一种基于单音测角修正的波束赋型方法与流程
本发明属于无线通信领域,具体涉及一种基于单音测角修正的波束赋型方法。
背景技术:
1、在无人飞行对抗场景中,存在两种必不可少的无人机:指挥无人机和任务无人机。任务无人机突前对抗现场,收集各种现场信息,然后上报给指挥无人机。指挥无人机远离对抗现场,综合分析来自任务无人机的现场信息,产生执行命令,然后下发给任务无人机。由于指挥无人机与任务无人机之间的通信距离很远,比如,可高达30公里,指挥无人机一般采用波束赋型方式与任务无人机通信。
2、指挥无人机和任务无人机在空中高速飞行,比如,任务无人机相对指挥无人机的速度可高达300公里/小时,其相对指挥无人机的空间位置快速变化。因此,指挥无人机需要作为基站,实时调整指向任务无人机的波束方向,以便两者之间的通信链路能保持动中通。
3、这其中,波束赋型是非常重要的。波束赋型是第五代移动通信网络(简称5g)中一个非常重要的课题,也是5g无人飞行对抗场景中一个迫切需要攻克的难题。
4、目前的智能天线波束赋型方案,主要基于aod(angle ofdeparture)来调整或产生波束,有时甚至需采用伺服电机驱动天线阵列旋转以便让波束对准跟踪目标。
5、基于aod来调整或产生波束的实现方法包括如下步骤:
6、步骤1:估计目标用户的方位角和俯仰角;
7、基于跟踪目标反射或回传来的信号,基站(即指挥无人机)采可用经典aod估计算法,比如,music(multiplesignal classification,多重信号分类)算法、esprit(estimation of signal parameters using rotational invariance techniques,借助旋转不变技术估计信号参数)算法等,来得到目标的方位角估计值θ和俯仰角估计值φ。
8、在本实施例中,基站是指部署在指挥无人机上的基站。从广义来讲,基站也可以指部署在其他地方的基站,不一定是指挥无人机。在本实施例中,目标用户是指任务无人机。
9、步骤2:产生赋型矢量,具体包括:
10、步骤21:根据方位角估计值θ,产生第一分矢量w1;第一分矢量w1如下:
11、w1=[w1,0,w1,1,…w1,n-1],
12、其中,i=0,1,2,…,n-1,w1,i表示第一分矢量的第i根天线的权值,d1表示水平面相邻天线间距,n表示水平面阵列天线数。
13、步骤23:根据俯仰角估计值φ,可得第二分矢量w2,第二分矢量w2如下:
14、w2=[w2,0,w2,1,…w2,m-1],
15、其中,i=0,1,2,…,m-1,d2表示垂直面相邻天线间距,m表示垂直面阵列天线数。
16、步骤23:获得赋型矢量w,赋型矢量w如下:
17、
18、其中,表示kronecker积。
19、步骤3:加权,即利用赋型矢量w对数据符号s加权,得到发射信号x;
20、发射信号x为:x=ws,
21、步骤4:信号发射,即把发射信号x从基站的天线阵列发射出去。
22、需说明的是,上述实现方案主要针对有馈源的天线阵列。对无馈源的天线阵列,需根据方位角估计值θ和俯仰角估计值φ利用伺服电机驱动天线阵列机械旋转,以便波束对准跟踪目标。
23、上述智能天线波束赋型方案,存在两个缺点:一是波束不够准确。虽然在los(lineof sight)场景下,aod估计值比较准确,但是在nlos(non-line of sight)场景下,aod估计存在较大误差,因此基于aod估计值产生的波束在nlos场景下不够准确。二是波束方向调整不够快。对无馈源的抛物面天线,根据aod来机械驱动抛物面天线,以便波束对准跟踪目标,这种机械驱动方式导致波束方向调整比较慢,在高速机动场景下,目标用户可能很快飞出波束马上要覆盖的区域,引起波束瞄准失败。对有馈源的平板天线,根据aod产生的权矢量调整各天线的相位来调整波束方向,这种方式波束方向调整快。但是,为了覆盖水平面其它方向,需机械驱动天线阵列旋转,此时仍然存在波束方向调整不够快的问题。
24、当今商用通信网络中的波束赋型方案,主要根据周期性更新的csi(channelstate information,信道状态信息)来产生实时赋型波束。根据周期性更新的csi来产生实时赋型波束的实现方法如下:
25、步骤1:估计csi;
26、对tdd(time division duplexing)系统,基站根据终端发射的探测信号估计csi;对fdd(frequency division duplexing)系统,终端根据下行导频估计csi,然后反馈给基站。用h表示csi信息。
27、步骤2:产生赋型矢量;
28、对h进行奇异值分解,获得对应最大特征值的特征矢量
29、最大特征值对应的索引imax为:
30、imax=argmaxi{λi},
31、[λi,vi]=svd(h),i=1,2,…,l
32、其中,λi表示矩阵h的第i个特征值,vi是对应λi的特征矢量,imax是l个特征值中的最大特征值对应的索引,svd(h)表示对矩阵h进行奇异值分解(singular valuedecomposition),总共有l个特征值。l表示发送端天线数和接收端天线数中的最小值。
33、赋型矢量w为对应最大特征值的特征矢量
34、需注意的是,这步仅针对tdd系统。对fdd系统,终端反馈的csi本质上是赋型矢量索引,基站根据索引查表获得赋型矢量w。
35、步骤3:利用赋型矢量w对数据符号s加权,得到发射信号x;
36、发射信号x为:x=ws;
37、步骤4:把发射信号x从天线阵列发射出去。
38、商用通信网络主要采用平板天线,其波束赋型方案也存在类似的两个缺点:一是波束不够准确。受射频通道误差和csi延迟等非理想因素影响,基于csi产生的波束方向不够准确。在大规模天线场景下,波束越来越窄,波束方向稍有偏差就很容易偏离目标用户,因此,大规模天线场景更容易受非理想因素影响。二是波束方向调整不够快。虽然通过调整各天线信号相位来调整波束方向,在平板天线对应的水平180度范围内,可以快速调整波束方向,但是在无人飞行对抗场景下,为了覆盖水平面其它方向,需机械驱动天线阵列,因此,波束方向调整不够快。
39、综上,现有波束赋型方案,要么存在波束指向不够准确,要么存在波束方向调整不够快速等问题。
40、为了让指挥无人机发出的波束快速而准确地瞄准任务无人机,有必要提出一种基于单音测角修正的波束赋型方法。
技术实现思路
1、本发明的目的在于提供一种用于无人飞行对抗场景的波束赋型方法,其使得波束方向调整快速,且波束指向准确。
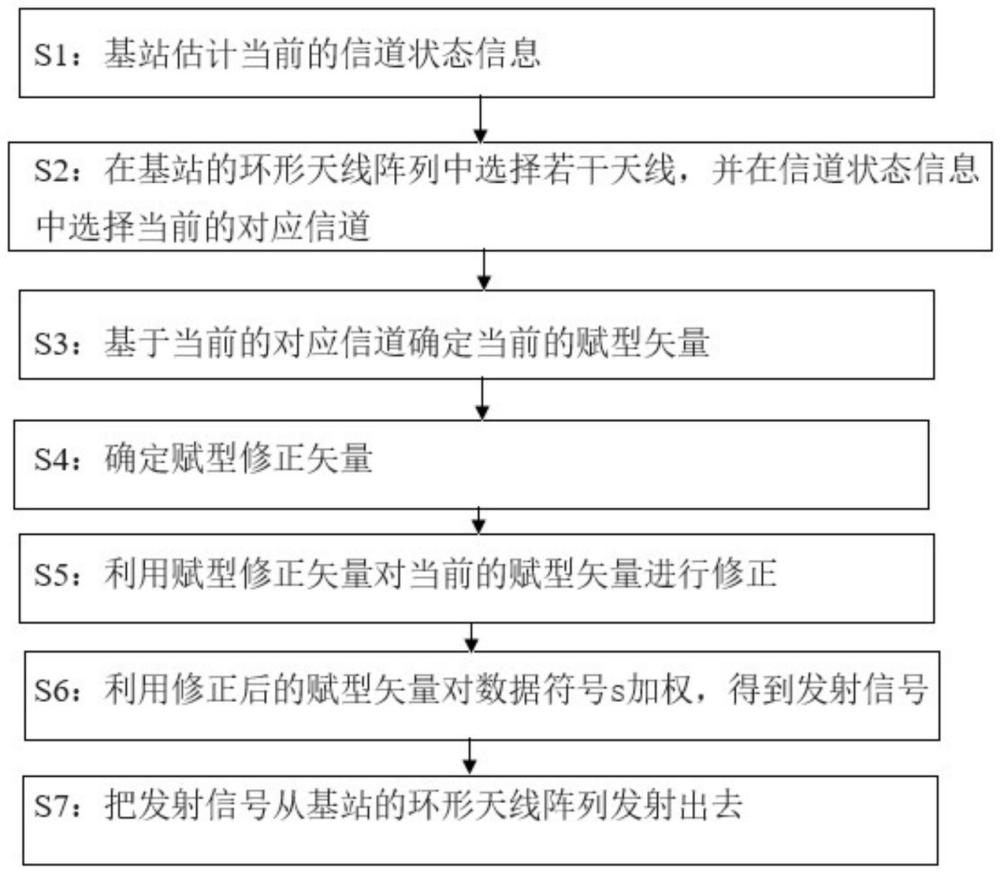
2、为了实现上述目的,本发明提供一种基于单音测角修正的波束赋型方法,包括:
3、s1:基站估计当前的信道状态信息;
4、s2:在基站的环形天线阵列中选择若干天线,并在信道状态信息中选择当前的对应信道;
5、s3:基于当前的对应信道确定当前的赋型矢量;
6、s4:确定赋型修正矢量,具体包括:
7、s41:基于当前的对应信道,确定当前的角速度;
8、s42:基于当前的角速度以及当前下行赋型时刻t2相对于当前赋型计算时刻t1的时间差,确定角增量;
9、s43:根据角增量产生角矢量增量;
10、s44:根据角矢量增量得到赋型修正矢量;
11、s5:利用赋型修正矢量对当前的赋型矢量进行修正;
12、s6:利用修正后的赋型矢量对数据符号加权,得到发射信号;
13、s7:把发射信号从基站的环形天线阵列发射出去。
14、所述步骤s2具体包括:
15、s21:选取功率最大的n列水平天线;
16、s22:选取功率最大的m行垂直天线;
17、s23:根据选取的n列水平天线和m行垂直天线在当前的信道状态信息h中提取当前的对应信道。
18、所述步骤s21具体包括:
19、s211:计算基站每一列水平天线所对应的信号功率;
20、s212:获取功率最大的一列水平天线的索引,作为选择的最优天线;
21、s213:在基站的环形天线阵列中选择剩余n-1列水平天线。
22、在基站的环形天线阵列中选择剩余n-1列水平天线,具体包括:如果n为奇数,则选择最优天线左、右两边各x列天线,x=(n-1)/2;如果n为偶数,则选择最优天线左边列天线,最优天线右边n-1-x1列天线。
23、所述步骤s3具体包括:基于当前的对应信道hstrong,对其进行奇异值分解,获得对应最大特征值的特征矢量将对应最大特征值的特征矢量作为当前的赋型矢量。
24、在所述步骤s41中,当前的角速度包括当前的方位角角速度和当前的俯仰角角速度;
25、在所述步骤s42中,所述角增量包括方位角增量和俯仰角增量;
26、在所述步骤s43中,根据角增量产生的角矢量增量包括方位角矢量增量wθ和俯仰角矢量增量wφ;
27、在所述步骤s44中,赋型修正矢量w1为:
28、
29、其中,表示kronecker积。
30、所述步骤s41具体包括:基于当前赋型计算时刻t1时的估计信道hstrong,利用多重信号分类方法、借助旋转不变技术估计信号参数方法或最大似然算法来估计方位角和俯仰角,分别得到当前的方位角的估计值θ(t1)和当前的俯仰角的估计值φ(t1),然后确定当前的方位角角速度ωθ(t1)和当前的俯仰角角速度ωφ(t1)。
31、优选地,当前的方位角角速度ωθ(t1)为:
32、
33、ωθ(t1)=(1-a)ωθ(t0)+aωθ(t1),
34、其中,ω′θ(t1)是当前的方位角角速度估计值,θ(t0)是上次测量时刻t0估计出的方位角,θ(t1)是当前赋型计算时刻t1估计出的方位角,a是滤波系数,取值范围是[0,1],ωθ(t0)是上次测量时刻t0估计出的角速度,ωθ(t1)是当前赋型计算时刻t1估计出的角速度;
35、当前的俯仰角角速度ωφ(t1)为:
36、
37、ωφ(t1)=(1-a)ω′φ(t0)+aω′φ(t1),
38、其中,ω′φ(t1)是当前的俯仰角角速度估计值,φ(t0)和ωφ(t0)分别是上次测量时刻t0估计出的俯仰角和角速度,φ(t1)和ωφ(t1)分别是当前赋型计算时刻t1估计出的俯仰角和角速度。
39、在所述步骤s5中,修正后的赋型矢量w’为:w’=w·w1。
40、在所述步骤s7中,在当前下行赋型时刻t2,基站发射所述的发射信号。
41、本发明的基于单音测角修正的波束赋型方法由于采用环形天线阵列,因此可在水平面任一方向产生对准目标用户的实时跟踪波束,无需借助伺服电机驱动天线阵列旋转来调整波束方向,从而可快速对准位于任一方向的目标;另外,由于利用无人机的空间角度信息得到赋型修正矢量,对波束进行了修正,因此可减小非理想因素造成的波束方向偏差,提升波束赋型精度。
42、此外,本发明的基于单音测角修正的波束赋型方法采用天线选择方法,对天线和信道进行降维,从而降低复杂度,保证了技术可实现性,能够实现对目标的快速对准。
43、综上所述,相对于现有技术,本发明能提升波束赋型精度和速度。
- 还没有人留言评论。精彩留言会获得点赞!