一种基于无人机挂载的实时可靠性状态检测报警系统的制作方法
本发明属于飞行器,具体而言,涉及一种基于无人机挂载的实时可靠性状态检测报警系统。
背景技术:
1、近年来,随着无人机技术的快速发展,利用无人机进行各种大型或尺寸特定物体的空中运输与安装的需求日益增加。然而传统的无人机正常工作时存在自身震动,而大型或特定形状的物体一旦被无人机吊装起飞,其本身的性质又使得容易出现晃动。这样在飞行过程中就很容易造成失控,无法保证大型物体的安全运输。
2、为解决这一问题,一种思路是在无人机与物体之间增加缓冲装置,以抑制晃动对飞行的影响。另一方面,还需要对物体实时监测,判断其是否处于安全稳定状态。但是现有技术中还没有解决上述问题的有效方案,无法进行精确控制和实时监测。
3、查阅已公开的相关文件,公开号为cn213262909u的技术方案提出一种基于m600pro无人机的软吊挂载装置,其通过采用了主吊索、姿态调整器等工作部件,实现了无人机的挂载能力的增强,并且实现无人机在挂载工作时的稳定性提高;公开号为us20200180763a1的技术方案通过将多个无人机进行协同工作,能够实现大重量挂载物的起吊与运输;公开号为ep3760541a1的技术方案提出无人机装载/卸载装置,其通过采用可选择性移动的电动卷轴,实现对运输物品的起吊以及卸载操作。
4、以上技术方案均提出了若干对于无人机运输方式的稳定性的技术方案,但对于高空挂载的无人机新应用方式,目前尚未见提出有关的提升改进方案。
5、背景技术的前述论述仅意图便于理解本发明。此论述并不认可或承认提及的材料中的任一种公共常识的一部分。
技术实现思路
1、本发明的目的在于,提供一种基于无人机挂载的实时可靠性状态检测报警系统,属于飞行器技术领域。所述检测报警系统包括提升子系统和预警子系统。提升子系统通过机载控制模块、固定模块中的双固定件设计、磁吸附机构以及临时固定索与无人机进行连接。预警子系统包含多种传感器实时监测张力、姿态等参数。系统利用磁吸附将挂载物与无人机连接;放置挂载物后,通过固定模块与临时固定索使其暂时连接在目标位置;然后预警子系统判断挂载物是否稳定,若稳定,则无人机释放临时固定索。关键的是,系统采用张力波动计算方法判断稳定性,并采用机载控制模块通过控制无人机电机的推力来维持飞行平稳。该系统能够有效实现无人机安全挂载物体并判断其稳定状态的目的。
2、本发明采用如下技术方案:
3、一种基于无人机挂载的实时可靠性状态检测报警系统,所述检测报警系统应用于使用无人机将被挂载物挂载到目标位置的工作过程;所述检测报警系统包括提升子系统和预警子系统;
4、所述提升子系统包括:
5、机载控制模块,被配置为根据所述预警子系统的侦测信号持续控制无人机以保持无人机在飞行和/或悬停过程中的姿态平稳;
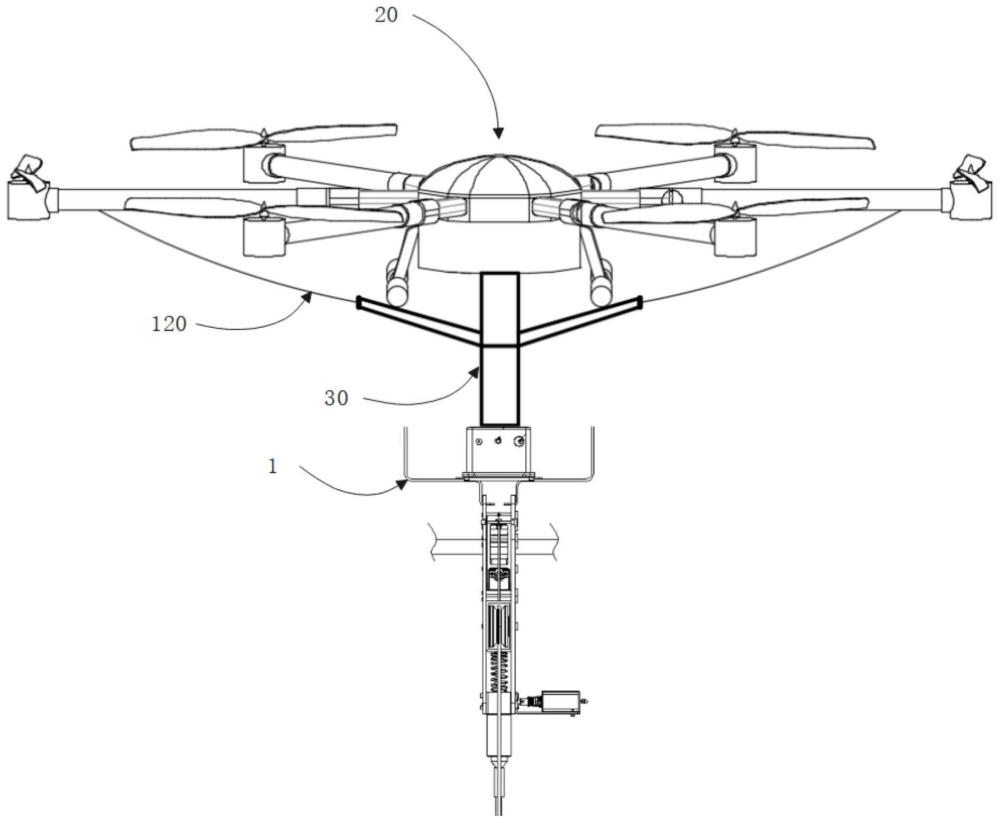
6、多条临时固定索,所述临时固定索的固定端连接于固定模块,所述临时固定索的活动端连接于无人机;
7、固定模块,包括与被挂载物上的挂载机构固定连接的第一固定件,以及与所述第一固定件活动连接的第二固定件;其中第二固定件具有多个朝外伸展的悬梁;多条所述临时固定索的所述固定端与所述悬梁固定连接;
8、降落伞模块,用于在检测到电机故障或者无人机姿态失控时,弹出降落伞使无人机安全降落;
9、所述预警子系统包括多个传感器;其中至少包括:配置于无人机以及所述第一固定件上的陀螺仪传感器,配置于所述临时固定索的张力传感器,配置于无人机驱动器上的负载传感器;所述预警子系统与所述机载控制模块通讯连接,并将传感器数据发送到所述机载控制模块;
10、其中,所述第二固定件的具有第一磁吸附模块,用于与无人机底部对应的第二磁吸附模块连接;并且所述磁吸附装置通过所述机载控制模块的指令控制其吸附和松脱,以实现无人机与被挂载物整体的结合和分离;
11、通过所述预警子系统的传感器感测信号,判断被挂载物是否稳定于目标位置,基于被挂载物的稳定状态,所述提升子系统生成对无人机以及所述固定模块的控制指令;
12、优选地,所述固定模块中,所述第一固定件和所述第二固定件之间设置有第一联轴器,通过所述第一联轴器的设置使第一固定件相对于第二固定件具有两个方向的旋转自由度;
13、其中,所述第一固定件包括第一端、第二端以及设置在第一端和第二端之间的第一通孔;所述第二固定件包括第三端、第四端以及设置在第三端和第四端之间的第二通孔;其中,第一联轴器包括第一轴体,以及与所述第一轴体通过第一接头活动连接的第二轴体;并且所述第一轴体位于所述第一通孔;
14、优选地,在所述第二固定件的第四端中央设置所述第一磁吸附模块,并且所述第一磁吸附模块具有与无人机底部的所述第二磁吸附模块对齐吸附并啮合的配合机构;
15、优选地,所述固定模块还包括设置在第二通孔内并与第一联轴器的第二轴配合的滑动构件;
16、优选地,当所述第二固定件通过磁吸附模块与无人机稳定连接时,多条所述临时固定索处于松驰状态;
17、优选地,所述检测报警系统包括采用以下步骤实施工作:
18、s100:将所述第一固定件与挂载机构连接,将所述第二固定件通过磁吸附模块与无人机吸附连接,将多条临时固定索的两端分别与无人机以及第二固定件的多个悬梁连接;在无人机提升时,所述固定模块与被挂载物一起随无人机提升并到达挂载目标点;
19、s200:无人机将所述挂载机构放置在挂载目标点位后,无人机脱开与所述第二固定件的磁吸附连接,此时仍然保留与多个所述临时固定索的活动端的连接;
20、s300:所述预警子系统通过传感器的侦测信号,确定所述固定模块是否处于稳定状态;若稳定则进行步骤s400;
21、s400:无人机缓慢抬升并保持每条所述临时固定索处于张紧状态,通过所述提升子系统在一个观测时间t内,侦测多条所述临时固定索的张力是否能够稳定在指定阈值内,并在确认多条所述临时固定索的张力稳定后,松开多条所述临时固定索,以完整脱离所述待挂载物;
22、优选地,在步骤s400中,设定一个张力阈值fm,通过以下计算式,确定所述固定模块是否处于稳定状态:
23、
24、上式中,fi为第i条所述临时固定索的张力,为多条所述临时固定索的张力值的平均值,max()为求最大值函数;fm的数值根据无人机的额定输出总功率以及所提升的被挂载物的重量由相关技术人员进行设定;
25、若上式在一个预设的观测时间t内成立,则认为所述固定模块处于稳定状态;t由相关技术人员进行设定;
26、优选地,所述机载控制模块包括采用以下步骤保持无人机的姿态平稳:
27、通过接收来自多个传感器的不平衡姿态和/或不平衡负载的异常信号来连续检测无人机飞行中的不平衡情况;
28、响应于所述异常信号,控制无人机中的一个电机或多个电机的组合,以消除无人机的不平衡姿态和/或不平衡负载;
29、主动补偿飞行操作过程中引起的不平衡负载;其中,在补偿过程中,所述机载控制模块通过改变传递给一个或多个无人机电机的功率,从而增大与不平衡负载相反方向的一个或多个无人机电机的推力,或减小靠近不平衡负载位置的一个或多个无人机电机的推力。
30、本发明所取得的有益效果是:
31、1.本技术方案的检测报警系统通过预警子系统中的多种传感器实时监测挂载物的张力、姿态等参数,并利用计算方法判断稳定性,可以及时了解挂载物的状态,确保挂载的可靠性;
32、2.本技术方案的检测报警系统采用机载控制模块主动控制无人机电机的推力来平衡不稳定因素,以及固定模块中的双联轴器结构提供缓冲,可以有效抑制挂载物的晃动,提高飞行时的平稳性;
33、3.本技术方案的检测报警系统采用模块化的双子系统设计、配合灵活的机械结构及控制方式,这不仅提高了系统的可靠性,也便于工程实现和应用推广;
34、4.本技术方案的检测报警系统的各工作部分采用模块化设计,可以通过单独优化和替换其中的工作模块,实现系统的维护和升级,降低了后续的使用成本和升级成本。
- 还没有人留言评论。精彩留言会获得点赞!