于执行如下:对于每个像素块,基于像素块的复杂度将秘密信息嵌入像素块,并将辅助信息嵌入像素块,辅助信息为恢复载体图像和提取秘密信息所需的信息,包括位置图信息。
25、作为优选,所述图像处理模块用于将位置图以数组形式存储,创建用于记录异常位置信息的位置图信息时,所述图像处理模块用于执行如下:将载体图像中每个像素的像素值转化为0-255范围内的二进制数组,并遍历载体图像中每个像素的像素值,将像素值为255或0的像素作为异常位置,通过异常值信息记录异常位置的数量。
26、作为优选,对于每个像素块,所述复杂度计算模块用于选取像素块右边界区域和下边界区域作为外部区域,基于外部区域内相邻像素的绝对差值计算像素块相邻外部区域的噪声度nl,计算公式如下:
27、nl=∑dver+∑dhor
28、其中,dver表示像素块外部区域垂直方向相邻两个像素的绝对差值,dhor表示像素块外部区域水平方向相邻两个像素的绝对差值。
29、作为优选,对于大小为n1×n2、具有2m个目标像素的像素块,所述复杂度计算模块用于执行如下计算像素块的复杂度:
30、对于具有n1×n2个像素的像素块,将像素块内像素进行降序排序,得到序列其中,最大的前m个像素p1,…,pm以及最小的后m个像素为目标像素;
31、以为中心、向外扩展形成一个矩形环作为第一矩形环,并以为中心、向外扩展形成一个矩形环作为第二矩形环,提取第一矩形环和第二矩形环内像素组成像素集合,对于像素集合内的像素、将像素值为无穷大的像素作为异常去除,对于去除异常后的像素集合,对像素进行降序排序、并计算最大像素值与最小像素值之间的差值clmax;
32、以p1为中心、向外扩展形成一个矩形环作为第三矩形环,并以p2为中心、向外扩展形成一个矩形环作为第四矩形环,提取第三矩形环和第四矩形环内像素组成像素集合,对于像素集合内的像素、将像素值为无穷大的像素作为异常去除,对于去除异常后的像素集合,对像素进行降序排序、并计算最大像素值与最小像素值之间的差值clmin;
33、对于预测像素以及预测像素之间的像素计算最大像素值与最小像素值的差值clcon;
34、基于clmax、clmin、clcon以及像素块相邻外部区域的噪声度nl构建复杂度计算公式,复杂度cl的计算公式表示为:
35、cl=clcon+clmax+clmin+nl。
36、本发明的基于lpvo和排序的可逆信息隐藏方法及系统具有以下优点:通过复制预处理后的载体图像得到辅助图,将预处理后的载体图像划分为多个像素块后,将对应的将辅助图划分为多个辅助块、并对辅助块进行扩展操作,对于每个像素块,对于每个像素块,基于对应辅助块的相邻像素和目标像素的相对位置选择不同数量的高相关性上下文像素,基于上下文像素、像素块内未参与预测的像素以及像素块相邻外部区域的噪声度计算像素块的复杂度,提高;了lpvo像素块复杂度排序的准确性。
- 还没有人留言评论。精彩留言会获得点赞!