基站信号覆盖范围的确定方法、确定装置和电子设备与流程
本发明涉及计算机,具体而言,涉及一种基站信号覆盖范围的确定方法、确定装置和电子设备。
背景技术:
1、ais(automatic identification system,船舶自动识别系统)广泛用于航海领域,用于实时监测船舶的位置、航向、航速和其他相关信息。ais系统由船舶上的ais发送器和基站组成,基站负责接收和处理来自船舶的ais信号,以实现船舶的跟踪、安全管理和交通监督。
2、在实际应用中,ais基站的覆盖范围是一个关键问题。在ais基站的覆盖范围内,船舶的位置和状态能够被基站准确地接收和记录,而在覆盖范围外的船舶信息则无法被捕获。因此,准确计算ais基站的覆盖范围对于海上安全、交通管理和应急响应至关重要。
3、传统的ais基站覆盖范围计算方法通常基于固定的信号传播模型和信号损耗模型,这些方法依赖气象数据和海洋环境数据,由于气象和海洋环境复杂,往往难以提供准确地计算覆盖范围。此外,传统方法通常忽略了船舶轨迹数据所包含的大量信息,未能充分利用这些数据来提高覆盖范围计算的精度。
4、因此,如何提出一种能够提高ais基站信号覆盖范围计算精度的确定方法就成为目前亟待解决的问题。
技术实现思路
1、为解决上述技术问题,本技术提出了一种基站信号覆盖范围的确定方法,通过对船舶的ais轨迹数据进行轨迹聚类,从而提高ais基站信号覆盖范围的计算精度。
2、为此,本发明的第一个目的在于提供一种基站信号覆盖范围的确定方法。
3、本发明的第二个目的在于提供一种基站信号覆盖范围的确定装置。
4、本发明的第三个目的在于提供一种存储介质。
5、本发明的第四个目的在于提供一种电子设备。
6、本发明的第五个目的在于提供一种电子设备。
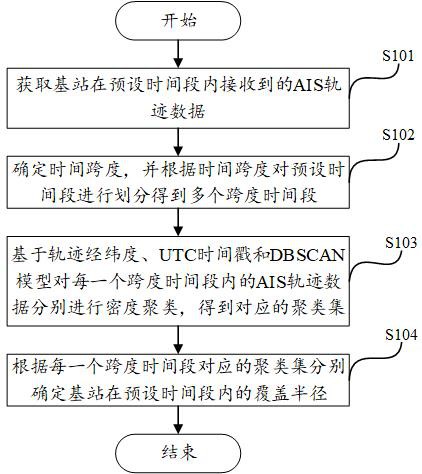
7、有鉴于此,本发明第一方面的技术方案提供了一种基站信号覆盖范围的确定方法,包括:获取基站在预设时间段内接收到的ais轨迹数据,ais轨迹数据包括utc(universal timecoordinated,世界统一时间)时间戳和轨迹经纬度;确定时间跨度,并根据时间跨度对预设时间段进行划分得到多个跨度时间段;基于轨迹经纬度、utc时间戳和dbscan(density based spatial clustering of applications with noise,基于密度的聚类算法)模型对每一个跨度时间段内的ais轨迹数据分别进行密度聚类,得到对应的聚类集;根据每一个跨度时间段对应的聚类集分别确定基站在预设时间段内的覆盖半径。
8、根据本发明提出的基站信号覆盖范围的确定方法,首先获取基站的数据信息,其中,基站的数据信息包括基站的名称和基站的坐标经纬度,也即确定需要计算信号覆盖范围的基站;然后获取该基站在预设时间段内接收到的ais轨迹数据,其中,预设时间段是可设置的,可以是一个月、一个星期或一天,具体可按照实际情况设置,同时,ais轨迹数据包括utc时间戳和轨迹经纬度,utc时间戳,也即获取的ais轨迹数据既包括时间信息,也包括轨迹点的经纬度信息。之后确定时间跨度,并根据时间跨度对预设时间段进行划分得到多个跨度时间段,也就是说,对预设时间段进行划分得到多个跨度时间段,需要说明的是,计算基站的信号覆盖范围受气象条件影响,不同时间段的气象条件不一致,通过对时间段的拆分来避免天气对计算精度的影响。再根据轨迹经纬度和utc时间戳,以及dbscan模型对每一个跨度时间段内的ais轨迹数据分别进行密度聚类,得到每一个跨度时间段内的轨迹聚类结果,也即聚类集。最后,根据每一个跨度时间段对应的聚类集分别确定基站在预设时间段内的覆盖半径。本发明的方法能够利用船舶轨迹数据所包含的大量信息,来计算ais基站信号的覆盖范围,同时,dbscan模型可以有效地应对复杂的海洋环境和不规则轨迹数据分布,帮助基站识别并聚类接收到的轨迹数据,从而更准确地计算出基站的信号覆盖范围,进而提高对海上航行的监督和管理,提高海上航线的安全性。
9、可选地,一个聚类集包括多个聚类簇,根据每一个跨度时间段对应的聚类集分别确定基站在预设时间段内的覆盖半径的步骤包括:确定每个聚类集中的每一个聚类簇到基站的最小距离和最大距离;根据每个聚类集确定出的多个最小距离和多个最大距离确定基站在对应的跨度时间段内的覆盖半径。
10、也就是说,本发明中涉及的一个聚类集一般包括多个聚类簇,可以理解的是,在预设时间段内分为多个跨度时间段,一个跨度时间段对应一个聚类集,也即一个跨度时间段内的数据点会形成多个聚类簇。以其中一个跨度时间段来说,将基站接收到的ais轨迹数据分成若干个簇,其中每一个聚类簇中有若干个数据点,对于其中一个聚类簇来说,具有一个距离基站最远的数据点和一个距离基站最近的数据点,由此可以确定某个聚类簇与基站的最小距离和最大距离,并且进一步根据多个聚类簇中与基站对应的最小距离和最大距离确定在该跨度时间段内的基站信号覆盖半径。同理,所有跨度时间段内的基站信号覆盖范围都可以根据上述方法确定,各个跨度时间段内的基站信号覆盖范围相互独立,互不影响。
11、可选地,根据每个聚类集确定出的多个最小距离和多个最大距离确定基站在对应的跨度时间段内的覆盖半径的步骤包括:对跨度时间段内的多个聚类簇按照最小距离进行升序排列;按照从小到大的排列顺序对当前聚类簇与基站的最大距离与下一个聚类簇与基站的最小距离进行比较;在当前聚类簇与基站的最大距离大于或等于下一个聚类簇与基站的最小距离时,将下一个聚类簇作为当前聚类簇;在当前聚类簇与基站的最大距离小于下一个聚类簇与基站的最小距离时,确定基站在跨度时间段内的覆盖半径为当前聚类簇到基站的最大距离;或在当前聚类簇的排序为最后一个聚类簇时,确定基站的覆盖半径为当前聚类簇到基站的最大距离。
12、本发明中根据多个聚类簇的最小距离和最大距离确定在该跨度时间段内的基站信号覆盖半径,以其中一个跨度时间段来看,可以理解为,先对该跨度时间段内的多个聚类簇按照与基站的最小距离做升序排列,然后按照从小到大的排列顺序对当前聚类簇的最大距离与下一个聚类簇与基站的最小距离进行比较。
13、具体来说,在当前聚类簇与基站的最大距离大于或等于下一个聚类簇与基站的最小距离时,将下一个聚类簇作为当前聚类簇。也就是说,在当前聚类簇和下一个聚类簇与基站的距离是连续的情况下,此时说明当前聚类簇与基站的最大距离并不是基站的信号覆盖半径,下一个聚类簇内的数据点仍然在基站的信号覆盖范围内,此时将下一个聚类簇作为当前聚类簇重复进行数值的比较。直至在当前聚类簇与基站的最大距离小于下一个聚类簇与基站的最小距离时,确定基站在该跨度时间段内的覆盖半径为当前聚类簇到基站的最大距离。也就是说,在连续比较之后,直至出现当前聚类簇与基站的最大距离小于下一个聚类簇与基站的最小距离时,此时说明当前聚类簇与下一个聚类簇的数据点不连续,确定基站在该跨度时间段内的覆盖半径为当前聚类簇与基站的最大距离,可以理解的是,下一个聚类簇的数据点存在异常,在船舶与基站的通讯过程中,可能存在数据丢失的情况,因此,确定基站在该跨度时间段内的覆盖半径为当前聚类簇与基站的最大距离。本发明提出的基站信号覆盖范围的确定方法,能够排除异常轨迹点,避免异常轨迹点对计算结果的影响,保证了计算结果的鲁棒性。
14、可选地,基于轨迹经纬度、utc时间戳和dbscan模型对每一个跨度时间段内的ais轨迹数据分别进行密度聚类,得到对应的聚类集的步骤包括:确定每一个跨度时间段内的ais轨迹数据中的多个核心点;根据多个核心点和邻域半径构建多个聚类簇;对聚类簇进行去噪声点处理。
15、在聚类过程中,先根据跨度时间段和utc时间戳确定在该跨度时间段内的所有数据点,然后根据轨迹经纬度计算数据点之间的距离,并且确定在每一个跨度时间段内的ais轨迹数据中的多个核心点,其中,一个跨度时间段对应有一个或多个核心点,具体要看在该跨度时间段内的数据点被划分为几个簇,然后根据核心点和邻域半径构建多个聚类簇,最后对数据点进行去噪声处理,dbscan模型还具有噪声容忍性,也即它能够有效地处理孤立的数据点或异常点,而不会将它们错误地分配给任意一个簇,这在ais轨迹数据中尤为重要,因为某些轨迹点可能是由于信号干扰、数据错误或其他原因而产生的异常点,排除这些异常点能够进一步提高计算结果的准确性。
16、可选地,确定每一个跨度时间段内的ais轨迹数据中的多个核心点的步骤包括:设置dbscan模型的参数,参数包括邻域半径和邻域内的最小数据点数;按照以下步骤遍历每一个ais轨迹数据中的数据点:根据邻域半径确定数据点的邻域,并计算邻域内的数据点数;当邻域内的数据点数大于或等于最小数据点数时,确定数据点为核心点;或当邻域内的数据点数小于最小数据点数,且数据点到任意一个核心点的密度相连时,确定数据点为边界点。
17、在确定核心点的过程中,首先设置dbscan模型的参数,也即设置邻域半径和邻域内的最小数据点数,然后需要遍历每一个ais轨迹数据中的数据点,判断数据点是核心点还是边界点。具体来说,以数据点为中心的邻域半径的范围内,计算邻域内的所有数据点数,当邻域内的数据点数大于或等于设置的最小数据点数时,确定当前数据点为核心点;反之,当邻域内的数据点数小于设置的最小数据点数,且当前数据点到任意一个核心点的密度相邻时,确定当前数据点为边界点。由此可以确定出ais轨迹数据中的核心点和边界点。采用dbscan模型无需设置核心点的个数,而是根据数据点和设置的参数自动确定出核心点的个数,简单快捷。
18、可选地,对聚类簇进行去噪声点处理的步骤包括:当邻域内的数据点数小于最小数据点数,且数据点到任意一个核心点的密度不相连时,确定数据点为噪声点;对聚类簇进行去噪声点处理。
19、采用dbscan模型确定数据点的类型时,数据点还有可能是噪声点,当邻域内的数据点数小于最小数据点数,且数据点到任意一个核心点的密度不相连时,确定当前数据点为噪声点。在该数据点不是核心点的基础上,且该数据点不会被划分到任意一个簇中时,确定当前数据点为噪声点,在确定噪声点之后,可以对这些噪声点进行去噪声处理,从而利用dbscan模型去除异常点,更准确地计算出信号覆盖范围。
20、本发明第二方面的技术方案提供了一种基站信号覆盖范围的确定装置,包括:获取模块,用于获取基站在预设时间段内接收到的ais轨迹数据,ais轨迹数据包括utc时间戳和轨迹经纬度;划分模块,用于确定时间跨度,并根据时间跨度对预设时间段进行划分得到多个跨度时间段;聚类模块,用于基于轨迹经纬度、utc时间戳和dbscan模型对每一个跨度时间段内的ais轨迹数据分别进行密度聚类,得到对应的聚类集;确定模块,用于根据每一个跨度时间段对应的聚类集分别确定基站在预设时间段内的覆盖半径。
21、根据本发明提出的基站信号覆盖范围的确定装置,首先通过获取模块获取基站的数据信息,其中,基站的数据信息包括基站的名称和基站的坐标经纬度,也即确定需要计算信号覆盖范围的基站;然后通过获取模块获取该基站在预设时间段内接收到的ais轨迹数据,其中,预设时间段是可设置的,可以是一个月、一个星期或一天,具体可按照实际情况设置,同时,ais轨迹数据包括utc时间戳和轨迹经纬度,utc时间戳,也即获取的ais轨迹数据既包括时间信息,也包括轨迹点的经纬度信息。之后确定时间跨度,划分模块根据时间跨度对预设时间段进行划分得到多个跨度时间段,也就是说,划分模块对预设时间段进行划分得到多个跨度时间段,需要说明的是,计算基站的信号覆盖范围受气象条件影响,不同时间段的气象条件不一致,通过对时间段的拆分来避免天气对计算精度的影响。聚类模块通过dbscan模型对每一个跨度时间段内的带有轨迹经纬度和utc时间戳的ais轨迹数据分别进行密度聚类,得到每一个跨度时间段内的轨迹聚类结果,也即聚类集。最后,确定模块根据每一个跨度时间段对应的聚类集分别确定基站在预设时间段内的覆盖半径。本发明的方法能够利用船舶轨迹数据所包含的大量信息,来计算ais基站信号的覆盖范围,同时,dbscan模型可以有效地应对复杂的海洋环境和不规则轨迹数据分布,帮助基站识别并聚类接收到的轨迹数据,从而更准确地计算出基站的信号覆盖范围,进而提高对海上航行的监督和管理,提高海上航线的安全性。
22、本发明的第三方面提出了一种存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现第一方面提供的基站信号覆盖范围的确定方法的步骤。
23、本发明技术方案中的存储介质实现如本发明第一方面提供的基站信号覆盖范围的确定方法的步骤,因此其具有如本发明第一方面提供的基站信号覆盖范围的确定方法的步骤的全部有益效果,在此不再赘述。
24、本发明的第四方面提出了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,处理器执行计算机程序时实现第一方面提供的基站信号覆盖范围的确定方法的步骤。
25、本发明技术方案中的电子设备实现如本发明第一方面提供的基站信号覆盖范围的确定方法的步骤,因此其具有如本发明第一方面提出的基站信号覆盖范围的确定方法的全部有益效果,在此不再赘述。
26、本发明的第五方面提出了一种电子设备,包括如第二方面的基站信号覆盖范围的确定装置,和/或如第三方面提出的存储介质。
27、本发明技术方案中的电子设备包括第二方面的基站信号覆盖范围的确定装置,和/或第三方面提出的存储介质。因此其具有第二方面提出的基站信号覆盖范围的确定装置,和/或第三方面提出的存储介质的全部有益效果,在此不再赘述。
28、本发明的附加方面和优点将在下面的描述部分中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!