时间同步方法、装置、电子设备以及存储介质与流程
本发明属于车辆,特别是涉及一种时间同步方法、装置、电子设备以及存储介质。
背景技术:
1、自动驾驶,即利用多种类型的传感器获取环境信息(障碍物、位置、道路信息、交通信息),同时基于高性能计算平台进行信息计算处理,然后将计算结果下发给车辆底盘,实现车辆自动行驶的技术。
2、无人驾驶系统稳定运行的基础保障依赖于无人驾驶计算平台内部多计算单元模块的时间同步、计算平台与传感器的时间同步。相关技术中,往往依赖于组合导航接收机在获取到pps+gprmc信号源后,将pps+gprmc信号源分配给不同的设备,但由于pps是一个低功率的脉冲电平信号,所以无法同时给多个设备提供pps信号,这会造成各计算单元模块、控制器以及传感器的时间不同步,造成整个系统的时间相对于标准时间会有偏差,导致无人驾驶的安全性或可靠性收到影响。
技术实现思路
1、为克服相关技术中存在的问题,本发明提供了一种时间同步方法、装置、电子设备以及存储介质。
2、第一方面,本发明提供了一种时间同步方法,应用于车辆,所述车辆包括控制器、激光雷达设备以及相机设备;所述方法包括:
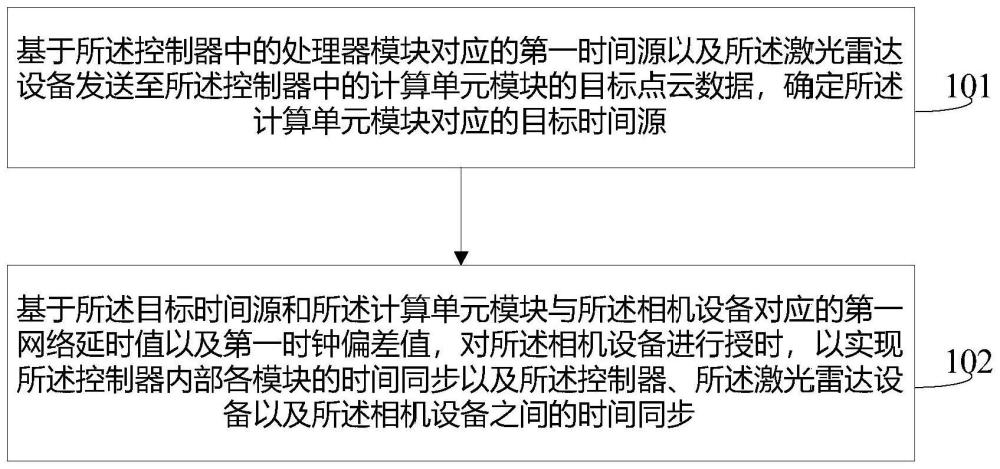
3、基于所述控制器中的处理器模块对应的第一时间源以及所述激光雷达设备发送至所述控制器中的计算单元模块的目标点云数据,,确定所述计算单元模块对应的目标时间源;
4、其中,所述第一时间源是基于所述控制器中的逻辑模块对所述处理器模块进行授时的标准时钟信号确定的,所述第一时间源用于对所述计算单元模块进行时间同步,所述目标点云数据用于对时间同步后的所述计算单元模块进行时间校准;
5、基于所述目标时间源和所述计算单元模块与所述相机设备对应的第一网络延时值以及第一时钟偏差值,对所述相机设备进行授时,以实现所述控制器内部各模块的时间同步以及所述控制器、所述激光雷达设备以及所述相机设备之间的时间同步。
6、可选地,所述方法还包括:
7、在所述处理器模块接收到逻辑模块发送的标准时钟信号的情况下,将所述标准时钟信号对应的第一时间设置为所述处理器模块的第一时间源;
8、将第一时钟信号对应的第二时间设置为所述处理器模块的第二时间源;所述第二时间为所述处理器模块获取到的网络时间;
9、在所述处理器模块的时间模式为第二时间源的情况下,,基于预先确定的所述第一时间与所述第二时间的目标时间差,对所述第二时间源进行校准。
10、可选地,所述逻辑模块用于将接收到的标准时钟信号分发至所述处理器模块以及所述激光雷达设备,以对所述处理器模块以及所述激光雷达设备进行授时。
11、可选地,所述基于所述控制器中的处理器模块对应的第一时间源以及所述激光雷达设备发送至所述控制器中的计算单元模块的目标点云数据,确定所述计算单元模块对应的目标时间源,包括:
12、基于所述处理器模块对应的第一时间源,对所述计算单元模块进行授时,得到第一待校准时间;
13、在所述计算单元模块接收到所述激光雷达设备向所述计算单元模块发送的目标点云数据的情况下,获取所述目标点云数据携带的时间戳信息,并确定所述计算单元模块接收到所述目标点云数据的第一时间信息;
14、在所述计算单元模块接收到所述激光雷达设备发送的第一计算报文的情况下,获取所述第一计算报文中携带的第二时间信息,并确定所述计算单元模块发出第一反馈报文的第三时间信息;
15、其中,所述第一计算报文是所述激光雷达设备在接收到所述第一反馈报文的情况下发出的,所述第二时间信息为所述激光雷达设备接收到所述第一反馈报文的接收时间信息;
16、基于所述时间戳信息、所述第一时间信息、所述第二时间信息以及所述第三时间信息,对所述第一待校准时间进行校准,并确定所述目标时间源。
17、可选地,所述基于所述时间戳信息、所述第一时间信息、所述第二时间信息以及第三时间信息,对所述第一待校准时间进行校准,并确定所述目标时间源,包括:
18、基于所述时间戳信息以及所述第一时间信息的第一差值以及所述第二时间信息以及第三时间信息的第二差值,确定第二网络延时值以及第二时钟偏差值;
19、基于所述第二网络延时值以及所述第二时钟偏差值,对所述第一待校准时间进行校准,得到所述计算单元模块对应的系统时间;
20、将所述计算单元模块对应的系统时间确定为所述目标时间源。
21、可选地,在所述基于所述目标时间源和所述计算单元模块与所述相机设备对应的第一网络延时值以及第一时钟偏差值,对所述相机设备进行授时之前,所述方法还包括:
22、获取第一同步报文的第一发送时间以及第一接收时间;;所述第一同步报文是所述计算单元模块向所述相机设备发送的;
23、获取第二同步报文的第二发送时间以及第二接收时间;;所述第二同步报文是所述相机设备向所述计算单元模块发送的;
24、基于所述第一发送时间以及所述第一接收时间,确定第一对应关系,以及,基于所述第二发送时间以及所述第二接收时间,确定第二对应关系;
25、基于所述第一对应关系以及所述第二对应关系,确定所述第一网络延时值以及所述第一时钟偏差值。
26、可选地,所述基于所述目标时间源和所述计算单元模块与所述相机设备对应的第一网络延时值以及第一时钟偏差值,对所述相机设备进行授时,包括:
27、基于所述目标时间源由所述计算单元模块对所述相机设备进行授时,得到第二待校准时间;
28、所述第二待校准时间用于供所述相机设备基于所述第一网络延时值以及所述第一时钟偏差值,确定所述相机设备的系统时间,以实现所述相机设备与所述控制器以及所述激光雷达设备的时间同步。
29、第二方面,本发明提供了一种时间同步装置,应用于车辆,所述车辆包括控制器、激光雷达设备以及相机设备;所述装置包括:
30、第一确定模块,用于基于所述控制器中的处理器模块对应的第一时间源以及所述激光雷达设备发送至所述控制器中的计算单元模块的目标点云数据,确定所述计算单元模块对应的目标时间源;
31、其中,所述第一时间源是基于所述控制器中的逻辑模块对所述处理器模块进行授时的标准时钟信号确定的,所述第一时间源用于对所述计算单元模块进行时间同步,所述目标点云数据用于对时间同步后的所述计算单元模块进行时间校准;
32、第一授时模块,用于基于所述目标时间源和所述计算单元模块与所述相机设备对应的第一网络延时值以及第一时钟偏差值,对所述相机设备进行授时,以实现所述控制器内部各模块的时间同步以及所述控制器、所述激光雷达设备以及所述相机设备之间的时间同步。
33、第三方面,本发明提供一种电子设备,包括:处理器、存储器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现上述第一方面中任一项所述的时间同步方法。
34、第四方面,本发明提供一种可读存储介质,当所述存储介质中的指令由电子设备的处理器执行时,使得电子设备能够执行如上述第一方面中任一项实施例中的时间同步方法中的步骤。
35、本发明实施例中,基于控制器中的处理器模块对应的第一时间源以及激光雷达设备发送至计算单元模块的目标点云数据,确定计算单元模块对应的目标时间源,可以实现对计算单元模块的授时,同时,由于第一时间源是基于标准时钟信号确定的,且目标时间源是基于第一时间源进行时间同步以及基于目标点云数据进行校准确定的,这样可以使得校准后的计算单元模块的目标时间源与标准时钟信号保持一致,确保计算单元模块的目标时间源的精准性。进一步的,通过基于目标时间源以及第一网络延时值以及第一时钟偏差值对相机设备进行授时,由于考虑了网络延时以及时钟偏差带来的时钟误差,使得经过授时后的相机设备的系统时间与计算单元模块的目标时间源保持一致,也就是说,控制器内部各模块,即处理器模块以及计算单元模块,实现了时间同步,并且,控制器与激光雷达设备以及相机设备之间也实现了时间同步,确保了控制器、激光雷达设备以及相机设备的时间一致性以及精准性。
- 还没有人留言评论。精彩留言会获得点赞!