基于无人机的网络基站生成方法、装置、设备和存储介质与流程
本技术涉及应急通信领域,尤其涉及一种基于无人机的网络基站生成方法、装置、设备和存储介质。
背景技术:
1、随着无人机技术的不断发展和进步,无人机自组网作为一种新兴的通信技术逐渐崭露头角。传统的无人机通信系统通常采用点对点的通信方式,限制了无人机之间的信息共享和协同能力。而无人机自组网通过将多台无人机组成一个动态的网络结构,实现信息的快速传输、资源共享和任务协同。
2、然而,尽管无人机自组网技术已经取得了显著的进步,但仍存在一些亟待解决的问题。其中最显著的是由无人机的电量续航引发的网络状态不稳定问题。目前,大多数无人机的电池容量存在局限性,无法满足长时间飞行的需求。因此,一旦电量耗尽,无人机将无法继续执行任务,甚至可能引发安全风险,如坠机等。这种情况对无人机的网络稳定性产生了重大影响,限制了其在应急通信和灾害救援等领域的应用效果。
3、因此,如何解决无人机所形成的网络状态不稳定的问题,并解决无人机的电量续航问题,从而提高无人机的网络稳定性并提高整个无人机自组网的运行效率,是目前亟需解决的问题。
技术实现思路
1、本技术提供一种基于无人机的网络基站生成方法、装置、设备和存储介质,用以解决现有技术中存在的无人机所形成的网络状态不稳定以及无人机的电量续航的问题。
2、第一方面,本技术提供一种基于无人机的网络基站生成方法,该方法。
3、包括:
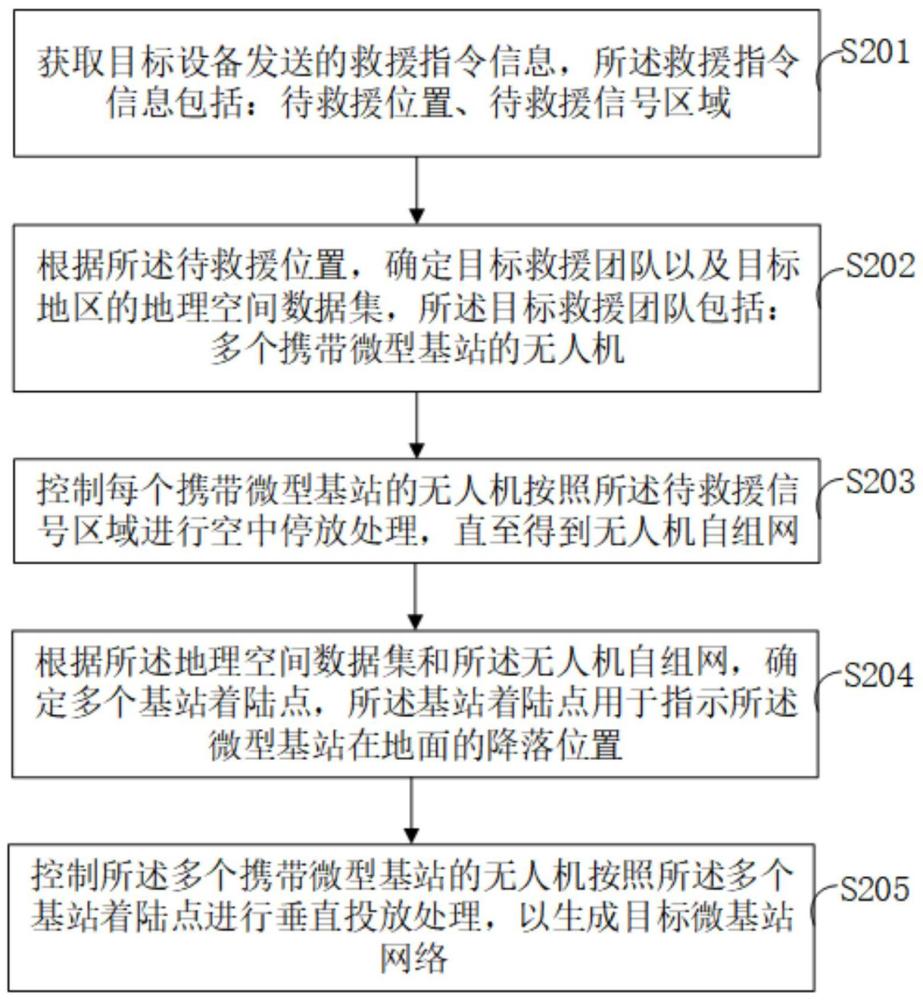
4、获取目标设备发送的救援指令信息,所述救援指令信息包括:待救援位置、待救援信号区域;
5、根据所述待救援位置,确定目标救援团队以及目标地区的地理空间数据集,所述目标救援团队包括:多个携带微型基站的无人机;
6、控制每个携带微型基站的无人机按照所述待救援信号区域进行空中停放处理,直至得到无人机自组网;
7、根据所述地理空间数据集和所述无人机自组网,确定多个基站着陆点,所述基站着陆点用于指示所述微型基站在地面的降落位置;
8、控制所述多个携带微型基站的无人机按照所述多个基站着陆点进行垂直投放处理,以生成目标微基站网络。
9、可选的,所述根据所述待救援位置,确定目标救援团队,包括:
10、获取多个候选救援团队,并根据所述多个候选救援团队和所述待救援位置,确定多个候选救援距离;
11、对所述多个候选救援距离进行解析处理,得到目标救援距离;
12、根据所述目标救援距离,确定所述目标救援团队。
13、可选的,所述控制每个携带微型基站的无人机按照所述待救援信号区域进行空中停放处理,直至得到无人机自组网,包括:
14、根据所述每个携带微型基站的无人机和所述待救援信号区域,确定多个空中悬停位置;
15、控制所述每个携带微型基站的无人机按照所述多个空中悬停位置依次进行停放,直至得到所述无人机自组网。
16、可选的,所述控制所述每个携带微型基站的无人机按照所述多个空中悬停位置依次进行停放,直至得到所述无人机自组网之后,所述方法还包括:
17、控制所述每个携带微型基站的无人机感知所述目标地区的状态信息,所述状态信息包括:用户信息、网络信道信息;
18、根据所述用户信息和所述网络信道信息,对所述多个空中悬停位置进行调整处理,得到新的多个空中悬停位置;
19、控制所述每个携带微型基站的无人机按照所述新的多个空中悬停位置依次进行停放,直至得到新的无人机自组网。
20、可选的,所述根据所述用户信息和所述网络信道信息,对所述多个空中悬停位置进行调整处理,得到新的多个空中悬停位置,包括:
21、对所述用户信息进行聚类处理,得到密集用户区域和稀疏用户区域,并对所述网络信道信息进行网络监测处理,得到稳定网络信道;
22、根据所述密集用户区域、所述稀疏用户区域和所述稳定网络信道,确定密集区域网络信道和稀疏区域网络信道;
23、根据所述密集区域网络信道和所述稀疏网络区域信道,对所述多个空中悬停位置进行调整处理,得到新的空中悬停位置。
24、可选的,所述状态信息还包括:环境信息,所述根据所述地理空间数据集和所述无人机自组网,确定多个基站着陆点,包括:
25、根据所述无人机自组网、所述用户信息、所述网络信道信息、所述环境信息以及所述地理空间数据集,生成所述目标地区的三维环境模型;
26、对所述三维环境模型进行解析处理,得到所述多个基站着陆点。
27、可选的,所述控制所述多个携带微型基站的无人机按照所述多个基站着陆点进行垂直投放处理之后,所述方法还包括:
28、获取所述每个携带微型基站的无人机的携带状态;
29、在所述携带状态为未携带状态时,控制所述每个携带微型基站的无人机返回地面控制站。
30、第二方面,本技术提供一种基于无人机的网络基站生成装置,该装置包括:
31、获取模块,用于获取目标设备发送的救援指令信息,所述救援指令信息包括:待救援位置、待救援信号区域;
32、确定模块,用于根据所述待救援位置,确定目标救援团队以及目标地区的地理空间数据集,所述目标救援团队包括:多个携带微型基站的无人机;
33、控制模块,用于控制每个携带微型基站的无人机按照所述待救援信号区域进行空中停放处理,直至得到无人机自组网;
34、所述确定模块,还用于根据所述地理空间数据集和所述无人机自组网,确定多个基站着陆点,所述基站着陆点用于指示所述微型基站在地面的降落位置;
35、所述控制模块,还用于控制所述多个携带微型基站的无人机。
36、可选的,所述获取模块,还用于获取多个候选救援团队;
37、所述确定模块,还用于根据所述多个候选救援团队和所述待救援位置,确定多个候选救援距离;
38、所述装置还包括:处理模块;
39、所述处理模块,用于对所述多个候选救援距离进行解析处理,得到目标救援距离;
40、所述确定模块,具体用于根据所述目标救援距离,确定所述目标救援团队。
41、可选的,所述确定模块,还用于据所述每个携带微型基站的无人机和所述待救援信号区域,确定多个空中悬停位置;
42、所述控制模块,具体用于控制所述每个携带微型基站的无人机按照所述多个空中悬停位置依次进行停放,直至得到所述无人机自组网。
43、可选的,所述控制模块,还用于控制所述每个携带微型基站的无人机感知所述目标地区的状态信息,所述状态信息包括:用户信息、网络信道信息;
44、所述处理模块,还用于根据所述用户信息和所述网络信道信息,对所述多个空中悬停位置进行调整处理,得到新的多个空中悬停位置;
45、所述控制模块,具体用于控制所述每个携带微型基站的无人机按照所述新的多个空中悬停位置依次进行停放,直至得到新的无人机自组网。
46、可选的,所述处理模块,还用于对所述用户信息进行聚类处理,得到密集用户区域和稀疏用户区域,并对所述网络信道信息进行网络监测处理,得到稳定网络信道;
47、所述确定模块,还用于根据所述密集用户区域、所述稀疏用户区域和所述稳定网络信道,确定密集区域网络信道和稀疏区域网络信道;
48、所述处理模块,具体用于根据所述密集区域网络信道和所述稀疏网络区域信道,对所述多个空中悬停位置进行调整处理,得到新的空中悬停位置。
49、可选的,所述装置还包括:生成模块;
50、所述生成模块,用于根据所述无人机自组网、所述用户信息、所述网络信道信息、所述环境信息以及所述地理空间数据集,生成所述目标地区的三维环境模型;
51、所述处理模块,具体用于对所述三维环境模型进行解析处理,得到所述多个基站着陆点。
52、可选的,所述获取模块,还用于获取所述每个携带微型基站的无人机的携带状态;
53、所述控制模块,还用于在所述携带状态为未携带状态时,控制所述每个携带微型基站的无人机返回地面控制站。
54、第三方面,本技术提供一种基于无人机的网络基站生成设备,包括:
55、存储器;
56、处理器;
57、其中,所述存储器存储计算机执行指令;
58、所述处理器执行所述存储器存储的计算机执行指令,以实现如上述第一方面及第一方面各种可能的实现方式所述的基于无人机的网络基站生成方法。
59、第四方面,本技术提供一种计算机存储介质,其上存储有计算机执行指令,所述计算机执行指令被处理器执行以实现如上述第一方面及第一方面各种可能的实现方式所述的基于无人机的网络基站生成方法。
60、本技术提供的基于无人机的网络基站生成方法,在得到了与救援指令信息对应的目标救援团队之后,先控制每个携带微型基站的无人机按照救援指令信息进行空中停放处理,直至得到无人机自组网,然后根据救援指令信息和无人机自组网,确定多个微型基站在地面多个基站着陆点,最后控制多个携带微型基站的无人机按照多个基站着陆点进行垂直投放处理,以生成目标微基站网络。该方法不仅有效解决了无人机网络状态不稳定这一难题,同时解决了无人机电量续航问题,进而提高了无人机协同工作的能力,从而得到了稳定的网络通信,并提高了整个无人机自组网的运行效率。
- 还没有人留言评论。精彩留言会获得点赞!