一种云台摄像设备的转动控制方法、系统、设备及介质与流程
本技术涉及智能安防监控,特别涉及一种云台摄像设备的转动控制方法、系统、设备及介质。
背景技术:
1、近年来,随着科学技术的发展,安防监控应用越来越广泛。通过设置摄像监控设备,可以实现对现场的实时监控,以及,通过将ai目标检测类算法应用于安防监控,可以实时实现对异常状态的自动报警,可以有效提高安防监控的智能性和及时性。
2、目前,传统的安防监控方案注释通过一个固定摄像头对照一个场景进行拍摄,在使用ai目标检测类算法进行分析时,受限于固定摄像头的检测范围和检测角度,检测可信度较低;还有,市面上存在小部分的云台摄像头,这些云台摄像头带有旋转功能,可由用户操控或自动巡检四周场景,但现有的云台摄像头转动后,目标检测区域就会发生变动,无法对所需的区域或者正确区域进行目标检测,目标检测的有效性不高。另外,当用户在结束调用云台摄像头后,往往需要用户对云台摄像头的摄像区域进行调整,该调整方式较为复杂,便捷性偏低。
3、因此,现有技术存在的问题还亟需解决和优化。
技术实现思路
1、为解决上述技术问题的至少之一,本技术提供了一种云台摄像设备的转动控制方法、系统、设备及介质,其中,该转动控制方法可以有效提高目标检测的有效性和可信度,以及,有效提高摄像区域调整的便捷性。
2、根据本技术的第一方面,提供了一种云台摄像设备的转动控制方法,包括:
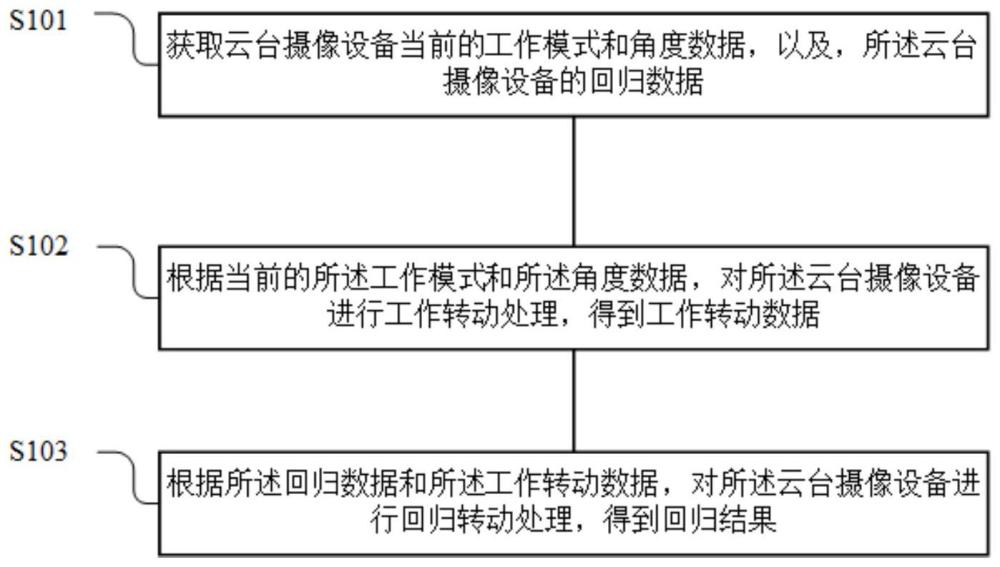
3、获取云台摄像设备当前的工作模式和角度数据,以及,所述云台摄像设备的回归数据,所述回归数据用于记录所述云台摄像设备的复位角度;
4、根据当前的所述工作模式和所述角度数据,对所述云台摄像设备进行工作转动处理,得到工作转动数据;
5、根据所述回归数据和所述工作转动数据,对所述云台摄像设备进行回归转动处理,得到回归结果。
6、进一步地,在本技术实施例中,所述根据当前的所述工作模式和所述角度数据,对所述云台摄像设备进行工作转动处理,得到所述工作转动数据,包括:
7、若当前的所述工作模式为用户控制模式,则获取来自用户的操作指令;
8、对所述操作指令进行指令转换处理,得到指令转动参数;
9、根据所述指令转动参数和当前的所述角度数据,对所述云台摄像设备进行指令转动处理,得到所述工作转动数据。
10、进一步地,在本技术实施例中,所述回归数据包括第一回归条件和第一目标角度数据,所述工作转动数据包括指令数据和指令角度数据,所述根据所述回归数据和所述工作转动数据,对所述云台摄像设备进行回归转动处理,得到回归结果,包括:
11、根据所述第一回归条件,对所述指令数据进行状态判断处理,得到第一控制状态信息,所述第一控制状态信息用于记录用户终端与所述云台摄像设备的连接状态,以及,所述用户终端向所述云台摄像设备下发的状态控制数据;
12、当所述第一控制状态信息为复位断开,则根据所述第一目标角度数据,对所述指令角度数据进行第一转动参数确定处理,得到第一回归转动参数;
13、根据所述第一回归转动参数,对所述云台摄像设备进行第一回归处理,得到所述回归结果。
14、进一步地,在本技术实施例中,所述根据当前的所述工作模式和所述角度数据,对所述云台摄像设备进行工作转动处理,得到工作转动数据,包括:
15、若当前的所述工作模式为跟拍模式,则获取来自跟拍目标的图像数据;
16、对所述图像数据进行目标检测处理,得到目标检测结果;
17、根据所述目标检测结果和当前的所述角度数据,对所述云台摄像设备进行跟拍转动处理,得到所述工作转动数据。
18、进一步地,在本技术实施例中,所述根据回归数据包括第二回归条件和第二目标角度数据,所述工作转动数据包括跟拍区域数据和跟拍角度数据,所述根据所述回归数据和所述工作转动数据,对所述云台摄像设备进行回归转动处理,得到回归结果,包括:
19、根据所述第二回归条件,对所述跟拍区域数据进行区域判断处理,得到第二控制区域信息,所述第二控制区域信息用于记录所述跟拍目标在所述云台摄像设备跟拍区域的区域状态;
20、当所述第二控制区域信息为目标丢失,则根据所述第二目标角度数据,对所述跟拍角度数据进行第二转动参数确定处理,得到第二回归转动参数;
21、根据所述第二回归转动参数,对所述云台摄像设备进行第二回归处理,得到所述回归结果。
22、进一步地,在本技术实施例中,所述根据当前的所述工作模式和所述角度数据,对所述云台摄像设备进行工作转动处理,得到工作转动数据,包括:
23、若当前的所述工作模式为自主巡检模式,则获取所述云台摄像设备当前的巡检信息,所述巡检信息用于记录所述云台摄像设备的巡检区域和巡检时间;
24、根据所述巡检信息和当前的所述角度数据,对所述云台摄像设备进行巡检转动处理,得到所述工作转动数据。
25、进一步地,在本技术实施例中,所述转动控制方法还包括:
26、获取回归区域数据和预设的目标区域数据,所述回归区域数据为所述云台摄像设备在回归转动后,拍摄到的图像数据;
27、对所述回归区域数据和所述目标区域数据进行区域验证处理,得到区域验证结果;
28、根据所述区域验证结果,对所述回归结果进行更新,得到更新后的回归结果。
29、根据本技术的第二方面,提供了一种云台摄像设备的转动控制系统,包括:
30、获取单元,用于获取云台摄像设备当前的工作模式和角度数据,以及,所述云台摄像设备的回归数据,所述回归数据用于记录所述云台摄像设备的复位角度;
31、转动单元,用于根据当前的所述工作模式和所述角度数据,对所述云台摄像设备进行工作转动处理,得到工作转动数据;
32、回归单元,用于根据所述回归数据和所述工作转动数据,对所述云台摄像设备进行回归转动处理,得到回归结果。
33、根据本技术的第三方面,提供了一种计算机设备,包括:
34、至少一个处理器;
35、至少一个存储器,用于存储至少一个程序;
36、当所述至少一个程序被所述至少一个处理器执行,使得所述至少一个处理器实现如上述方面所述的云台摄像设备的转动控制方法。
37、根据本技术的第四方面,提供了一种计算机可读存储介质,其中存储有处理器可执行的程序,所述处理器可执行的程序在由所述处理器执行时用于实现如上述方面所述的云台摄像设备的转动控制方法。
38、本技术实施例提供的技术方案的有益效果是:
39、本技术提供了一种云台摄像设备的转动控制方法、系统、设备及介质,其中,该转动控制方法通过获取云台摄像设备当前的工作模式和角度数据,以及,所述云台摄像设备的回归数据,所述回归数据用于记录所述云台摄像设备的复位角度;根据当前的所述工作模式和所述角度数据,对所述云台摄像设备进行工作转动处理,得到工作转动数据;根据所述回归数据和所述工作转动数据,对所述云台摄像设备进行回归转动处理,得到回归结果。该转动控制方法可以有效提高目标检测的有效性和可信度,以及,有效提高摄像区域调整的便捷性。
- 还没有人留言评论。精彩留言会获得点赞!