平滑轨迹生成方法和管理调度方法与流程
本技术涉及轨迹生成领域,具体而言,涉及一种平滑轨迹生成方法和管理调度方法。
背景技术:
1、现有的仓库对于车辆的管理调度一般基于车辆的位置进行,因此在车辆行驶过程中需要对车辆进行定位以获取能表示车辆位置的车辆定位信息。而由于仓库内部的卸货过程准确度要求高,管理调度过程对于仓库内部车辆定位信息的精度要求高于仓库外部,因此车辆定位信息获取方法一般为在车辆位于仓库外部时对车辆进行gps定位以获取gps定位信息,将gps定位信息作为车辆定位信息;在车辆位于仓库内部时通过仓库内部的uwb基站对车辆进行定位以获取uwb定位信息,将uwb定位信息作为车辆定位信息。其中,在仓库内部场景下,通过仓库内部的uwb基站对车辆进行定位的精度高于对车辆进行gps定位的精度。
2、但是,在车辆从仓库外部向仓库内部行驶过程中,当车辆靠近仓库时路面往往会变窄且路边的建筑物往往会变多,导致车辆的gps信号变弱使得获取到的车辆定位信息不准确,因此当车辆进入仓库内部时,车辆的定位方式由gps定位切换为由uwb基站进行定位,车辆定位信息瞬间从不准确的gps定位信息切换为较为准确的uwb定位信息,使得车辆定位信息在短时间内产生较大变化,进而可能导致车辆位置无法被及时确定。
3、因此,现有技术有待改进和发展。
技术实现思路
1、本技术的目的在于提供一种平滑轨迹生成方法和管理调度方法,旨在解决当车辆进入仓库内部时车辆定位信息瞬间从不准确的gps定位信息切换为较为准确的uwb定位信息,使得车辆定位信息在短时间内产生较大变化,进而导致车辆位置无法被及时确定的问题。
2、第一方面,本技术提供了一种平滑轨迹生成方法,用于在车辆位于仓库外部时生成车辆行驶的平滑轨迹,包括:
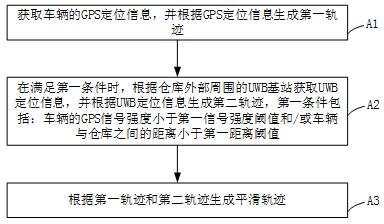
3、获取车辆的gps定位信息,并根据gps定位信息生成第一轨迹;
4、在满足第一条件时,根据仓库外部周围的uwb基站获取uwb定位信息,并根据uwb定位信息生成第二轨迹,第一条件包括:车辆的gps信号强度小于第一信号强度阈值和/或车辆与仓库之间的距离小于第一距离阈值;
5、根据第一轨迹和第二轨迹生成平滑轨迹。
6、本技术提供的平滑轨迹生成方法,能在车辆位于仓库外部时生成平滑轨迹,使得仓库外部的车辆位置能基于平滑轨迹被持续确定,并且在车辆出入仓库时不改变定位基站的类型,能防止车辆定位信息在短时间内变化过大,从而能使得在车辆出入仓库时车辆的位置能被及时确定,此外本技术的平滑轨迹生成方法能综合gps定位和使用uwb基站进行定位的优势,能生成准确度高的轨迹。
7、可选地,第一轨迹包括第一实线轨迹和第一描点轨迹;
8、获取车辆的gps定位信息,并根据gps定位信息生成第一轨迹的过程包括:
9、在车辆的gps信号强度大于等于第一信号强度阈值时,获取车辆的gps定位信息,并根据gps定位信息生成第一实线轨迹;
10、在车辆的gps信号强度小于第一信号强度阈值时,获取车辆的gps定位信息,根据gps定位信息在地图上进行描点,生成第一描点轨迹。
11、在该实施方式中,本技术的平滑轨迹生成方法在车辆的gps信号强度大于等于第一信号强度阈值时生成第一实线轨迹,并且在车辆的gps信号强度小于第一信号强度阈值时生成第一描点轨迹,能在gps定位精度不足时使通过gps定位获取的车辆定位信息直观反映在地图上,并且本技术通过选取组成第一轨迹的点后连接选取的点和第二轨迹,能简便地生成平滑轨迹。
12、可选地,在第一条件包括车辆的gps信号强度小于第一信号强度阈值时,根据第一轨迹和第二轨迹生成平滑轨迹的过程包括:
13、在满足第一条件且车辆与仓库之间的距离大于等于第一距离阈值时,根据第一轨迹和第二轨迹获取中点信息,并根据中点信息生成中点轨迹;
14、根据第一轨迹、第二轨迹和中点轨迹生成平滑轨迹。
15、在该实施方式中,本技术的平滑轨迹生成方法根据中点轨迹和第二轨迹生成平滑轨迹,能使基于平滑轨迹确定的车辆位置更准确。
16、可选地,根据第一轨迹和第二轨迹生成平滑轨迹的过程包括:
17、去除在第二轨迹生成后生成的第一轨迹,并根据第一时长去除在第二轨迹生成前生成的部分第一轨迹;
18、使用平滑的曲线连接剩余的第一轨迹与第二轨迹以生成平滑轨迹。
19、可选地,在第一条件包括车辆的gps信号强度小于第一信号强度阈值时,根据第一轨迹和第二轨迹生成平滑轨迹的过程包括:
20、根据gps信号强度、第一信号强度阈值、第一轨迹和第二轨迹获取过渡位置信息;
21、根据过渡位置信息生成过渡轨迹;
22、根据第一轨迹、过渡轨迹和第二轨迹生成平滑轨迹。
23、第二方面,本技术还提供了一种管理调度方法,包括:
24、在车辆位于仓库外部时,根据上述任一平滑轨迹生成方法生成平滑轨迹;
25、根据所述平滑轨迹对车辆进行管理调度。
26、根据平滑轨迹对车辆进行管理调度。
27、本技术提供的管理调度方法,能在车辆位于仓库外部时生成平滑轨迹,使得仓库外部的车辆位置能基于平滑轨迹被持续确定,并且在车辆出入仓库时不改变定位基站的类型,能防止车辆定位信息在短时间内变化过大,从而能使得在车辆出入仓库时车辆的位置能被及时确定,此外本技术的管理调度方法能综合gps定位和使用uwb基站进行定位的优势,能生成准确度高的轨迹。
28、可选地,根据平滑轨迹对车辆进行管理调度的过程包括:
29、获取车辆通过平滑轨迹的时间;
30、根据时间和平滑轨迹的长度获取车辆的行驶速度;
31、根据行驶速度对车辆进行多车辆规避管理调度。
32、可选地,根据行驶速度对车辆进行多车辆规避管理调度的过程包括:
33、根据平滑轨迹获取车辆的行驶方向信息;
34、根据行驶方向信息和行驶速度获取预测行驶速度;
35、根据预测行驶速度对车辆进行多车辆规避管理调度。
36、可选地,根据预测行驶速度对车辆进行多车辆规避管理调度的过程包括:
37、根据预测行驶速度获取车辆的预测到达时间,预测到达时间为预测得到的车辆从仓库外部到达仓库内部的时间;
38、根据预测到达时间对车辆进行多车辆规避管理调度。
39、可选地,根据平滑轨迹对车辆进行管理调度的过程包括:
40、根据平滑轨迹对车辆和仓库进行匹配;
41、根据相互匹配的车辆和仓库生成仓库引导路径,以使车辆按照仓库引导路径向仓库行驶。
42、可选地,根据平滑轨迹对车辆进行管理调度的过程包括:
43、在车辆进入仓库后,根据平滑轨迹生成卸货引导路径,以使车辆按照卸货引导路径向仓库内部的卸货区域行驶;
44、在车辆到达卸货区域后,基于货物的uwb定位信息规划货物堆叠顺序,以使车辆按照货物堆叠顺序进行卸货。
45、由上可知,本技术提供了一种平滑轨迹生成方法和管理调度方法,其中平滑轨迹生成方法能在车辆位于仓库外部时生成平滑轨迹,使得仓库外部的车辆位置能基于平滑轨迹被持续确定,并且在车辆出入仓库时不改变定位基站的类型,能防止车辆定位信息在短时间内变化过大,从而能使得在车辆出入仓库时车辆的位置能被及时确定,此外本技术的平滑轨迹生成方法能综合gps定位和使用uwb基站进行定位的优势,能生成准确度高的轨迹。
46、本技术的其他特征和优点将在随后的说明书阐述,并且,部分地从说明书中变得显而易见,或者通过实施本技术了解。本技术的目的和其他优点可通过在所写的说明书、以及附图中所特别指出的结构来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!