RSSI定位的位置优化方法和装置、电子设备和存储介质与流程
本技术涉及定位,尤其涉及一种rssi定位的位置优化方法和装置、电子设备和存储介质。
背景技术:
1、rssi(received signal strength indication)定位是一种基于信号强度测量的定位技术。利用无线网络基础设施,如:wi-fi、蓝牙等低成本硬件设备,通过分析接收到的信号强度来确定设备的位置。
2、rssi定位具有成本低、适用性广泛、实用性和灵活性高的优点。通常应用于大型建筑物、商场、机场等室内环境中,gps信号的可用性通常较差的室内外定位场景。相对的,由于rssi会受到多种环境因素影响,如信号干扰、传输路径阻塞、设备特性,导致其准确性(即,定位精度)和可靠性不足。单纯使用rssi解算得到的移动轨迹杂乱无章,毫无线性规律,无法应用到实际项目当中。为了解决这一问题,通常需要结合一些位置平滑和校正的算法对位置结果进行补偿和优化。
3、相关技术中,常见的基于rssi的位置优化算法和实现方式如下所述:
4、1、最近邻算法(nearest neighbor algorithm):该算法基于rssi值计算设备与已知参考点之间的距离,并将设备的位置确定为最接近的参考点位置。
5、2、加权最近邻算法(weighted nearest neighbor algorithm):类似于最近邻算法,但引入了距离加权因素,以提高定位精度。距离较近的参考点将具有更高的权重。
6、3、k最近邻算法(k-nearest neighbor algorithm):该算法考虑设备周围的多个参考点,并根据其距离和rssi值进行加权平均,以确定设备的位置。
7、4、指纹定位算法(fingerprint localization algorithm):该算法使用事先收集到的rssi指纹数据库,其中包含了各个位置的rssi值。通过匹配实时收集到的rssi值与数据库中的指纹数据,确定设备位置。
8、在实际测试中发现,在rssi信号质量连续稳定时,通过以上算法对解算出位置在一定程度上有平滑和均衡的效果。但是,在一些场景下,例如出现信号掉帧或者强弱不定等rssi信号质量不稳定的情况时,解算出的位置就会出现如“z”字抖动、长距离跳跃越等异常现象。
9、因此,相关技术中存在rssi信号质量不稳定的情况时,解算出的位置就会出现如“z”字抖动、长距离跳跃越等异常现象的问题。
技术实现思路
1、本技术提供了一种rssi定位的位置优化方法和装置、电子设备和存储介质,以至少解决相关技术中存在的rssi信号质量不稳定的情况时,解算出的位置就会出现如“z”字抖动、长距离跳跃越等异常现象的问题。
2、根据本技术实施例的一个方面,提供了一种rssi定位的位置优化方法,包括:
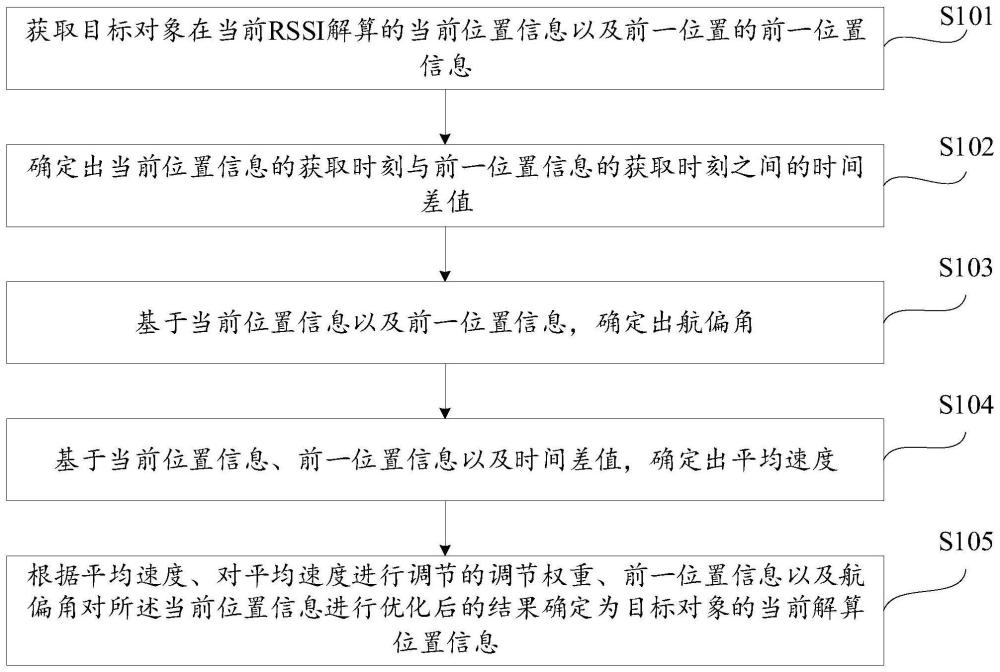
3、获取目标对象在当前rssi解算的当前位置信息以及前一位置的前一位置信息;
4、确定出所述当前位置信息的获取时刻与所述前一位置信息的获取时刻之间的时间差值;
5、基于所述当前位置信息以及所述前一位置信息,确定出航偏角;
6、基于所述当前位置信息、所述前一位置信息以及所述时间差值,确定出平均速度;
7、根据所述平均速度、对所述平均速度进行调节的调节权重、所述前一位置信息以及所述航偏角对所述当前位置信息进行优化后的结果确定为所述目标对象的当前解算位置信息。
8、可选地,如前述的方法,在所述确定出所述当前位置信息的获取时刻与所述前一位置信息的获取时刻之间的时间差值之后,所述方法还包括:
9、判断所述时间差值是否大于预设的时长上限阈值;
10、在确定所述时间差值小于或等于所述时长上限阈值的情况下,执行用于跳转至步骤所述基于所述当前位置信息以及所述前一位置信息,确定出航偏角的跳转操作;
11、在确定所述时间差值大于所述时长上限阈值的情况下,不执行所述跳转操作,并将所述当前位置信息确定为当前解算位置信息。
12、可选地,如前述的方法,所述基于所述当前位置信息以及所述前一位置信息,确定出航偏角,包括:
13、确定出所述当前位置信息所指示的第一坐标,以及所述前一位置信息所指示的第二坐标;
14、通过计算所述第一坐标与所述第二坐标连线的余弦值,确定出所述航偏角。
15、可选地,如前述的方法,所述根据所述平均速度、对所述平均速度进行调节的调节权重、所述前一位置信息以及所述航偏角对所述当前位置信息进行优化后的结果确定为所述目标对象的当前解算位置信息,包括:
16、确定出所述前一位置信息对应的偏移向量,其中,所述偏移向量用于指示所述目标对象移动至所述前一位置时的运动方向以及运动速度;
17、按照第一调节子权重对航偏向量的进行加权以及第二调节子权重对所述偏移向量进行加权,得到加权后向量,其中,所述调节权重包括所述第一调节子权重以及所述第二调节子权重,且所述第一调节子权重以及所述第二调节子权重的和为1,所述航偏向量为所述平均速度与所述航偏角的乘积;
18、根据所述前一位置信息、所述加权后向量以及所述时间差值,确定出所述当前解算位置信息。
19、可选地,如前述的方法,所述根据所述前一位置信息、所述加权后向量以及所述时间差值,确定出所述当前解算位置信息,包括:
20、确定出单位时间间隔;
21、通过确定已确定位置信息与偏移向量之和,确定出新确定位置信息,其中,在剩余时间差值大于所述单位时间间隔的情况下,所述偏移向量为所述单位时间间隔与所述加权后向量之积,在所述剩余时间差值小于或等于所述单位时间间隔的情况下,所述偏移向量为所述剩余时间差值与所述加权后向量之积,在首次执行所述确定已确定位置信息与偏移向量之和的情况下,所述已确定位置信息为所述前一位置信息且所述剩余时间差值为所述时间差值;
22、在剩余时间差值大于所述单位时间间隔的情况下,通过所述新确定位置信息对所述已确定位置信息进行更新,通过所述剩余时间差值与所述单位时间间隔之差对所述剩余时间差值进行更新,并执行用于跳转至步骤所述通过确定已确定位置信息与偏移向量之和,确定出新确定位置信息的跳转操作;
23、在所述剩余时间差值小于或等于所述单位时间间隔的情况下,将所述新确定位置信息确定为所述当前解算位置信息。
24、可选地,如前述的方法,在所述根据所述平均速度、对所述平均速度进行调节的调节权重、所述前一位置信息以及所述航偏角对所述当前位置信息进行优化后的结果确定为所述目标对象的当前解算位置信息之后,所述方法还包括:
25、通过所述当前解算位置信息对所述前一位置信息进行更新;
26、通过所述当前解算位置信息对应的平均速度对所述前一位置信息对应的运动速度进行更新;
27、通过所述当前位置信息的获取时刻对所述前一位置信息的获取时刻进行更新。
28、可选地,如前述的方法,在所述根据所述平均速度、对所述平均速度进行调节的调节权重、所述前一位置信息以及所述航偏角对所述当前位置信息进行优化后的结果确定为所述目标对象的当前解算位置信息之前,所述方法还包括:
29、确定所述目标对象在历史时间段的历史平均速度,其中,所述历史时间段早于所述前一位置信息的获取时刻;
30、确定出所述历史平均速度与所述平均速度之间的差异程度;
31、基于所述差异程度确定出所述调节权重。
32、根据本技术实施例的另一个方面,还提供了一种rssi定位的位置优化装置,包括:
33、获取模块,用于获取目标对象在当前rssi解算的当前位置信息以及前一位置的前一位置信息;
34、时间差值确定模块,用于确定出所述当前位置信息的获取时刻与所述前一位置信息的获取时刻之间的时间差值;
35、航偏角确定模块,用于基于所述当前位置信息以及所述前一位置信息,确定出航偏角;
36、平均速度确定模块,用于基于所述当前位置信息、所述前一位置信息以及所述时间差值,确定出平均速度;
37、优化模块,用于根据所述平均速度、对所述平均速度进行调节的调节权重、所述前一位置信息以及所述航偏角对所述当前位置信息进行优化后的结果确定为所述目标对象的当前解算位置信息。
38、根据本技术实施例的又一个方面,还提供了一种电子设备,包括处理器、通信接口、存储器和通信总线,其中,处理器、通信接口和存储器通过通信总线完成相互间的通信;其中,存储器,用于存储计算机程序;处理器,用于通过运行所述存储器上所存储的所述计算机程序来执行上述任一实施例中的方法步骤。
39、根据本技术实施例的又一个方面,还提供了一种计算机可读的存储介质,该存储介质中存储有计算机程序,其中,该计算机程序被设置为运行时执行上述任一实施例中的方法步骤。
40、在本技术实施例中,通过确定出平均速度以及航偏角,然后根据平均速度、对平均速度进行调节的调节权重、前一位置信息以及航偏角对所述当前位置信息进行优化后,并将优化后的结果确定为目标对象的当前解算位置信息,从而可以提升对目标对象的定位的准确性,可以提升解算的位置的平滑性和均衡性,从而可以克服相关技术中存在的rssi信号质量不稳定的情况时,解算出的位置就会出现如“z”字抖动、长距离跳跃越等异常现象的技术问题。
- 还没有人留言评论。精彩留言会获得点赞!