外呼控制方法、装置、电子设备及可读存储介质与流程
本技术涉及坐席外呼控制,特别是涉及一种外呼控制方法、装置、电子设备及可读存储介质。
背景技术:
1、对于一些保险、银行、电信等服务行业,需要大量的外呼(对外呼出电话)以和客户沟通。在外呼场景下,先使用机器人与接通客户进行通话,以筛选有意向客户,当判断客户具有购买意向再转接人工坐席进行销售。
2、现有技术中,通常采用固定的外呼速度进行外呼,然而呼叫中心每天不同时段内的进线电话的数量分布是不可预知的,在进线电话的数量增长的高峰期,以固定的外呼速度进行外呼,经常出现转人工坐席失败的现象,进而出现大量话单呼损,不仅目标客户的流失,而且也导致智能外呼营销客户转化率低。
技术实现思路
1、有鉴于此,本技术提供了一种外呼控制方法、装置、电子设备及可读存储介质,主要目的在于解决现有技术中固定的外呼速度进行外呼,经常出现转人工坐席失败的现象,进出现大量话单呼损,不仅目标客户的流失,而且也导致智能外呼营销客户转化率低的技术问题。
2、依据本技术第一方面,提供了一种外呼控制方法,该方法包括:
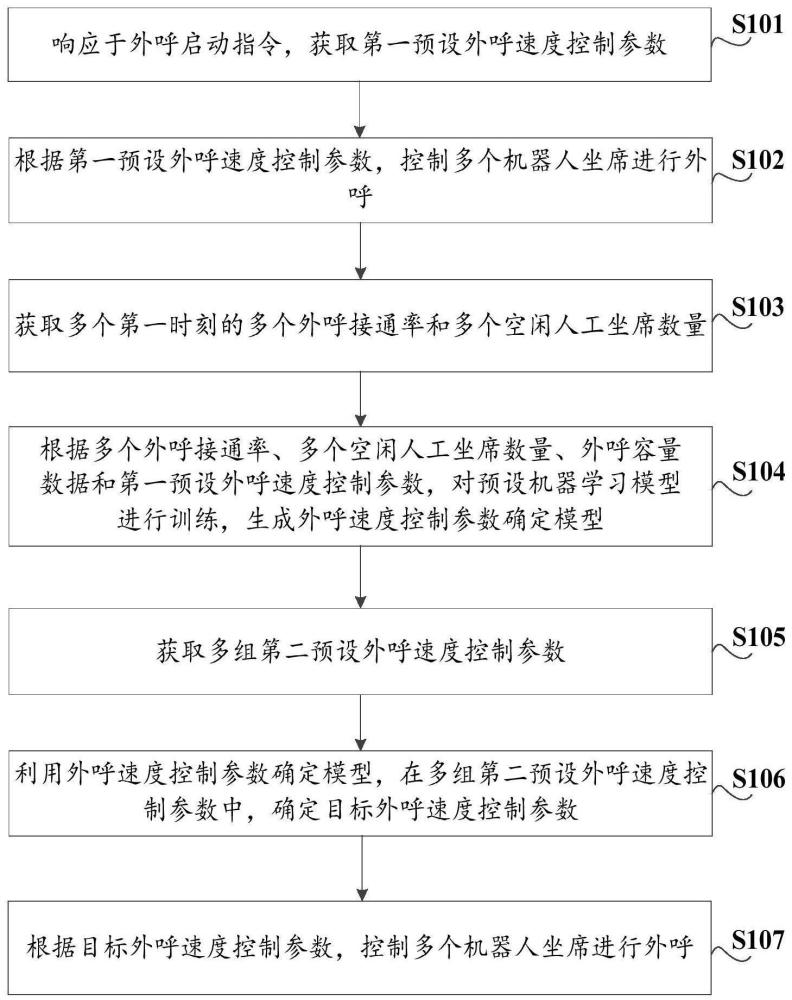
3、响应于外呼启动指令,获取第一预设外呼速度控制参数;
4、根据第一预设外呼速度控制参数,控制多个机器人坐席进行外呼;
5、获取多个第一时刻的多个外呼接通率和多个空闲人工坐席数量;
6、根据多个外呼接通率、多个空闲人工坐席数量、外呼容量数据和第一预设外呼速度控制参数,对预设机器学习模型进行训练,生成外呼速度控制参数确定模型;
7、获取多组第二预设外呼速度控制参数;
8、利用外呼速度控制参数确定模型,在多组第二预设外呼速度控制参数中,确定目标外呼速度控制参数;
9、根据目标外呼速度控制参数,控制多个机器人坐席进行外呼。
10、可选地,根据多个外呼接通率、多个空闲人工坐席数量、外呼容量数据和第一预设外呼速度控制参数,对预设机器学习模型进行训练,生成外呼速度控制参数确定模型的步骤,具体包括:
11、根据每个第一时刻的多个外呼接通率、空闲人工坐席数量、外呼容量数据和第一预设外呼速度控制参数,生成特征数据;
12、根据每个第二时刻的空闲人工坐席数量,生成标签数据;
13、将特征数据和标签数据作为数据集;
14、获取预设机器学习模型的预设模型参数;
15、利用数据集和预设模型参数对预设机器学习模型进行训练,生成训练后的外呼速度控制参数确定模型。
16、可选地,利用数据集和预设模型参数对预设机器学习模型进行训练,生成训练后的外呼速度控制参数确定模型的步骤,具体包括:
17、将数据集分为训练数据集和验证数据集;
18、在模型训练过程中,利用训练数据集和预设模型参数对预设机器学习模型进行训练;
19、利用验证数据集,计算预设机器学习模型的均方误差;
20、在均方误差小于预设误差阈值的情况下,停止模型训练,生成外呼速度控制参数确定模型。
21、可选地,利用外呼速度控制参数确定模型,在多组第二预设外呼速度控制参数中,确定目标外呼速度控制参数的步骤,具体包括:
22、依次将每组第二预设外呼速度控制参数输入外呼速度控制参数确定模型,输出第三时刻对应的预测空闲人工坐席数量;
23、根据多组第二预设外呼速度控制参数的多个预测空闲人工坐席数量和预设空闲人工坐席数量阈值,确定目标外呼速度控制参数。
24、可选地,根据多组第二预设外呼速度控制参数的多个预测空闲人工坐席数量和预设空闲人工坐席数量阈值,确定目标外呼速度控制参数的步骤,具体包括:
25、依次将每个预测空闲人工坐席数量与预设空闲人工坐席数量阈值进行比较;
26、根据比较结果,在多个预测空闲人工坐席数量中,确定出最接近预设空闲人工坐席数量阈值的目标空闲人工坐席数量;
27、将目标空闲人工坐席数量对应的第二预设外呼速度控制参数作为目标外呼速度控制参数。
28、可选地,外呼容量数据包括坐席总数量,该方法还包括:
29、根据坐席总数量,生成预设空闲人工坐席数量阈值。
30、可选地,该方法还包括:
31、根据目标外呼速度控制参数,生成外呼速度调整的提示信息;
32、将提示信息发送至相关人员的终端。
33、依据本技术第二方面,提供了一种外呼控制装置,该装置包括:
34、第一获取模块,用于响应于外呼启动指令,获取第一预设外呼速度控制参数;
35、控制模块,用于根据第一预设外呼速度控制参数,控制多个机器人坐席进行外呼;
36、第二获取模块,用于获取多个第一时刻的多个外呼接通率和多个空闲人工坐席数量;
37、生成模块,用于根据多个外呼接通率、多个空闲人工坐席数量、外呼容量数据和第一预设外呼速度控制参数,对预设机器学习模型进行训练,生成外呼速度控制参数确定模型;
38、第三获取模块,用于获取多组第二预设外呼速度控制参数;
39、确定模块,用于利用外呼速度控制参数确定模型,在多组第二预设外呼速度控制参数中,确定目标外呼速度控制参数;
40、控制模块还用于,根据目标外呼速度控制参数,控制多个机器人坐席进行外呼。
41、依据本技术第三方面,提供了一种电子设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现第一方面中任一项所述方法的步骤。
42、依据本技术第四方面,提供了一种可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现第一方面中任一项所述的方法的步骤。
43、借由上述技术方案,本技术提供的一种外呼控制方法、装置、电子设备及可读存储介质,接收到外呼启动指令后,基于第一预设外呼速度控制参数控制机器人坐席进行外呼。在外呼过程中,将每个第一时刻的外呼接通率和空闲人工坐席数量,结合外呼容量数据和初始外呼速度控制参数,来训练预设机器学习模型,生成外呼速度控制参数确定模型。其后,基于外呼速度控制参数确定模型的预测的每组第二预设外呼速度控制参数对应的空闲人工坐席数量,选取与理想空闲人工坐席数量最贴近的目标外呼速度控制参数。最终,根据确定出的目标外呼速度控制参数控制机器人坐席进行外呼。相较于现有技术中采用固定的外呼速度控制参数进行外呼,存在缺乏灵活性和个性化,无法适应外呼活动的环境和条件的实时变化,使得进线速度无法保证,增加呼损数量,进而导致外呼活动的效果和效率下降的问题。本实施例在外呼过程中,利用实时线上数据训练模型,利用训练后的模型进行提前预测,基于预测结果调整外呼速度控制参数,可以帮助呼叫中心系统及时响应变化,以调整合适外呼速度,可以确保人工坐席有足够的时间和资源处理每个呼叫,使得空闲坐席一直保持在一个较低的水平,同时不增大呼损数量,实现了对呼损的自动控制,能够提供更及时、准确的服务,提升客户满意度。
44、上述说明仅是本技术技术方案的概述,为了能够更清楚了解本技术的技术手段,而可依照说明书的内容予以实施,并且为了让本技术的上述和其它目的、特征和优点能够更明显易懂,以下特举本技术的具体实施方式。
- 还没有人留言评论。精彩留言会获得点赞!